基于多源数据的光伏电站在线热斑检测性能评价系统研究
2023-02-20耿洪彬张英杰魏燕飞毛晨旭邢志同
耿洪彬,张英杰,魏燕飞,毛晨旭,邢志同
(国网山东省电力公司德州供电公司,山东 德州 253000)
0 引言
面对日益突出的全球能源危机以及化石能源燃烧导致的环境污染问题,世界各国纷纷投入巨大的人力、物力用于对绿色可再生能源的开发研究,我国也将开发环保型能源系统视为可持续发展战略中重要的一环。以清洁、低碳、可再生为特点的光伏发电逐渐成为人们关注的重点,光伏发电技术由此迅猛发展[1-3]。大型光伏电站大多建于光源充足却人烟稀少的地方,如荒漠、草原等,部分光伏发电设备工作环境极为恶劣,随着投运时间的增加,光伏电站的运营、维护正面临着严峻的挑战[4]。越来越多的光伏电站面临运维难题,已经严重影响到其发电量及运行稳定性。对于正处在高速发展阶段的国内光伏产业来说,提高光伏电站的运维效率和管理质量至关重要。
为了保证光伏电站的发电量,光伏电站业主需要充分考虑影响光伏组件寿命和发电效率的不利因素,热斑是在光伏电站运行中经常出现的一类故障。光伏组件中部分区域由于被遮挡或者自身存在裂纹、脱层、连接不良等缺陷,被当作负载消耗其他区域所产生的能量,从而产生热斑。热斑不仅会降低光伏电站的发电效率,还会导致局部过热[5-8],损坏光伏组件,严重威胁光伏电站的安全运行。为减少热斑效应所带来的危害,有必要对热斑进行快速有效的检测,因此光伏组件的巡检工作非常重要,热斑效应检测的市场前景十分广阔。传统的光伏电站运营维护主要依靠运维人员手持热像仪等设备定期巡检,这种方式对于热斑的检测耗费时间长,准确率低,效率不高且很容易漏检,使得故障进一步恶化,造成更大的损失[9]。且随着光伏电站的规模不断扩大,其运维工作量及运维成本大幅度提升,传统的人工巡检方式已不能满足需要。现代航空工业、传感器以及人工智能技术的快速发展,促使旋翼无人机巡检应用到光伏电站运维工作中。无人机巡检[10-11]与传统人工巡检方式相比具有鲜明的优势,其覆盖面积大、检测效率高、便于获取图像、灵活性高,因此,有必要结合旋翼无人机研究新型光伏电站在线热斑检测运维方法。
