基于CSI动态参数优化的人体轨迹追踪
2023-01-31陈琳琳冯秀芳
陈琳琳,冯秀芳
(太原理工大学 软件学院,山西 太原 030024)
0 引 言
轨迹追踪在老年人健康护理、安全检测以及智能家居方面发挥着重要作用,而现有的轨迹追踪技术大部分依靠多个收发器采集数据,如Widar[1]、DynamicMusic[2]等,不能更好服务于家庭、办公室等单链路场景。对此mD-Track[3]和Widar2.0[4]提出基于单链路的被动轨迹追踪,通过融合多维度信息和多参数联合定位来进行定位追踪。这为基于单链路定位技术提供了理论支持。追踪技术主要通过捕捉目标反射信号来提取位置信息,但是相比较静态反射信号而言,目标反射信号较弱,这使得捕捉目标信号较为困难。而现有的技术中都存在目标参数提取工作量大和计算时间较长的问题。为解决现存在的问题,本文设计了JDP(联合动态参数)算法,该算法通过使用带通滤波器调整信号频率去除静态信号,将得到的信号进行分解得到所需要的参数信息,如果使用穷举法来分解每一条路径将会使计算复杂度增加,为此使用SAGE(空间交替广义最大化)算法来对信号路径迭代搜索,减少搜索空间将得到所需要的信号路径。由于所得到的参数含有大量的无关参数,所得的参数并不能直接用于定位追踪,因此需要在众多参数中选取可以用于定位的目标参数。利用人体移动会使得信号产生多普勒频移来强化动态参数特征,以此方便目标参数的提取。
1 WiFi定位原理
人体的运动使得WiFi信号传播路径变化,CSI可以表示信号变化信息,通过CSI分析得到反射路径参数信息,进而通过参数信息进行人体定位及轨迹追踪。
1.1 信道状态信息
CSI是描述物理层特性的信道响应信息,使用正交频分复用技术(orthogonal frequency division multiplexing,OFDM)可以得到WLAN网络中的CSI,CSI静态时相对很稳定,动态时通过2.4 GHz无线网络的30组子载波幅度和相位详细的描述了物理层状态信息,较为灵敏地反应了室内无线环境的变化情况,人体在室内运动时会影响到CSI的变化[9]。CSI是由信号传输的多径效应产生,因此可以由时间t频率f和接收器的天线s表示如式(1)所示

