MATLAB在直流调速系统教学中的应用
2023-02-09王麟珠戴立庆
王麟珠 戴立庆
福建船政交通职业学院 福建福州 350007
在轧钢机、挖掘机、金属切削机床等电力拖动系统中,直流电动机不仅具有良好的启动和制动性能,而且兼具大范围内的平滑调速等特点,应用领域极其广泛。而交流调速系统的研究又是以直流调速系统为基础的,因此,在自动调速系统中,直流调速系统具有不可替代的作用。
直流调速系统课程综合性较强,要求学生具备“自动控制原理”“电力电子技术”“电力拖动基础”等专业课程的基础知识,因此,在教学过程中,教师授课难度大,学生接受效果差。将MATLAB软件应用于直流调速系统课程的教学中,不仅可以使抽象知识形象化,有利于学生对知识的吸收,而且便于分析各参数对系统的影响。与采用实验台进行实验相比较,软件仿真更容易进行参数设置与调试,可以观察到动态过程中参数的变化,且易于故障分析和排除,并能够进行线上教学。在传统理论教学和实验教学相结合的基础上,改进课程教学模式,采用“三位一体”的教学模式,即课堂理论知识讲解、软件模拟仿真、实验台实物接线调试,能够使学生更加深入地理解直流调速系统工作原理,增强学生分析问题的能力,锻炼学生实践动手能力。
1 开环直流调速系统
直流电动机的转速方程式为:
式中:n为转速,U为电枢电压,I为电枢电流,R为电枢回路总电阻,Ke为电动势系数,Φ为励磁磁通。
从转速方程式可知,调节电枢电压可以实现对电动机的调速,这也是最常用的调速方法。开环直流调速系统是最简单的调速系统,由主电路和控制电路两大部分组成,主电路部分有三相交流电源、晶闸管整流桥、平波电抗器、直流电动机,控制电路由给定电压和脉冲触发电路组成。
运用MATLAB/Simulink/simPowerSystems进行电气元件建模仿真,图1所示为开环直流调速系统仿真模型。建立电气元件模块仿真模型的过程,相当于学生进行了虚拟仿真接线,也让学生明白在实验台实验过程中的接线步骤和注意事项,加深学生对系统结构和工作原理的理解。

图1 开环直流调速系统仿真模型
由于开环直流调速系统的机械特性软,无法满足生产机械对调速系统的性能指标要求,为提高直流调速系统的机械特性硬度,可引入单闭环直流调速系统。
2 单闭环直流调速系统
与开环调速系统相比较,保持主电路不变,控制电路增加了转速检测、比较和转速调节器,就可完成单闭环直流调速系统的构建,原理框图如图2所示。通过对直流电动机的实际转速进行检测,将实际转速和期望转速做比较,采用转速调节器对系统进行调节,实现单闭环系统的自动调节功能。
2.1 有静差直流调速系统
在单闭环直流调速系统中,当转速调节器为比例调节器(即P调节器)时,系统为有静差直流调速系统,即系统自动调节进入稳态后,实际转速值和期望转速值存在一个差值,图2所示为单闭环有静差直流调速系统组成框图。与开环系统相比,单闭环系统具有静特性硬和静差率小的特点,并且调速范围和抗干扰能力得到有效提高。系统对前向通道上的扰动(如电网电压波动、负载变化等)能起到有效抑制作用,在软件仿真时,可实现在任意环节加上干扰信号,进而对系统抗干扰性能进行分析。