结合无人机巡检与阴影类别判定技术,通过搭载可见光相机与红外相机的无人机对光伏电站进行影像数据采集工作,提出基于红外图像与可见光图像配准的光伏阵列热斑定位的方法。通过基于改进的鱼群灰色组合预测方法进一步判别光伏电站阴影类型,及时排除光伏组件热斑的外部影响因素,进而判定多因素影响下的热斑成因,并结合工程实际,构建出基于无人机红外与可见光检测的光伏电站在线热斑检测运维系统,实现热斑自动告警与定位排查,减少运维人工成本,能够较大程度提高中、大规模光伏电站的维护质量和可靠性,进一步提高光伏电站的安全性。
1 基于红外图像与可见光图像的光伏电站阴影类别判定与热斑定位
1.1 基于混合鱼群灰色组合预测的光伏电站阴影类别判定方法
光伏组件运行过程中的阴影分为硬性阴影和软性阴影两种类型[12-13]。硬性阴影的位置、大小恒定,具有时不变性;软性阴影会随时间变化,具有时变性,若其长时间不排除也可能使光伏电池片损坏成为硬性阴影。不同类型的阴影对光伏电池板的损害情况不同,其维修和清除的方式也不同,因此,需要及时准确辨别出阴影的类型,避免光伏组件进一步损坏,减少发电量损失。
为实现光伏组件阴影类型的精准判别,采用基于混合鱼群灰色组合预测[14]的光伏电站阴影类别判定方法。首先使用小波分解方法对光照强度、温度数据进行分解,滤除噪声数据,得到平滑的趋势项数据,再采用混合鱼群灰色组合预测模型预测光伏组件的发电功率,然后对比预测功率和实际输出功率之间的差异,最后通过分析模型精度误差来判别软、硬性阴影故障类型。
灰色预测[15-16]是利用灰色模型(Grey Model,GM)建立起来的预测模型,具有易于验证、数据需求少、不考虑分布规律等优点,但预测精度较低,无法直接应用于阴影判别,为此特地引入全局搜索能力较强的鱼群优化算法,建立混合鱼群灰色组合预测模型。
设置初始参数,包括人工鱼群数量、最大迭代次数、拥挤度因子、感知距离、单次捕食的最大试探次数、人工鱼视野范围上下限等参数,设置向量θv表示第v条人工鱼的状态,个体人工鱼θv的适应度(fθv)为

式中:x(0)(w)为该条人工鱼在w时刻的实际状态值;为该条人工鱼在w时刻的状态估计值;n为历史状态数据个数;α为背景值;β为边值修正量。