(1)
其中,L是多路径的总数,Pl是l条路径的信号,τl为路径的传播因子,α为复衰减因子,N是捕捉的背景噪声和高斯白噪声。
1.2 CSI参数定位原理
由于人体的运动会使得信号传输路径发生变化,进而引起WiFi信号的变化,使得信号内的参数飞行时间(time of flight,TOF)、到达角(angle of arrive,AOA)和多普勒频移(doppler frequency shift,DFS)发生变化,而CSI描述信号的变化信息,即信号的衰减、偏移以及相位的变化。通过CSI可以分析出信号的传输路径,分析路径的信息得到该路径的参数,参数代表意义如图1所示。通过多维参数估计算法来进行多个路径的参数估计。通过提取的参数估计来进行三角定位,得到定位目标。
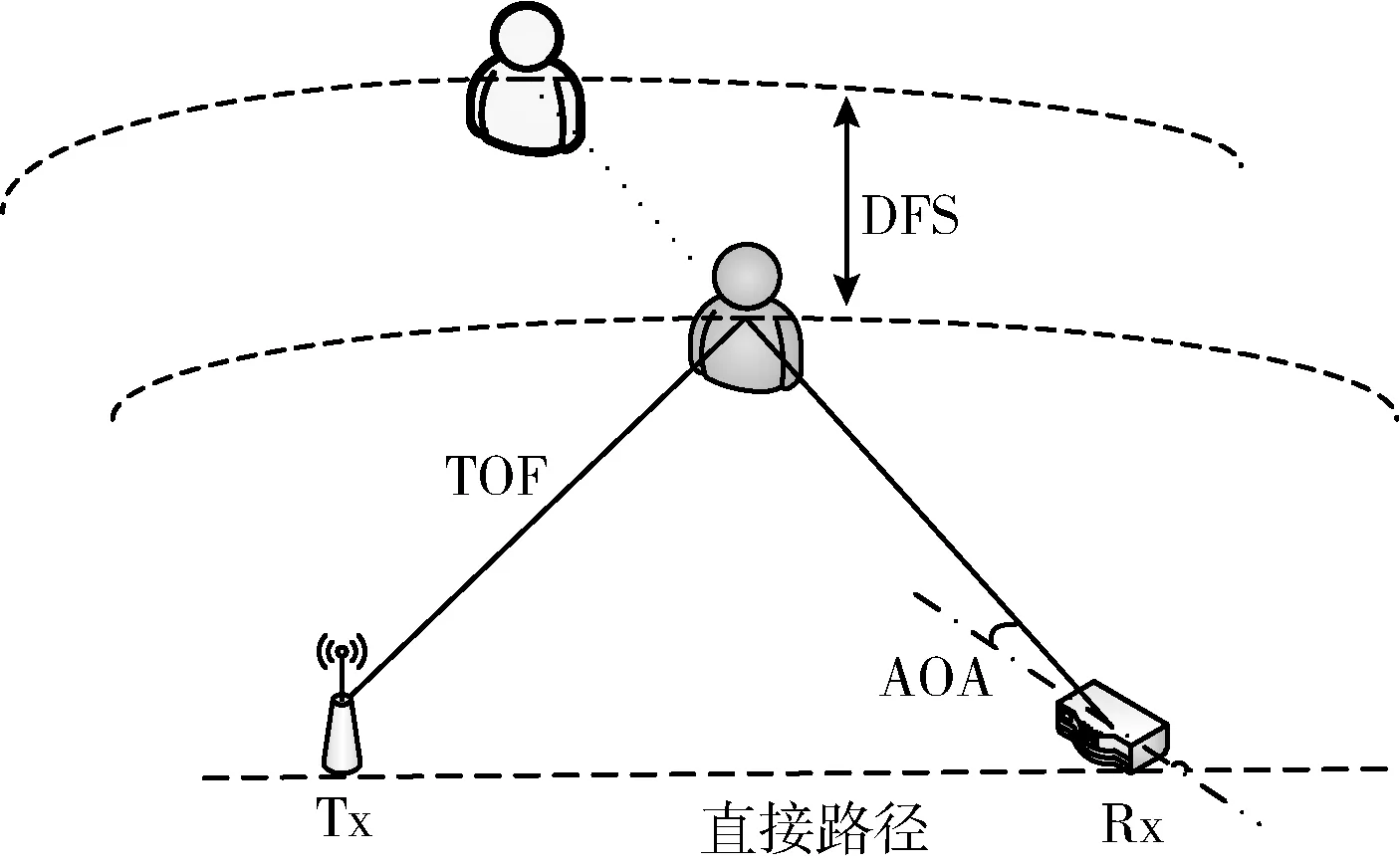
图1 参数意义表示模型
在得到了定位所需的参数AOA、DFS以及TOF后,以及知道收发器所在的位置,可以定位到移动目标所在的位置。通过TOF乘以光速即可知道信号从发射端经过人体反射到接收端传输的路径,将接收器和发射器作为椭圆焦点即可求知人体所在的椭圆线。设人体所在的位置为l(x,y), 接收器的位置为lr(xr,yr), 发射器所在的位置为lt(xt,yt), 根据已知信息构成方程组(2)
(2)
其中,φ为接收器天线阵列的取向角,可由接收器和发射器的位置计算得出,而Θ为参数提取出来的入射角AOA,其中d为信号由发射器出发经过人体反射到达接收器的路径,通过此路径以收发器为焦点,可定位人体位置所在的椭圆,由AOA即可进一步定位人体具体所在位置,如果确定人体在链路具体一侧即可得到唯一解,由式(2)可解的人体目标位置。
为此本文是分析CSI数据得到动态人体反射路径的参数。为满足单链路场景的轨迹追踪,数据为单条链路场景下的采集。
2 JDP设计