图2 单闭环有静差直流调速系统组成框图
2.2 无静差直流调速系统
为了使系统达到实际转速值与期望转速值一致,采用比例积分调节器(即PI调节器)取代单闭环有静差直流调速系统中的比例调节器,这一系统即为无静差直流调速系统。与有静差系统相比,无静差系统增加了积分调节作用,积分调节器可使系统实现无静差恒速稳定运行,但由于积分调节为滞后环节,会大大降低系统响应的快速性,因此,采用比例积分调节器,综合比例控制满足快速性要求和积分控制满足准确性要求的优点。仿真时,通过改变PI调节器Kp、Ki两个系数的大小,可观察两个参数对系统的影响,匹配出最优参数,以便实验台实验使用。采用软件仿真,参数修改快捷简便,可细致观察系统响应曲线,能有效提高实验效率。
2.3 带电流截止负反馈的无静差直流调速系统
直流电动机在启动过程中会形成过大的冲击电流,损坏过载能力低的晶闸管,此外,部分生产机械的电动机在工作过程中可能会遭遇堵转状况,因此,在无静差调速系统的基础上增加电流截止负反馈环节。当电枢电流在正常范围工作时,电流截止负反馈未启动,此时系统就是无静差调速系统;当电枢电流超过允许值时,电流截止负反馈环节将电流反馈信号送至比较器,通过闭环系统的自动调节功能,达到有效降低电枢电流的目的。
3 双闭环直流调速系统
虽然带电流截止负反馈的无静差调速系统实现了无静差调速和限制过大电流,但同时也使电动机启动时的电流受限,因此影响了电动机启动的快速性。为解决这一问题,在单闭环系统的基础上增加电流检测器和电流调节器,构成双闭环直流调速系统,即系统具有转速负反馈外环和电流负反馈内环两个闭环。在双闭环系统中,转速调节器和电流调节器均采用PI调节器。在启动过程中,转速调节器很快进入饱和状态,输出达到最大限幅值,该限幅值即为电流环的给定值,电流负反馈发挥调节作用,使电流保持最大值,转速以最快速度增大达到目标值;当转速出现超调,转速调节器得以退饱和,转速负反馈外环发挥闭环调节作用,电流环跟随转速环调节;系统进入稳态后,转速达到目标值,实现转速无静差,电枢电流与负载电流相等,电磁转矩与负载转矩平衡。双闭环调速系统达到了稳定性、准确性和快速性的控制要求,但在启动过程中,转速会出现超调,为了解决这一问题,可通过增加一个转速微分负反馈,实现转速超调的抑制。
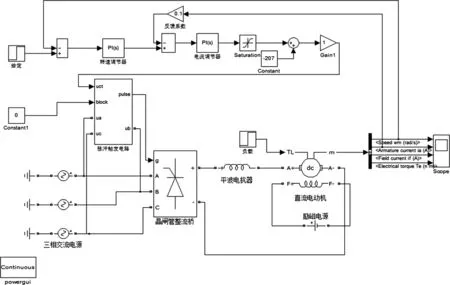
图3 双闭环直流系统仿真模型
