利用轨迹追踪技术测量重力加速度
2023-02-03洪玲儿杨泽斌郑建银
洪玲儿,杨泽斌,郑建银,彭 力,2
(1.华南师范大学 物理与电信工程学院,广东 广州 510006;2.华南师大(清远)科技创新研究院有限公司,广东 清远 511517)
目前测量重力加速度的方法有自由落体法、原子干涉法、单摆法以及圆锥摆法等. 自由落体法[1]操作简单,但其运动轨迹容易受环境影响而偏离竖直方向;原子干涉法[2]测量结果较为精确,但对实验的要求较高;单摆法[3-5]在测量过程中容易形成圆锥摆,且对摆角有一定要求;圆锥摆法[6]利用圆锥摆测量重力加速度,但运动周期利用人眼观察结合秒表计时会造成一定的实验误差;文献[7]利用光电门来减小确定周期的误差,但该实验需手动调节带千分头的探头来确定小球高度导致操作较为复杂,且只定性观察小球的运动来判断小球是否做匀速圆周运动缺乏严谨性.
由此,本实验利用直流电机驱动小球运动,采用高速摄像头结合轨迹追踪技术对小球进行实时追踪,通过图像分析得出小球在不同驱动电压下的相对运动轨迹与匀速圆周运动的符合程度,并得到驱动电压为2.4 V时,小球能够做较为严格的匀速圆周运动. 在获得运动图像的基础上,由虚拟仪器测量技术进行分析,得出小球运动图像的周期以及圆锥摆摆角的余弦值,从而计算出重力加速度. 经多次测量得到的广州地区重力加速度为9.812 m/s2,相对偏差在0.5%以内. 表明该实验装置具有实时监测功能,操作简单、测量准确以及测量效率高等特点.
1 基本原理
将小球与细绳相连,若忽略空气阻力,在直流电机的驱动下,由小球所受细绳拉力与重力的合力提供向心力,使小球在水平面上做匀速圆周运动. 建立如图1所示直角坐标系:
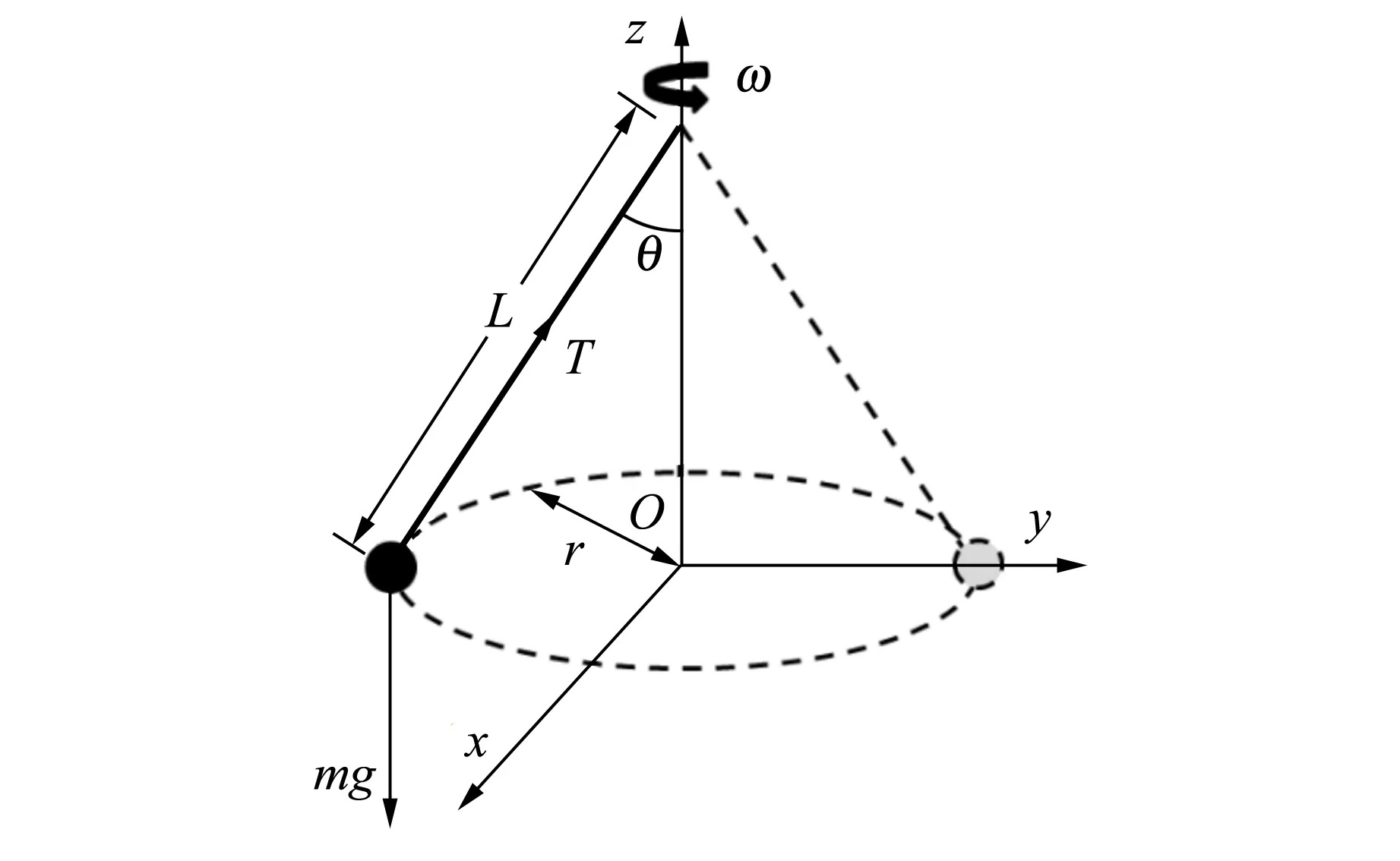
图1 实验原理图
通过对小球受力分析可得:
(1)
其中,T为细绳给小球提供的拉力,m为小球的质量,g为重力加速度,θ为圆锥摆摆角,ω和r分别是小球做圆周运动的角速度和半径.联立该方程组得:
(2)
由几何关系可知:
r=Lsinθ,
(3)
其中
(4)
l为细绳长度,d为小球直径.若小球做匀速圆周运动的周期为T,则有
(5)
由式(2)~(5)可得:
(6)
因此,利用圆锥摆测量重力加速度的关键是要让小球做匀速圆周运动.图2为小球做匀速圆周运动的示意图,满足:

(7)
因此,当小球的x-t和y-t曲线分别为余弦曲线和正弦曲线,且振幅和角速度相等时,即可说明该小球做匀速圆周运动.在这一前提下,通过测量细绳长度l、小球直径d、摆角θ以及小球做匀速圆周运动的周期T,根据式(6)即可计算出重力加速度g.

图2 小球做匀速圆周运动示意图
2 实验装置
图3为实验的整体装置图,主要由驱动装置和测量装置构成.驱动装置由学生电源、直流电机、传送带和转轴组成.利用学生电源给直流电机提供恒定电压,可使直流电机稳定转动.为降低电机转速,利用传送带带动转轴转动从而驱动小球在xOy面(图1)上做匀速圆周运动.另外,本实验是由图3中△ABC的几何关系来计算得到圆锥摆摆角的余弦值cosθ,为更好地拍摄出A点的位置,可在A点处贴上标志物.

图3 整体实验装置图
测量装置由高速摄像头和计算机组成,其中计算机包含自主设计的测量程序,图4为测量程序的基本流程图,流程图具体内容如下:
1)获取图像
利用高速摄像头实时采集小球的图像并传输给计算机.
2)图像预处理
调节图像的灰度与亮度,减少摄像机抖动、环境光强变化等因素对摄像头捕捉小球运动轨迹的影响.
3)轨迹追踪
在预处理后的图像上选择小球为追踪目标,用MS算法依次迭代定位追踪,得出小球运动轨迹以及小球在y轴方向、z轴方向的相对位移随时间t变化的图像.
4)测量重力加速度
将所得轨迹与定点A的坐标进行分析处理得出圆锥摆摆角的余弦值cosθ;在y-t曲线上选择n个周期取平均,即可得出小球的运动周期T,再利用式(6)即可得出重力加速度g.
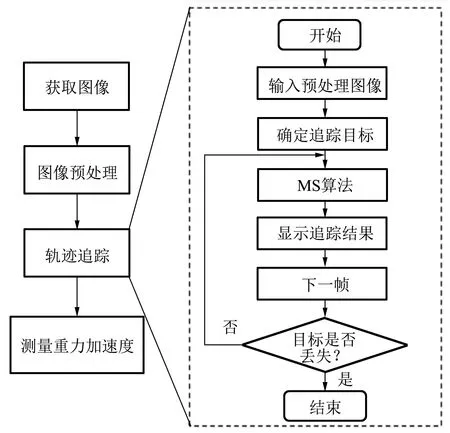
图4 测量程序基本流程
通过轨迹追踪程序可以直观清晰地显示出小球的运动轨迹,方便调节驱动电压来控制小球做匀速圆周运动.利用图 3中A点、小球轨迹上B点与C点来测量摆角余弦值cosθ,并且分析小球的y-t的图像得出小球的运动周期T,从而代替人工计时来减少测量误差.总体上,该装置结构简单,具有准确性高与稳定性好等优点.
3 实验结果
本实验中小球直径d=1.538 cm,绳子的长度l=23.06 cm.
3.1 确定驱动电压
为了确保小球在运动的过程中没有滞后现象、减弱空气阻力的影响,需要通过调节驱动电压让转轴有合适的转速来驱动小球做平稳的匀速圆周运动.让摄像头处于xOy面的正下方来捕捉小球的相对运动轨迹.
将所测得的相对运动轨迹y-x曲线、x-t曲线以及y-t曲线分别通过圆函数、余弦函数以及正弦函数进行拟合. 拟合结果展示:当驱动电压为2.1~2.7 V时小球可以做平稳的匀速圆周运动,其中2.4 V最为合适. 表 1为驱动电压为2.1~2.7 V时小球相对运动轨迹拟合数据.