本文提出使用JDP算法,本算法主要是使用单条链路采集的CSI数据,并对数据进行降噪和滤波处理,通过使用极大似然多参数估计对处理后的CSI数据进行分解,通过空间交替广义期望最大化(space alternating generalized expectation maximization,SAGE)算法来减少空间搜索量,然后得到多维路径多参数,进而使用得到多个可以对人体进行三角定位。数据处理是通过共轭乘法来去除同位相位噪声,使用带通滤波器滤除静态路径信号减少参数的提取,提出联合多普勒频移来进行有效参数的选择,减少计算量的同时细化人体定位。最后把每个时间戳得到定位结果连接成人体运动轨迹。
2.1 算法设计流程
JDP主要研究的内容是通过静态信号滤除减少参数的提取,以及使用共轭乘法来消除随机相位噪声,在参数提取完成后根据人体移动产生的DFS来加强动态参数特征,简化动态参数的选择。为使得定位系统可以适用于单个链路的场景,首先在单个链路场景下对CSI数据采集,由于原始CSI数据包含大量的相位噪声,为提高参数提取的准确率需对数据进行降噪处理,且在室内复杂环境中,采集的数据中包含大量的由其它静态物体反射的静态信号,为减少无效参数提取,使用滤波器滤除静态信号。进而对多维路径参数估计,从CSI数据中提取出经过物体反射多条路径的AOA、DFS和TOF多种参数。在得到的参数中包含了大量由其它静态物体反射产生的无效参数,而在定位中需要提取由人体反射路径的参数才可进行定位,由于人体的移动会使得信号传播路径产生DFS,因此本文重点为根据此特征来提取有效动态参数。具体设计流程如图2所示。
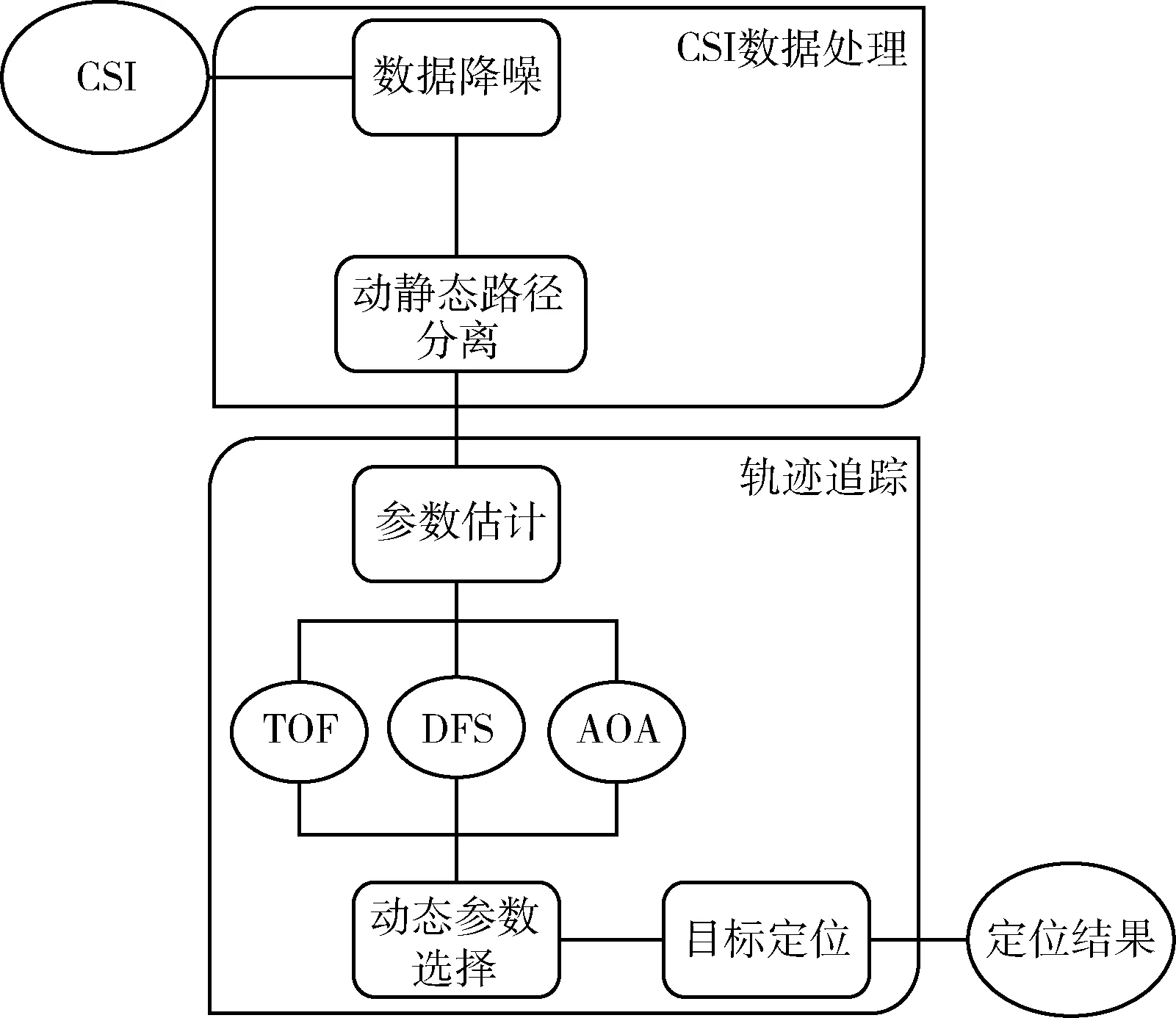
图2 定位设计流程
2.2 数据预处理
在人体移动时,信号传播路径发生变化,且信号传播会受到硬件设备以及环境污染直接从原始CSI数据中提取参数是误差较大,由于同一天线阵列具有相同的相位噪声,且除人体反射信号外,还有环境影响的静态路径,在不去除静态路径的情况下,得到的无用参数较多不利于目标参数的提取,因此本文根据噪声的特点使用共轭乘法去噪,再根据动静态信号之间的差异进行动静路径分离来减少参数估计的数量。
2.2.1 数据降噪