个体人工鱼通过觅食、聚群及追尾三种基本行为进行自主择优移动,对比人工鱼个体状态,择优记录,确保记录的人工鱼适应度为最优,当达到最大迭代次数时,输出最优解,将最优解代入灰色模型中,得到混合鱼群灰色组合预测模型。
1.2 基于斜率约束的光伏组件红外图像及可见光图像配准的热斑定位方法
传统的热斑定位方法[17-18]主要是结合无人机的飞行高度,将可见光图像或红外图像中的经纬度进行位置换算,这种依靠单一图像定位的方法存在较大的经纬度误差,定位精度不高。因此需要引入图像配准技术[19-20],获取关于相同场景的红外图像和可见光图像,通过定位两幅图中同一位置的像素点来完成图像匹配。由于红外图像和可见光图像具有不同的成像原理,所以两者提取的特征点往往不是一一对应的,为了能够充分利用两种图像的特征信息,提高热斑定位精度,采用基于斜率约束的光伏组件图像配准算法,通过斜率约束实现图像的精确配准,从而准确定位光伏电站中的热斑组件。
对光伏阵列两种图像进行配准时,将光伏阵列红外图像用I1表示,可见光图像用I2表示,设置I1和I2的尺寸相同,均为a×b,a为图像中像素的行数,b为图像中像素的列数,使用Harris特征提取方法对I1和I2进行特征提取,得到特征点集合分别为:
式中:h、k分别为光伏阵列红外图像I1和可见光图像I2提取到的特征点数量;(xi,yi)为I1中第i个特征点坐标;(x′j,y′j)为I2中第j个特征点坐标。
从po(sI1)中任意取一个特征点,计算其与po(sI2)中所有特征点的马氏距离。马氏距离由印度统计学家马哈拉诺比斯(P.C.Mahalanobis)提出,表示数据的协方差距离,是一种有效的计算两个未知样本集的相似度的方法。选择马氏距离最小的一对特征点作为粗配准点对,然后将所有粗配准点对根据马氏距离从小到大进行排序,剔除其中含有相同特征点的粗配准点对,将po(sI1)和po(sI2)剩下的特征点分别用po(sI3)和po(sI4)表示。选择po(sI3)和po(sI4)中前20 对配准点对,计算两点的斜率,即

式中:xq、yq分别为po(sI3)中第q个特征点的横坐标与纵坐标;x′q、y′q分别为po(sI4)中与(xq,yq)点配准的特征点的横坐标与纵坐标。