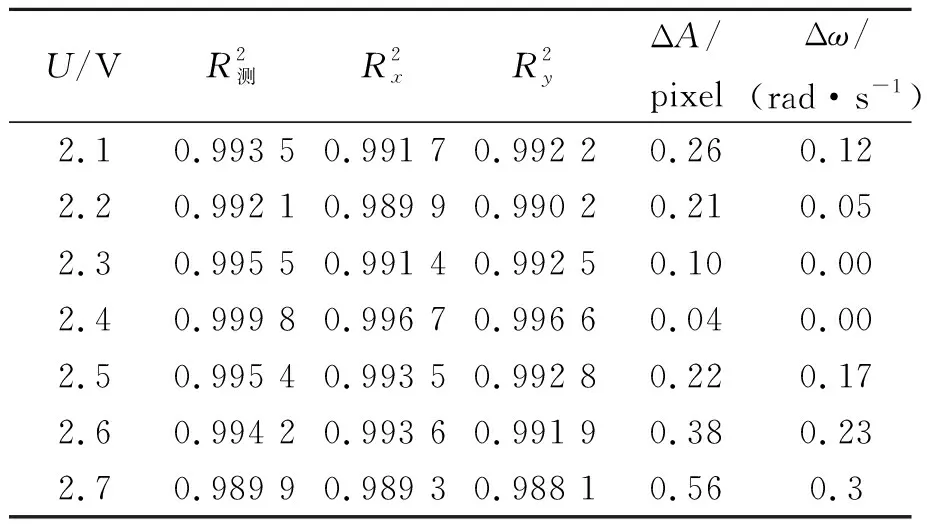
表1 小球相对运动轨迹拟合数据
图5所示是驱动电压为2.4 V时小球在xOy面上的相对运动轨迹.图6、图7分别为小球在x轴方向上的x-t曲线和y轴方向上的y-t曲线.图5~7说明在驱动电压为2.4V时,小球在做较为严格的匀速圆周运动.
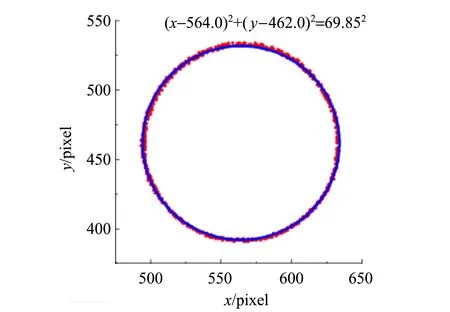
图5 小球的y-x曲线