因为现有WiFi硬件设备的影响,会对CSI测量时造成严重的载波频率偏移和时间延迟导致严重的相位噪声。但是由于其只会造成时间和频率的延迟,使其在空间上不会发生变化。由于同一接收器上的同位天线有相同的信道相位噪声,根据此特点可通过共轭乘法去除随机噪声,使所得到的CSI的共轭相乘版本不受到相位噪声的污染,再进行参数估计时可提高其准确率。因此在得到CSI的测量值时使用共轭乘法来得到无偏移形式的数据。由接收器测量得到的CSI为H(m) 其中m表示为m=(i,j,k),i为数据包的数量,j为子载波的数量,k为接收器天线的数量,其共轭乘法为式(3)
C(m)=H(m)*H*(m0)
(3)
其中,m0=(i,j,k0)。 同一传感器上不同的天线经历相同的信道噪声,不同天线之间进行共轭相乘去除噪声。
2.2.2 动静态路径分离
当信号从发射器经过多条反射路径到达接收器,信号传播路径如图3所示,信号从发射器经过人体和其它静态物体反射到达接收器,接收器得到原始CSI数据中含有大量的噪声和不感兴趣的原始静态信号(Ps),而感兴趣的信号是由人体移动反射的动态信号(Pd)在通过使用共轭乘法去除噪声后的CSI数据可用动态信号和静态信号表示如式(4)所示
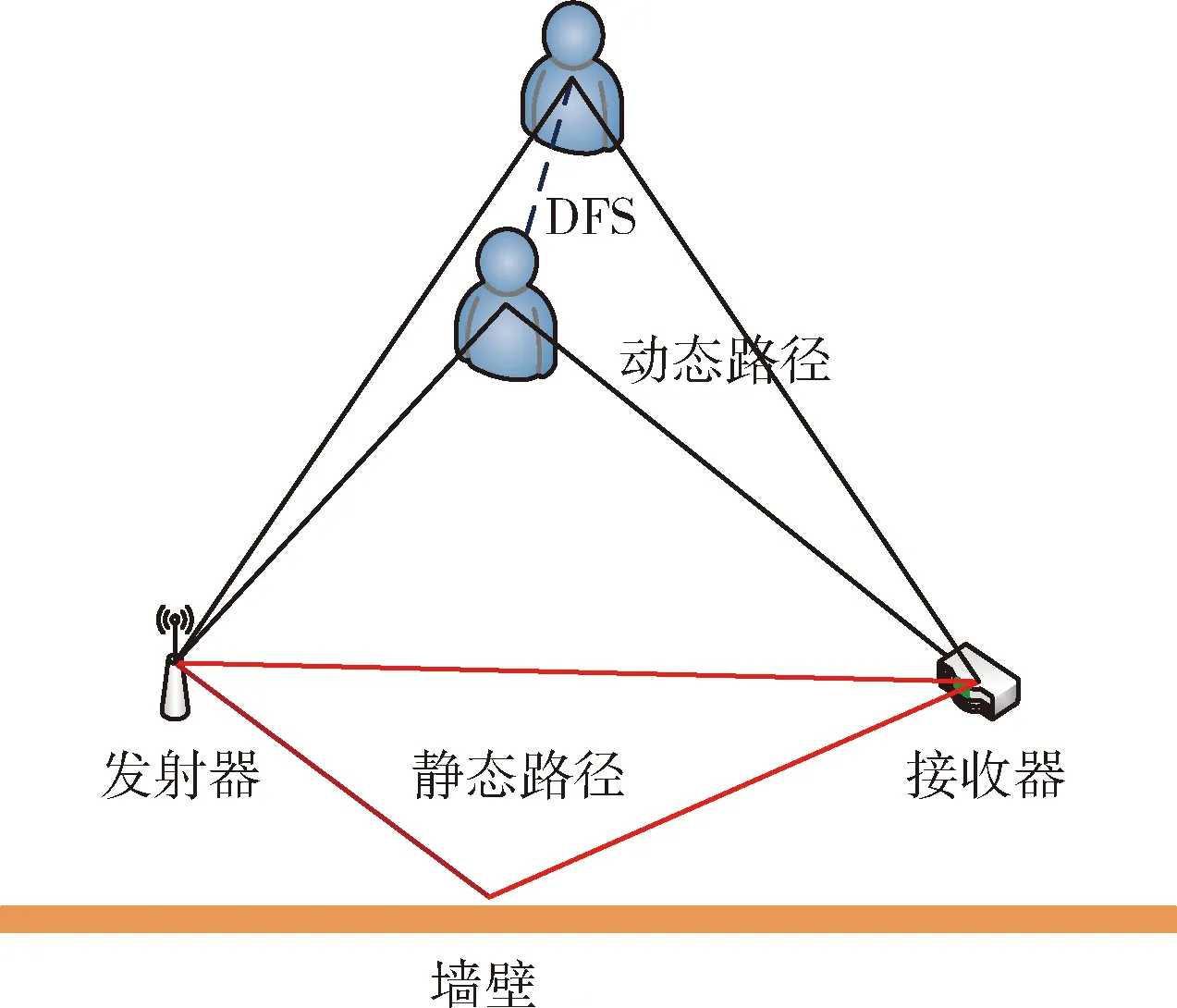
图3 信号反射路径

(4)
在式(4)中所需要的是第二项求和式,然而第二个求和式中第二项包含由共轭乘法计算得到的虚假信号,第一个式子为静态信号且较强,且不随时间变化。
由于带通滤波器可以允许特定的频段波通过,同时屏蔽其它频段的信号,因此更适合于求解式(4),得到需要的频段信号。在去除信号频率最高最低的部分,去除频率较高的去除第一项和较弱的第三项,使其通过的频率为2 Hz~175 Hz,通过振幅和频率调整,使得留下中间频率可以得到Pl1(m)*Pl2(m0), 得到数据信号处理结果如图4、图5所示,在调整后的可在此基础上进行参数估计得到TOF和AOA等参数。
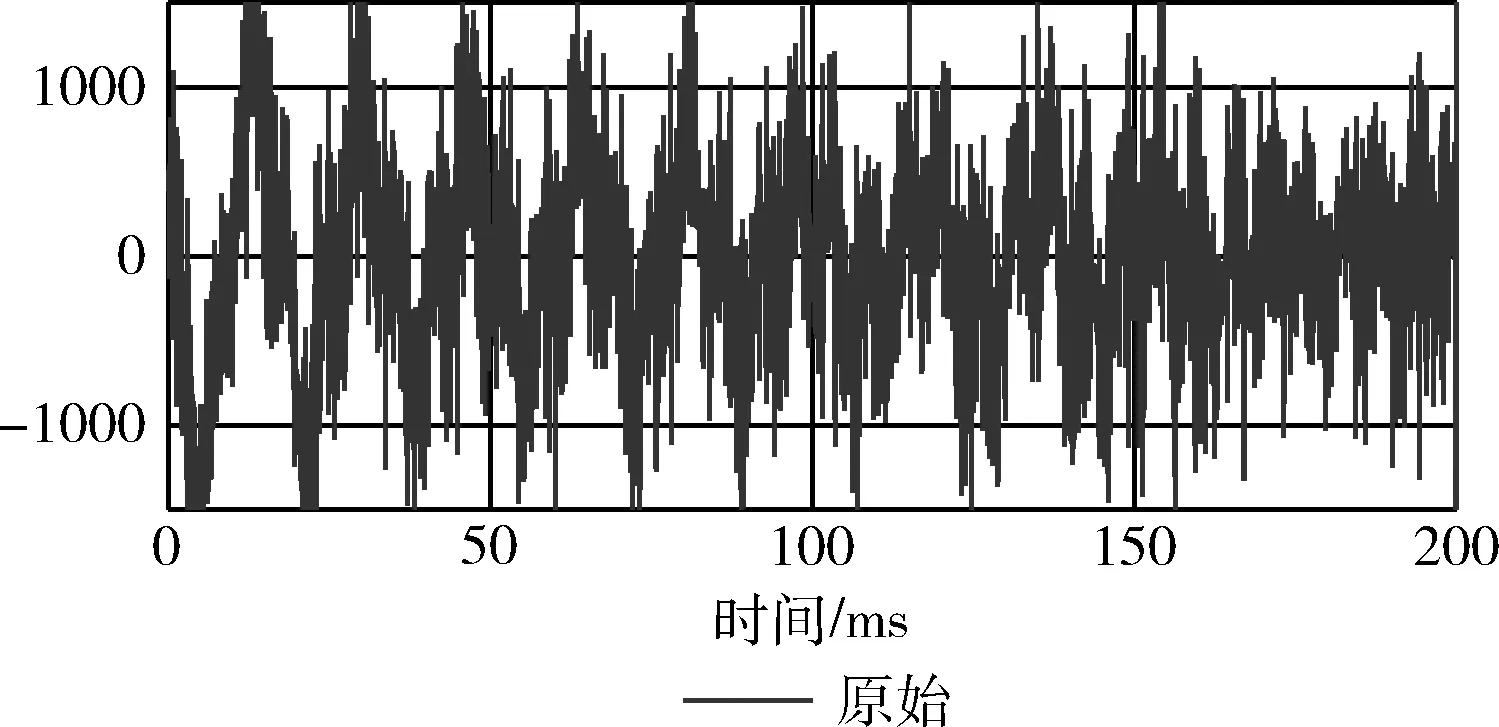
图4 原始信号
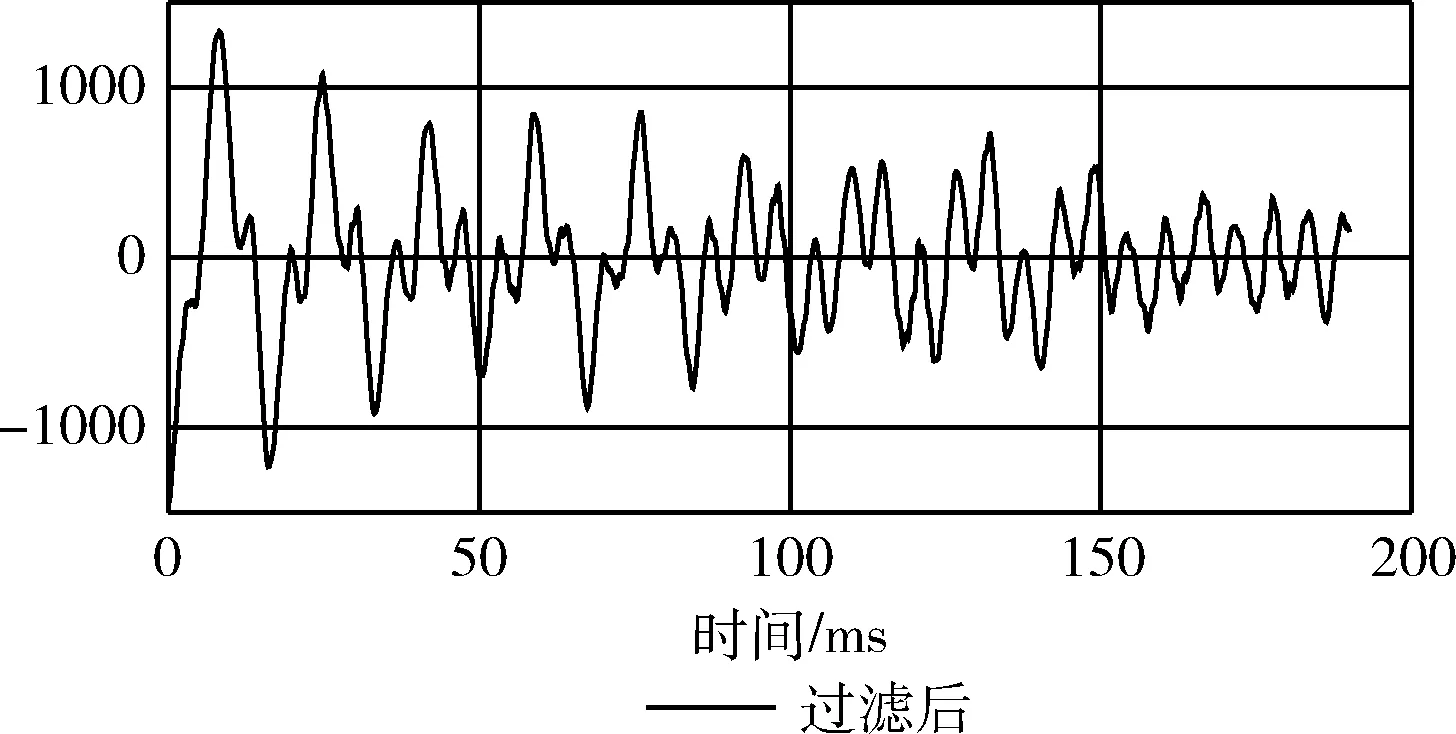
图5 处理后信号
2.3 轨迹追踪
本文通过提取的参数来进行三角定位,即使经过数据处理减少了大部分提取的参数,参数中仍然包含大量的无效参数,因此在本章节主要研究从提取的参数中选取有效动态参数来进行定位。
2.3.1 参数提取
