基于INS/DVL/GPS的UUV组合导航技术分析
2023-01-10吕志刚
吕志刚
(1.中国船舶集团有限公司第七一〇研究所,湖北 宜昌 443003;2.清江创新中心,湖北 武汉 430076)
0 引言
组合导航系统可为UUV长航时水下航行提供精确的姿态、航向、速度和位置信息,精确的导航能力是 UUV任务完成和安全回收的一项关键技术。但由于受总体尺寸、重量、功耗等条件限制,水下环境的特殊性及隐蔽性等诸多因素的影响,实现UUV水下高精度导航仍然很困难,水下组合导航仍然是UUV所面临的主要技术挑战之一。
目前,单一的导航方式由于自身的不足,如单一的惯性导航系统和 GPS导航,已无法满足水下高精度的导航要求,而目前基于INS/DVL/GPS的水下组合导航方式为UUV通常采用的一种导航方式,可解决导航误差随时间积累的难题[1],满足UUV长航时水下航行的要求。
1 水下组合导航系统的结构和组成
水下组合导航系统一般由INS、DVL、GPS和深度计构成。深度计为可选择的配置,下潜深度在300 m以内的UUV可以不配置深度计。配置了深度计的UUV导航精度可以进一步提升,特别是天向速度和高程信息精度可以大大提升。下潜深度远大于300 m的UUV,一般要求配置深度计,以提高导航的精度[2-3]。水下组合导航原理简图见图1。
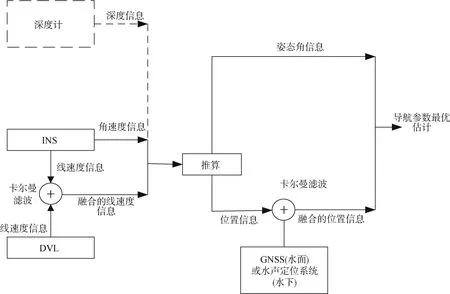
图1 水下组合导航原理图Fig.1 Schematic diagram of underwater integrated navigation
2 组合导航系统的关键技术
制约 INS与 DVL组合导航的因素有很多,DVL的测速精度和INS的姿态精度是影响组合导航精度的2个重要因素。通过DVL标定可降低INS与DVL之间的安装偏差对DVL测速精度的影响,从而提高系统的导航精度。对准精度和对准速度是惯性导航系统进行初始对准时的 2项重要技术指标,初始对准精度影响惯性导航系统的性能,为了提高惯性导航系统的性能,需要通过高精度的初始对准技术来保证系统的初始信息精度,尤其是初始姿态精度。
2.1 DVL标定
DVL测量得到的是DVL在UUV坐标系下的速度,它通过INS的姿态转换到导航坐标系下。在生产制造和安装过程中,很难保证INS的UUV坐标系与DVL的UUV坐标系完全重合。因此,若不进行INS与DVL的安装偏差进行标定,将产生一定的测速误差,从而影响导航的定位精度。由于INS的精度在很大程度上由器件决定,因此,提高INS与 DVL组合导航精度的主要途径在于提高DVL的测速精度。通过对DVL标度因数和INS与DVL之间安装误差的标定可提高INS、DVL组合导航精度,为了提高INS/DVL组合导航系统精度,国内外学者广泛关注了INS与DVL安装偏差的标定问题。最早的标定方法只考虑了 1个自由度,1989年,JOYCE提出了一种基于最小二乘的估计船载DVL航向安装误差的方法,该方法以GPS的速度作为参考来估计安装偏差[4]。对于DVL标定,国内通常采用 GPS辅助下的标定方式,国内学者对DVL安装偏差的在线估计也作了一定的研究,但是,由于水下航行器的机动性较小,也难以取得比较好的估计效果。
综上所述,DVL测速误差标定的难点在于水下航行器难以得到额外的速度、位置观测,且水下航行器机动性较小,为实现目标定位带来极大的难度。
2.2 INS初始对准
INS初始对准的目的是为了确定初始时刻的姿态矩阵。初始对准的精度对惯性导航系统的导航精度有着重要的影响,初始对准的时间在很大程度上决定了 UUV的快速反应能力,因此,对准精度和对准的快速性是初始对准最重要的2个指标。按不同的划分标准可以把INS的初始对准分为静基座对准和动基座对准。对于静基座对准技术,研究成果已经比较成熟,而动基座一直都是惯性导航学术界关注的热点。动基座对准包含2种情况:1)UUV受到机械振动、外界风力、浪涌等影响而引起的基座扰动;2)UUV在水面航行中进行初始对准。
一般来说,初始对准包括粗对准和精对准2大部分,粗对准过程是一个提供UUV坐标系和导航坐标系之间姿态矩阵初始值的过程。目前初始对准最常用的方法是惯性系粗对准法,该算法有一定的抗基座摇晃能力,适合于系泊状态下的航行器或舰船的粗对准。精对准则是利用外部观测量的信息,进一步得到UUV坐标系和导航坐标系之间姿态矩阵的精确值。典型的精对准方法有罗经法、DVL辅助下的UUV行进间罗经法、基于最优估计(常用卡尔曼滤波估计)的对准方法等。
3 导航系统算法
导航系统算法主要包括初始对准、DVL标定、纯惯性导航算法、组合导航算法和校准算法。
3.1 初始对准算法
初始对准算法有很多种,除了少数先进的对准算法,大部分初始对准都包含粗对准和精对准2个过程,最合适AUV的是惯性系粗对准和卡尔曼精对准算法。
3.1.1 惯性系粗对准[5-7]
惯性系粗对准过程采用晃动基座对准方式解算INS的初始姿态,姿态矩阵方程为