图6 小球的x-t曲线

图7 小球的y-t曲线
3.2 测量小球的运动周期
电源电压调节为2.4 V,驱动小球做匀速圆周运动. 调整摄像头和xOy面共面,获取图8~9所示的小球在z轴方向、y轴方向的相对位移-时间关系图,其中Δy=153 pixel,Δz=4 pixel,Δy≫Δz,因此可以看成摄像头和xOy面共面.取小球在y轴方向上的关系曲线,在如图10所示的测量面板上选定4个周期取平均,即可得出小球的运动周期T=0.963 8 s.
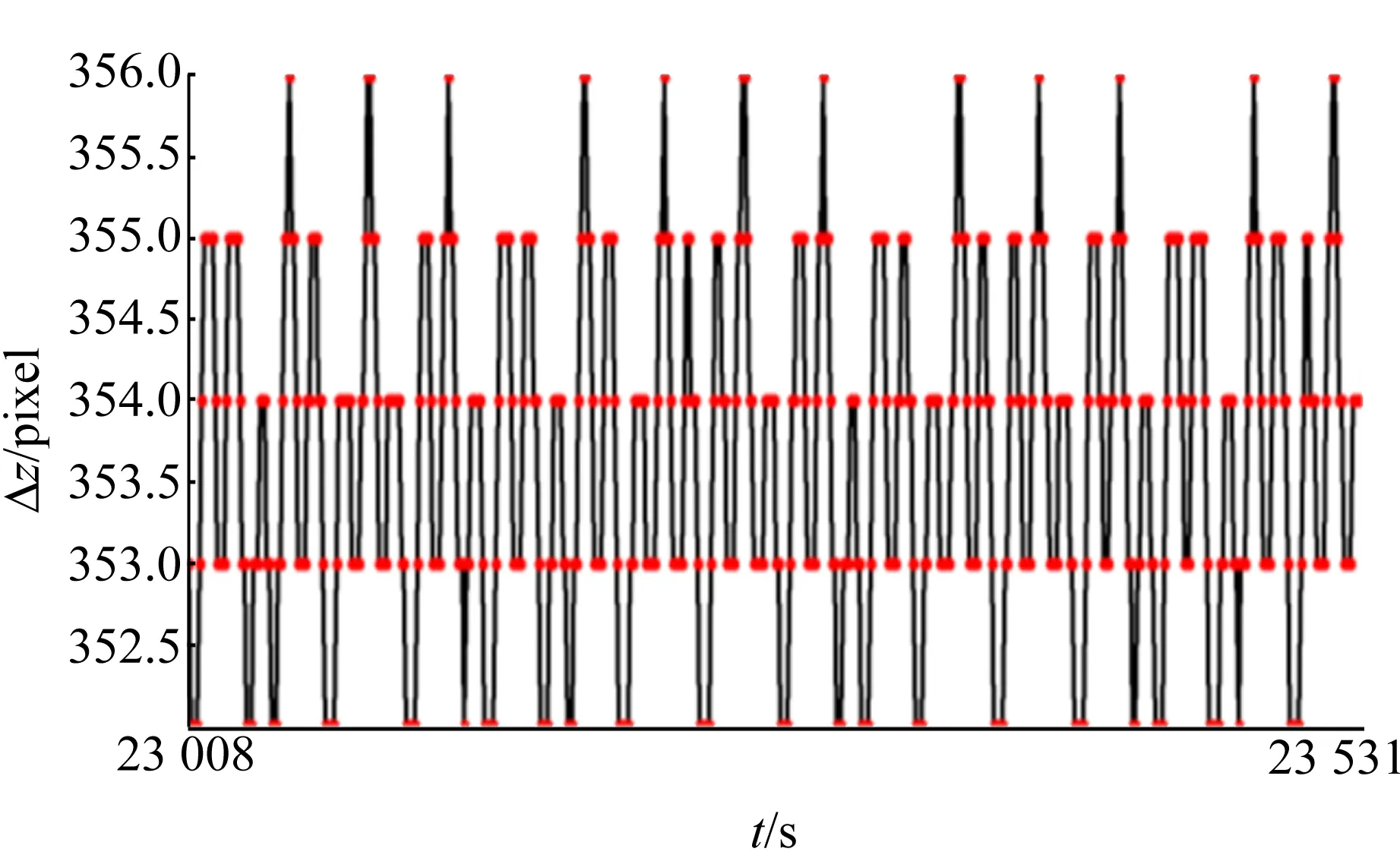
图8 小球在z轴方向相对位移-时间图

图9 小球在y轴方向相对位移-时间图

图10 y方向测量面板图
3.3 测量圆锥摆摆角的余弦值
沿竖直方向升高摄像头直至摄像头处于圆锥摆正前方,获取小球轨迹图及定点A的坐标,如图 11所示,利用程序计算出cosθ=0.969 4.

图11 余弦值测量面板(正前方拍摄)
为了探究测量摆角余弦值cosθ时,摄像头处于不同位置所带来的误差,实验测量出当摄像头和xOy面共面时定点A的坐标和小球的运动轨迹.得到的A,B,C三点如图 12所示,计算出cosθ′=0.969 8,若以cosθ为参考值,算得相对偏差为0.04%.

图12 余弦值测量面板(xOy平面拍摄)
3.4 测量重力加速度
由3.1的探究结果显示:当d=1.538 cm,l=23.06 cm,驱动电压为2.4 V时,小球做较为严格的匀速圆周运动.在此条件下,实验所测广州的重力加速度如表2~3所示.

表2 重力加速度测量数据

表3 重力加速度测量结果
由表中数据可得出广州的重力加速度g=(9.812±0.016) m/s2.
4 结束语
本文提出了将轨迹追踪技术与圆锥摆相结合的方法,控制小球做较为严格的匀速圆周运动,从而精确测量出重力加速度. 利用该方法来测量小球运动周期避免了人工计时带来的较大误差;摄
像头测量圆锥摆摆角余弦值的相对误差也较小. 结果表明在驱动电压为2.4 V时小球能做较为严格的匀速圆周运动,所测得的重力加速度相对偏差在0.5%以内. 本文所提方法具有操作简单、测量结果精确等特点.