图3所示为基于MATLAB的双闭环系统仿真模型,运用MATLAB软件便于观察系统动态调节过程中各参数的变化情况,通过调节转速调节器和电流调节器的Kp、Ki参数,学生可以总结出两个调节器对系统的影响。通过对转速微分负反馈参数的调节,可匹配出最优参数使系统达到最佳性能指标。通过对转速反馈线接反或反馈线突然断线等各种故障情况的仿真,学生能够较容易观察出系统各环节及参数的变化情况,对在实验台实验过程中的排故有了充分的经验积累,使学生在实验台实验前做到心中有数、轻松应对。

图4 各系统转速响应曲线
图4为各系统的转速响应曲线,从曲线中可以看出,单闭环有静差系统、单闭环无静差系统、双闭环系统是直流调速系统的不断改进过程,使直流调速系统不仅具有良好的启动特性和抗干扰能力,而且稳态性能好,可以达到工业生产机械的性能指标要求。
4 双闭环可逆直流调速系统
4.1 有环流可逆调速系统
双闭环直流调速系统已能够较好地满足性能指标要求,但由于晶闸管的单向导电性,主电路只有一组晶闸管整流装置,只能提供单方向的电流,因此,无法实现电机的可逆运行,即电机无法实现正反转切换和制动。因此,主电路需要采用正反两组晶闸管整流装置,正组晶闸管整流装置提供正向电流,反组晶闸管整流装置提供反向电流。通过对两组晶闸管整流装置控制角的调节,可实现晶闸管装置处于整流或逆变状态,从而实现电机四象限运行。
由于主电路回路采用了两组晶闸管整流装置,因此,电路中存在环流问题,即使控制回路在双闭环控制的基础上加上配合控制,也只能消除直流平均环流,无法消除瞬时脉动环流。为此,主电路回路必须串入环流电抗器,以抑制脉动环流。
4.2 无环流可逆调速系统
为彻底消除可逆直流调速系统中的环流,在双闭环控制回路中增加无环流逻辑控制器,通过对电机四象限运行的分析,可知处于工作状态的晶闸管装置只有一组,无环流逻辑控制器开放处于工作状态的晶闸管装置触发脉冲,封锁另一组处于待工作状态的晶闸管装置触发脉冲,从而切断环流回路,实现无环流控制,主电路回路也就不再需要串入环流电抗器,图5所示为逻辑无环流可逆调速系统仿真模型。
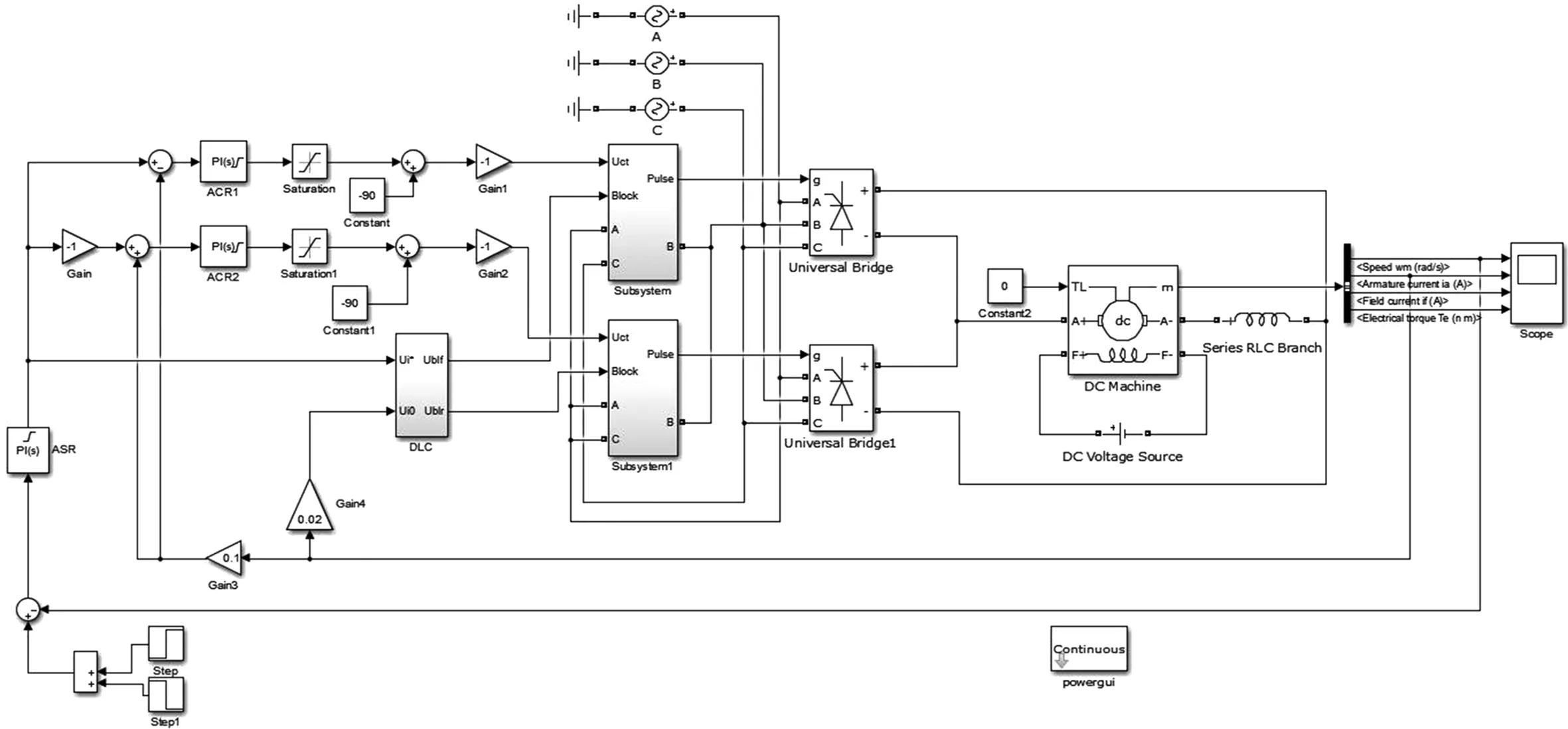
图5 无环流可逆直流调速系统仿真模型
结语
本文针对开环直流调速系统存在机械特性软的问题,引入单闭环系统。对单闭环系统启动快速性不足问题,引入双闭环调速系统,实现满足调速范围大、静差率低等性能指标要求的直流调速系统。为实现电机可逆运行,主电路采用两组晶闸管装置。为消除可逆系统中的环流,在控制回路增加无环流逻辑控制器,最终实现双闭环控制的无环流可逆直流调速系统。将直流调速系统课程由简单到复杂进行剖析,建立各系统间有机统一体的关系,使学生更加系统性地掌握直流调速系统的知识点。同时,运用MATLAB软件进行建模仿真,通过仿真模型的搭建,学生可以更好地掌握系统的组成原理;通过对比各系统的转速响应曲线,学生可以直观地看出系统得到了一步步的改善;通过对各种故障情况模拟仿真,学生能够更加快速地对故障情况进行分析和排查,结合“三位一体”的教学模式,教学效果得到有效改善。