将所有斜率值取整,筛选其中出现频率超过3次的斜率值形成一个斜率集合knew={k1,k2,…,kp},p<20。如果所有斜率值都只出现过一次,则选择前10对配对点作为knew。找出斜率集合knew中出现频率最高的斜率值kq,遍历计算po(sI3)和po(sI4)中所有满足[kq-0.5,kq+0.5]的配准点对,形成新的集合po(sl)。
2 基于无人机红外与可见光检测的光伏电站在线热斑检测性能评价运维系统设计与构建
2.1 系统结构
设计与构建的基于无人机红外与可见光检测的光伏电站在线热斑检测运维系统由现场采集与控制层、远程信息管理中心以及光伏电站智慧运维主站3个部分构成。系统架构如图1所示。
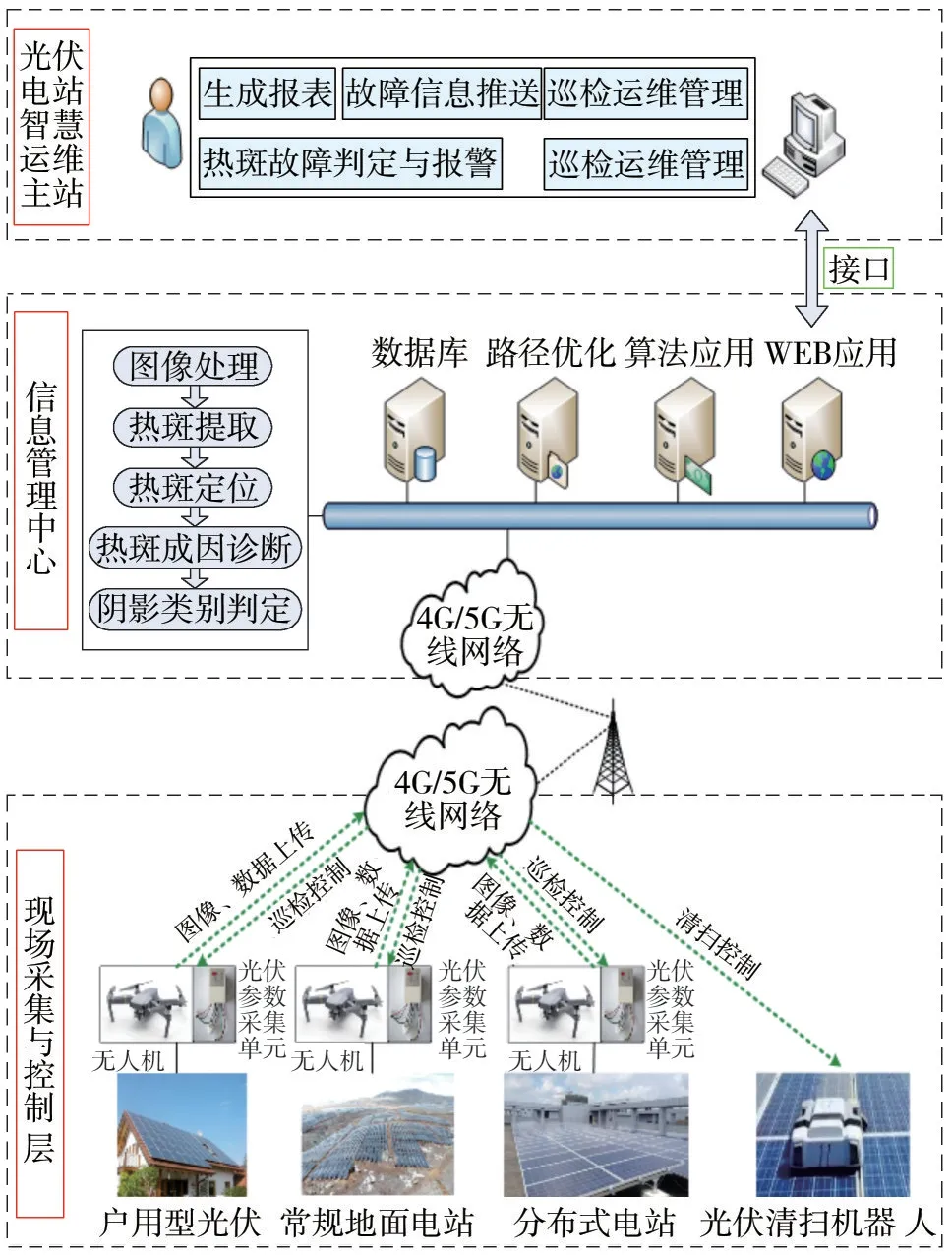
图1 系统架构
在现场采集与控制层中无人机按照预设航线飞行,通过搭载的可见光相机与红外相机对光伏电站进行拍摄,光伏参数采集单元负责采集现场的温度、光照强度以及光伏组件的电气量信息,拍摄的图片和采集到的信息经由无线网络上传到信息管理中心。信息管理中心对其接收到的信息进行处理分析,计算热斑实际位置,进而得到待清洗及检修的位置信息,并将其打包上传至光伏电站智慧运维主站。信息管理中心能够依据光伏电站的全景信息对无人机进行航迹规划,也能按照待清洗及检修的位置坐标对光伏清扫机器人的清扫路径进行规划。光伏电站智慧运维主站能够向运维人员展示巡检及清扫的采集图像、巡检结果报告等信息。运维人员也可通过光伏电站智慧运维主站直接下达清扫及巡检指令至信息管理中心,信息管理中心再根据其所指定的路径控制光伏组件清扫机器人和无人机进行清扫和巡检。
2.2 系统信息判别流程
基于无人机红外与可见光检测的光伏电站在线热斑检测运维系统进行巡检作业时的信息判别流程如图2所示。
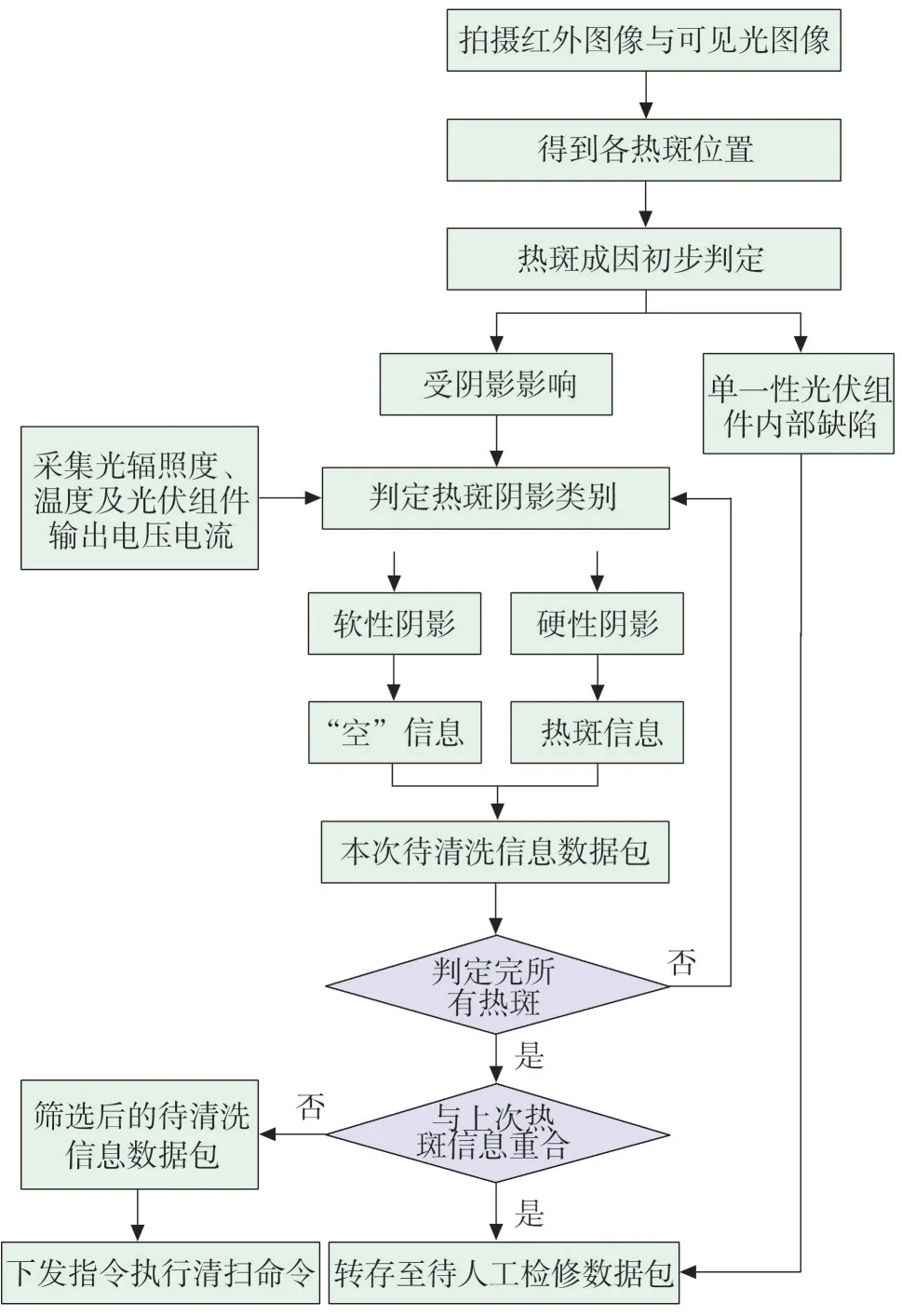
图2 系统信息判别流程