(5)
该算法不同于以上的两种算法,可以更好估计同一信号的不同路径的所有参数,可以更好捕捉动态路径。为得到极大似然估计的参数即Λmax=argmaxΛ(Θ,h), 由于其是非线性函数,在求解时空间搜索复杂,因此使用广义空间交替最大化(SAGE)算法,来减少搜索空间。该算法是期望最大化(EM)的拓展,每次迭代每条路径的单一参数,不会影响其它参数的子集,且一次优化每条路径的参数。对于l条路径,通过分解CSI得到单一信号的第l条路径参数
(6)
其中,Θ′是上一次迭代的参数,βl是控制收敛速度的非负系数。参数估计算法步骤可如算法1所示。
算法1
输入:h(m)
过程:
(1)Initialize Θ=0

(3)Forl=1 toLdo
(4)Expectation step 式(6)
(5)Maximization step 式(7)
(6)End for
(7)End while

Maximization Step依次可执行为如式(7)所示

(7)
其中
(8)
从求解的αl可知,τl, Φl和fD为收敛函数,可在每次迭代后计算。从算法1可知,将参数Θ初始化为0,进行期望最大化迭代,通过设置一个阈值,当两次迭代结果小于设定的阈值时,结束迭代,若不小于设定的阈值则进行期望最大化步骤,得到差值在预定义的阈值内,进而参数估计得到所需要的参数。
2.3.2 动态参数选择
在第2.2.2节数据处理已经去除了一些静态信号,但是由人体反射路径信号较弱,在得到的多路径参数中还包含大量的其它物体反射的静态信号。静态参数由静态反射路径产生,而静态反射路径不会产生多普勒频移,由于由人体运动会使信号产生多普勒频移(DFS),基于AOA和DFS之间的关系来选择由人体运动反射路径得到的TOF以及AOA,即提出动态参数联合估计算法来对进行动态参数估计。如式(5)可知,所有反射路径可分解得到该路径的参数。在得到所有路径的参数时,根据动态路径特征结合DFS进行动态参数选择。
动态参数选择基本原理是分解一个时间戳内每一条路径得到每条路径的参数,从各路径参数中选择由于人体的移动产生的动态路径参数。由于人体移动会产生DFS,而其它静态反射路径不会产生DFS。根据此特点,可在产生DFS的反射路径上选择TOF和AOA。动态参数选择算法减少其它静态路径的选择,在动态参数选择方面通过联合DFS来减少参数的提取,且更准确提取由动态路径产生的参数。通过任意两条路径之间产生相似的DFS即任意两条路径的DFS之差小于一个特定值,则认为该路径为相似相关动态路径,对该路径参数进行提取保存,最后对提取的相似相关动态路径的参数进行拟合得到一个平均动态参数进行定位。动态参数提取算法步骤如算法2所示。
算法2
过程:
(1)Forl=1 toLdo
(2)Forj=l+1 toLdo
(4)Select Θj
(5)End If
(6)End For
(7)End For

由于动态路径可以为人体的胳膊、腿等多个部位产生多条动态反射路径,基于人体部位反射路径属于人体反射路径的一部分,人体各部位的反射路径具有相似相关性,即在每一个时间戳内相似相关的多条路径可以拟合为一条路径,得到每个时间戳的动态参数。算法2中Fitting Step中t表示为t时刻,l为该时刻的所有的动态路径数,得到每个时刻的动态路径所得的参数求取平均值,使其为该时刻的动态参数。通过使用本算法选取的动态参数,更准确提取动态参数。如图6和图7所示为一个时间戳内选择的TOF和AOA,图中所示参数为动态的路径的参数。
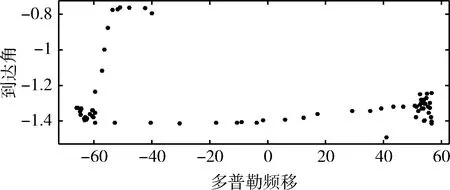
图6 AOA估计值
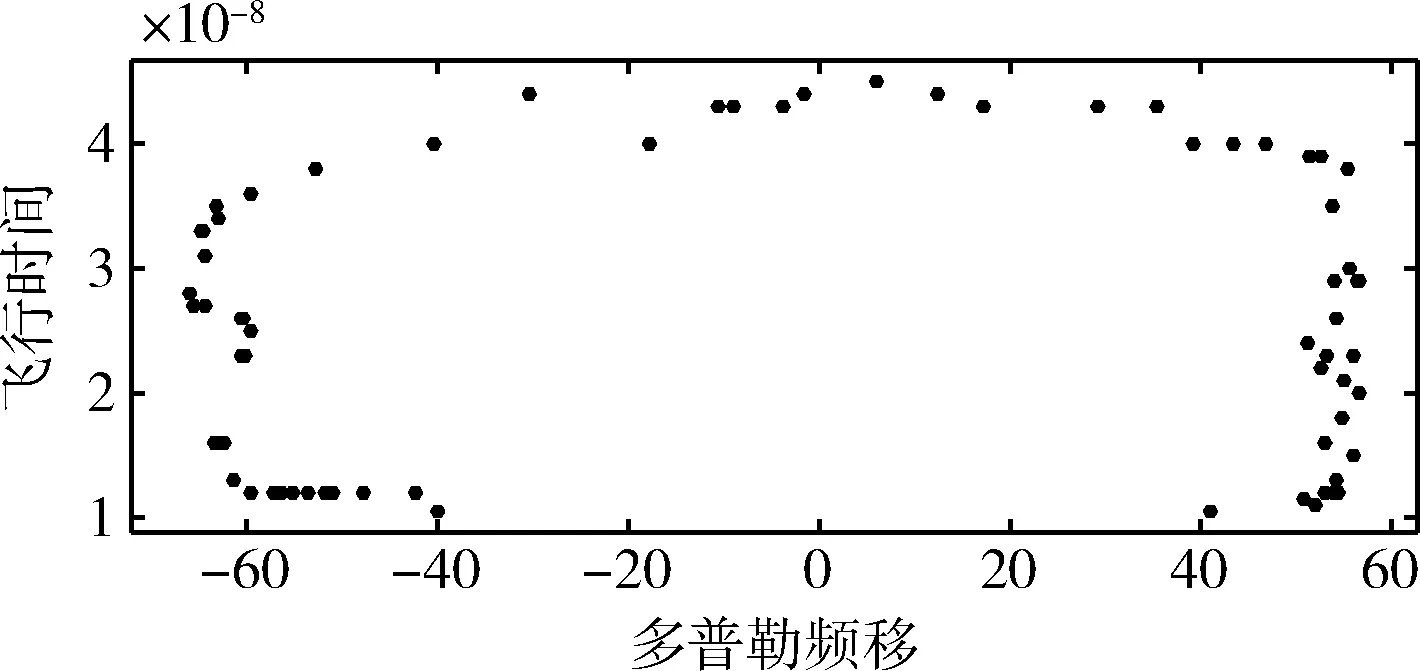
图7 TOF估计值
3 实验结果与分析
本实验在一对配备Intel 5300网卡的现成笔记本电脑来实现的,数据的采集通过一个装有Linux 802.11n CSI工具的设备进行采集CSI数据,通过发射器发射数据包,使用笔记本进行采集数据包来完成。并使用Matlab来进行数据处理和实现定位来完成实验。为模拟真实的复杂室内环境场景,通过在空教室、办公室以及走廊采集CSI数据进行实验,得到在同一场景下不同的轨迹的误差值。
3.1 环境因素影响分析