首先将采集的红外图像与可见光图像进行预处理,通过采用基于斜率约束的光伏阵列图像配准算法得到各热斑所在准确位置,并初步判定热斑成因。将由单一性光伏组件内部缺陷所导致的热斑特征图像及位置信息存至待检修数据包,并对受外部阴影影响的热斑进行阴影类别判定:结合温度、光照强度以及光伏组件电气量信息,采用改进的鱼群灰色组合预测方法逐个判定热斑的阴影类型,若为软性阴影,发送“空”信息到待清洗信息数据包;若为硬性阴影,则发送热斑的图像、位置等信息到待清洗信息数据包,直至判定完所有热斑。待清洗信息数据包中每次热斑信息存入时,需与上次存入的热斑信息进行筛选比较:若本次热斑信息与上次有重合部分,则将重合部分的热斑信息转存到待检修信息数据包,并进一步根据图像信息判定该热斑成因;若本次热斑信息与上次没有重合,则将本次热斑信息保存到待清洗信息数据包中。最后根据筛选后的待清洗信息数据包存储的位置信息,制定光伏组件清扫机器人的清扫路径,并向其下达清扫指令。
2.3 系统功能
基于无人机红外与可见光检测的光伏电站在线热斑检测运维系统集成实现了巡检运维管理、大数据存储与处理分析、热斑故障判定与告警、故障信息推送等功能。
1)巡检运维管理。包括无人机飞行路径规划、无人机巡检周期制定、清扫路径规划、图像信息管理、飞行设备及清扫设备状态管理,具备远程巡检操控功能,实现全自动远程巡检管理。
2)大数据存储与处理分析。通过无线通信协议,实时采集、存储和处理光伏电站图像及数据,并将数据依照不同功能分别进行存储,形成实时历史数据库和分布式管理数据库,实现故障数据的高效管理。
3)热斑故障判定与告警。依据历史故障数据判定光伏组件故障缺陷状况,对于每次巡检的结果可快速生成报告,将光伏电站待人工检修信息及时展示在光伏电站智慧运维平台,通过图像直观展现故障分布情况,针对配置的告警规则,实时产生故障告警信息。
4)故障信息推送。检测到热斑后,系统自动将故障信息推送到相关运维检修人员的手机APP,并为之提供检修方案,帮助完成电站热斑故障消除。
3 系统应用及其性能分析
3.1 系统应用实例与效果