如图8所示是在不同场景下轨迹追踪图,其中*为人体真实行走轨迹,+为系统追踪轨迹,在走廊中,其中发射器的坐标为(0,0),走廊接收器的位置为(0,2.5)。在教室和办公室内接收器的位置为(0,3)。从空间角度分析教室相较于办公室空间较大,而走廊空间较小。就室内复杂环境程度而言,办公室相较于教室复杂度较小。各环境下数据采集场景如图9所示。
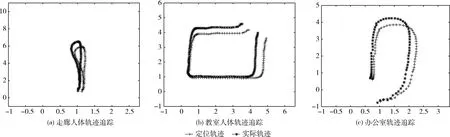
图8 不同场景下轨迹追踪
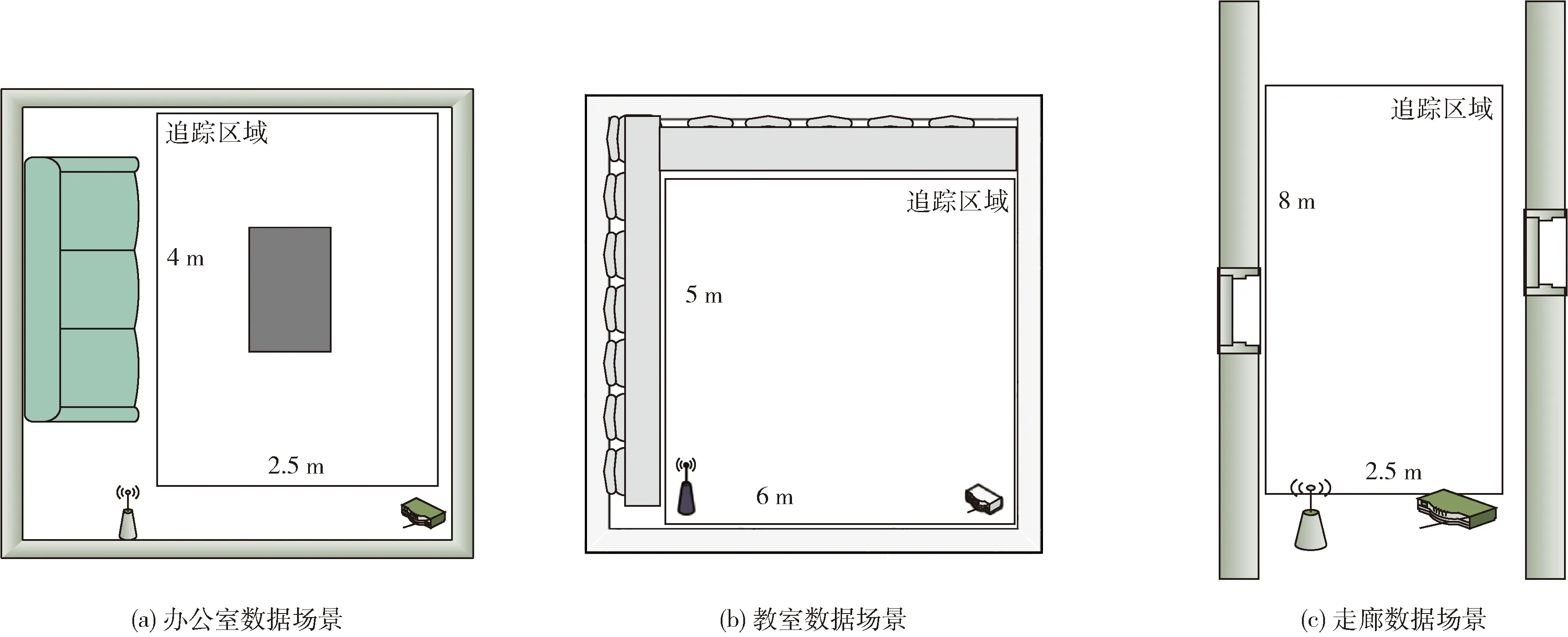
图9 环境数据采集场景描述
如图10所示的不同环境下的误差累计分布图分析,走廊在定位误差0.5 m以内分布高达0.85,而教室和办公室在误差为0.67 m才开始收敛。可见走廊定位效果优于教室和办公室。受空间因素影响,办公室和教室空间相对于走廊更大;受环境复杂度影响,教室内桌椅等物体对信号遮挡,且环境相对于办公室更复杂,不利于接收器对动态信号的采集,虽然环境复杂的场景相对于环境简单的场景误差较大,但定位误差差距很小。可见环境复杂度因素对该算法的定位效果影响较小。对于空间较大环境,信号从发射器出发经人体反射到接收器的距离较远,使得接收器接收困难,导致定位误差相比较更大。
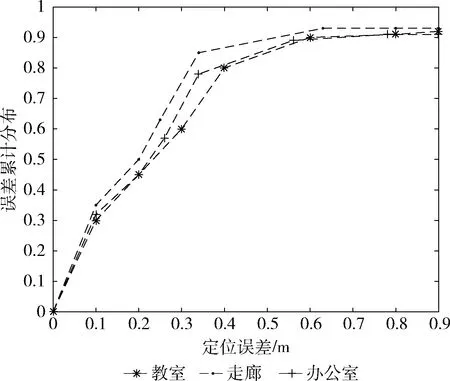
图10 不同环境下的误差累计分布
从实验结果分析,可见对于定位影响较大的因素为空间因素,空间较大的环境定位精准度较低。但是从其整体的误差累计分布图来看,各场景相差较小,可见环境因素对本定位技术影响效果较小。如表1所示不同场景下的各轨迹的平均误差值。从表1中可以分析知,在走廊进行定位时,不同轨迹的平均误差相比较于其它场景较小。可从实验结果得知,虽然环境会有一定的影响,但是其影响较小。所有场景下的误差平均在0.64 m。
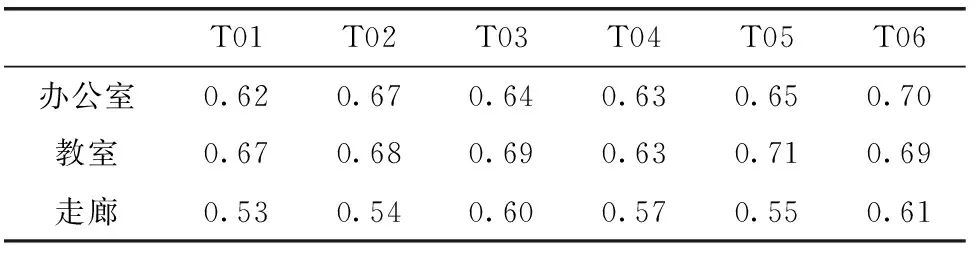
表1 不同场景下各轨迹的平均误差/m
3.2 定位仿真分析