所构建的基于无人机红外与可见光检测的光伏电站在线热斑检测运维系统于2020年6月在山东济宁高新区20 MW 光伏电站投入使用,针对热斑效应开展日常巡检工作。目前该系统运行稳定,巡检控制安全可靠,该运维系统信息采集与图像处理如图3—图4 所示。该系统利用无人机可在2 天内完成20 MW 电站所有光伏阵列的巡检,比人工巡检效率高出数十倍,同时热斑检测准确率高,平均每月由热斑导致的功率损失较之前减少了32.6%,有效提高了发电量。且系统能够有效分辨出光伏电站热斑形成的内因与外因,主动筛除遮挡、表面脏污等光伏组件外部因素,进一步锁定热斑成因,为运维人员后续的故障检修工作提供了有力的依据和指导。
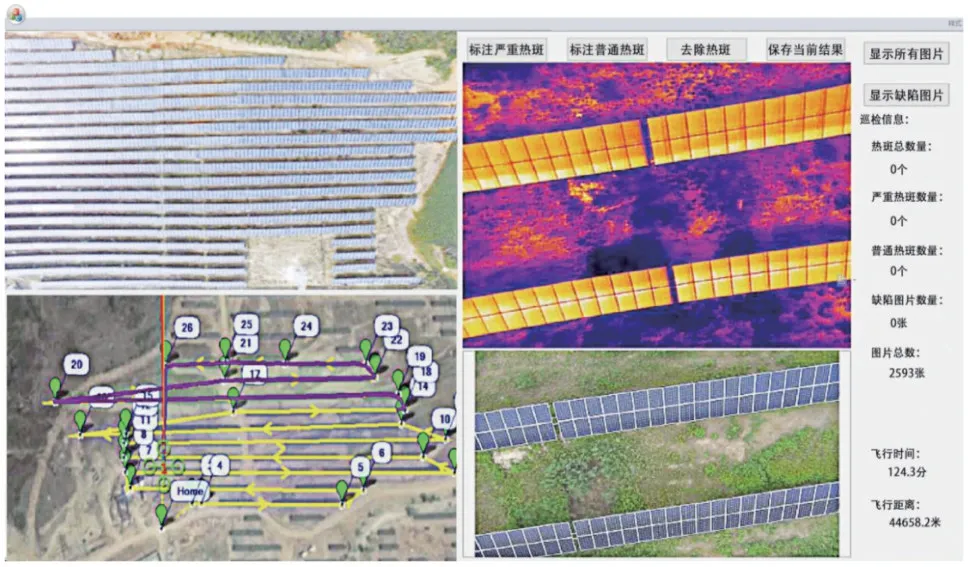
图3 系统信息采集截面
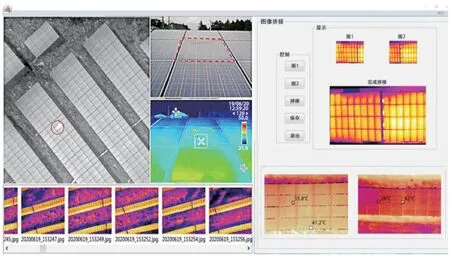
图4 系统图像处理截面
3.2 系统应用实例与效果
为验证该系统实际效果,在该电站选取约1 MW区域进行检测。该区域内共有热斑108 个,其中光伏组件内外部因素共同造成的热斑有12 个,仅由外部因素造成的热斑有68 个,仅由内部缺陷造成的热斑28 个。经过现场分析,确定该区域各热斑缺陷数量为:阴影遮蔽80 个、气泡17 个、断栅7 个、碎片4个、隐裂10 个。为了检验该系统热斑检测结果的准确性,将所提热斑信息判定方法与文献[21]提出的基于统计学模型的热斑判别方法进行对比,检测数据如图5所示。
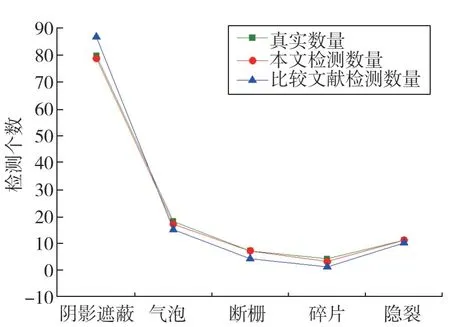
图5 检测数据对比
所提热斑信息判定方法热斑漏检个数为3 个,漏检率为2.78%;误检1 个,误检率为0.93%;检测准确率为96.29%。而使用文献[21]的方法漏检热斑10 个,漏检率为9.26%;误检7 个,误检率为6.48%;检测准确率为84.26%。从以上数据可以得出,所提热斑信息判定方法比文献[21]的检测结果更接近真实值,检测效果更好。
4 结语
应用无人机巡检,提出红外图像与可见光图像配准融合技术,降低了红外目标的误判率,提高了热斑定位精度,为后续准确消除光伏组件热斑的外部影响奠定基础。基于改进的鱼群灰色组合预测方法判定光伏电站阴影类型,并在此基础上设计了热斑信息判定流程,构建了基于无人机红外与可见光检测的光伏电站在线热斑检测运维系统,能够提高热斑成因检测准确度与检测效率,较大程度提高中、大规模光伏电站的维护质量和可靠性。