本文旨在通过CSI的处理来减少对参数的分析,通过了解动态信号和静态信号之间的差异来进行静态信号的滤除,并且融合多普勒频移来增强有效参数的选择,提高有效参数的提取率。如表2所示本文使用JDP算法的参数选择数量相比于Widar2.0参数减少。通过减少无效参数的提取来增加有效参数的选择来减少了系统的工作量,提升了计算速度,见表3,JDP和Widar2.0的计算时间对比结果。该统计结果为在联想Core i5笔记本运算时间。可以从统计结果中看出JDP算法相比较于同为单链路多参数的定位算法Widar2.0在运算速度有较大的提升,且计算时间较为稳定。JDP的平均定位误差为0.64 m,而Widar2.0为0.72 m。定位误差在多参数单链路的系统中误差较小。

表2 Widar2.0和JDP单链路参数选择数量

表3 Widar2.0和JDP各轨迹计算时间/s
如图11所示,其横坐标表示人体到接收器的距离,单位(m)。相比较于单参数的Dynamic Music算法本文误差有所减少,定位精度有所提升,相比较于Widar2.0多参数的定位算法,在减少参数的同时并未使得定位精准度降低,相反精度有所提升,且远距离时精度较高。
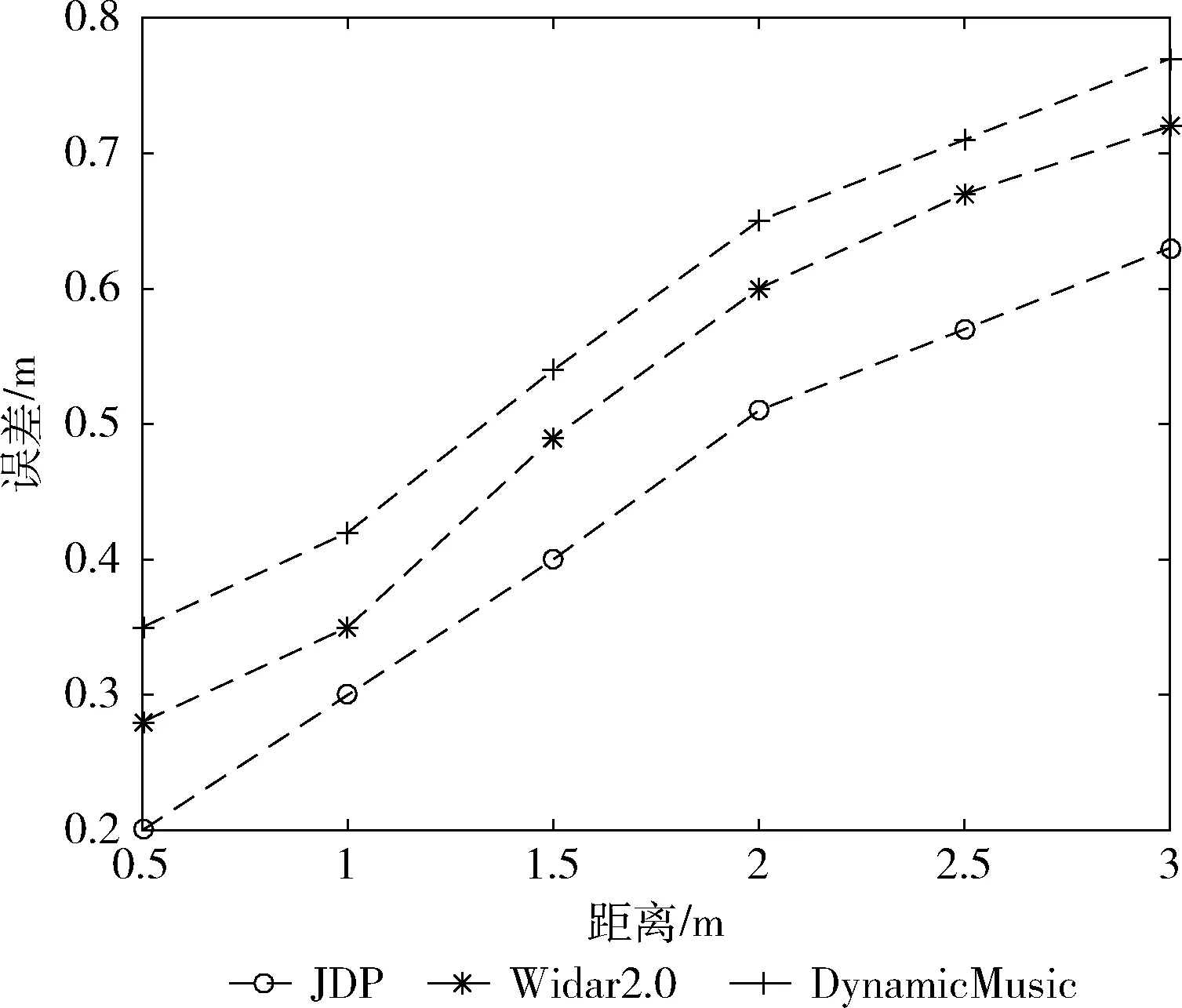
图11 不同算法定位误差对比
分别分析了JDP、Widar2.0和Dynamic的定位性能,以误差累计分布作为评估标准,如图12所示,从误差分布图可看出,JDP算法在较低的定位误差内开始收敛。
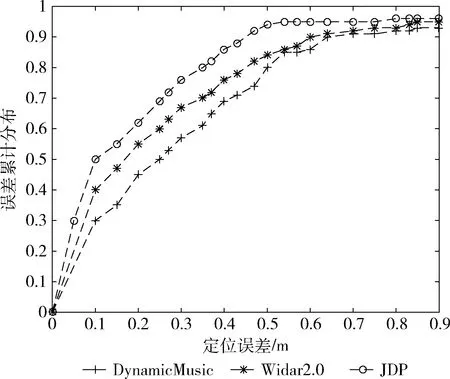
图12 不同方案误差累计分布
如图12所示,本算法在定位误差为0.55 m即开始收敛为0.9以上,而其它算法在定位误差为0.65 m和0.7 m后误差累计分布才达到0.9,可见本算法相对于现有技术有较高的准确度。
4 结束语
本文提出的JDP算法主要研究的是减少数据信号的输入量来减少参数的提取,根据动静态信号之间的差异来进行静态信号的滤除,在减少参数提取方面工作量的同时,根据多普勒频移加强动态参数特征,建立相似相关动态路径选择关系,简化目标动态参数选择过程。因此提高算法的运算速度,减少了运算时间。JDP算法和已有的定位算法相比减少了运算时间,提高了准确度。尽管如此,该算法只能应用于单人的定位与追踪,应用于多人轨迹追踪精准度较差,在接下来的工作中,打算根据采集到的动态参数的相关性进行分类,通过分类的数据组对多人体进行定位。