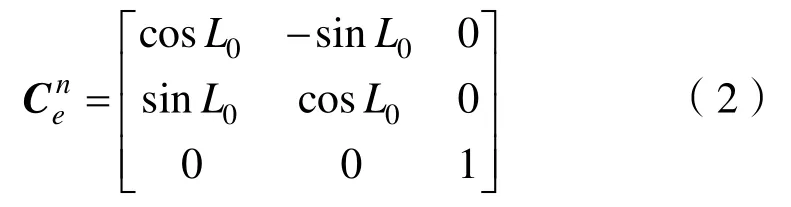
e系和n系的坐标转换仅与大地维度信息有关,从e系到n系的变换矩阵为公式(2),其中L0为大地维度。
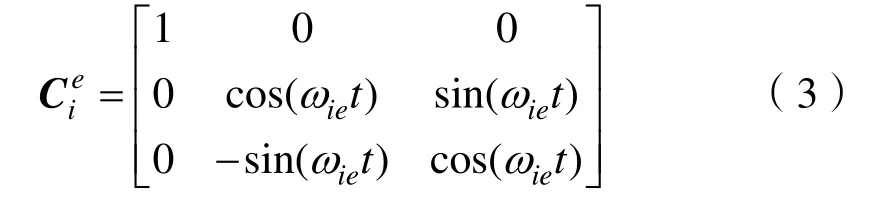
公式(3)为从i系和e系的转换矩阵,即e系相对于i系的转动,其中ieω为地球自转角速度。
3.1.2 卡尔曼精对准
选用常用的卡尔曼模型,状态变量选择为如下的15维列向量:

式中:δVE、δVN为速度误差;δL、δλ为纬度、经度误差;Eφ,Nφ,Uφ为姿态误差;xε,yε,zε为陀螺漂移;∇x,∇y,∇z为加速度计零偏。状态变量对应的高斯白噪声选为

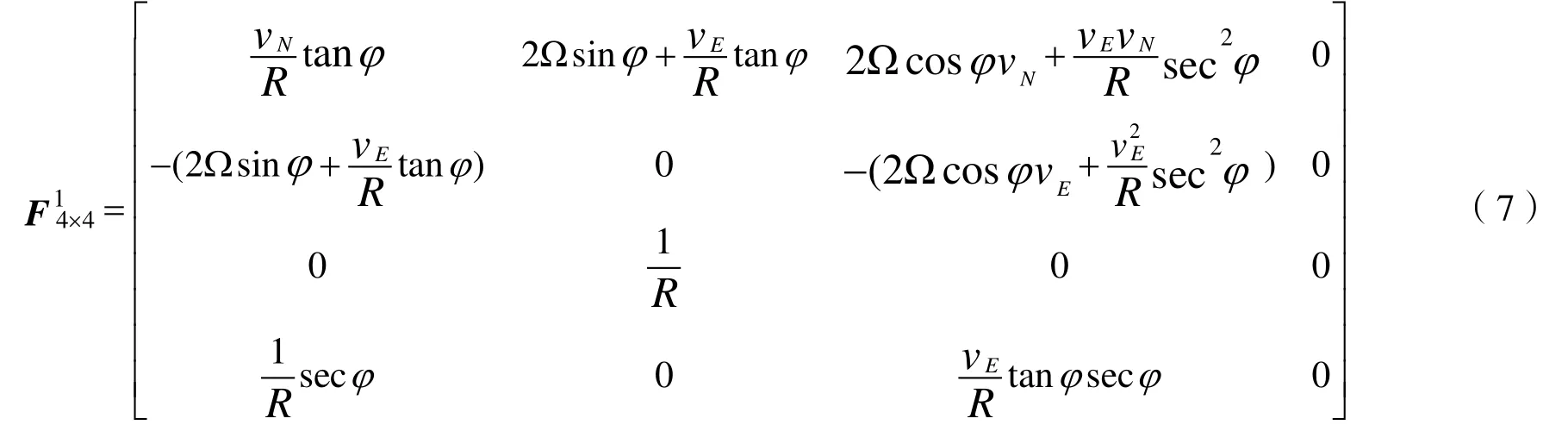
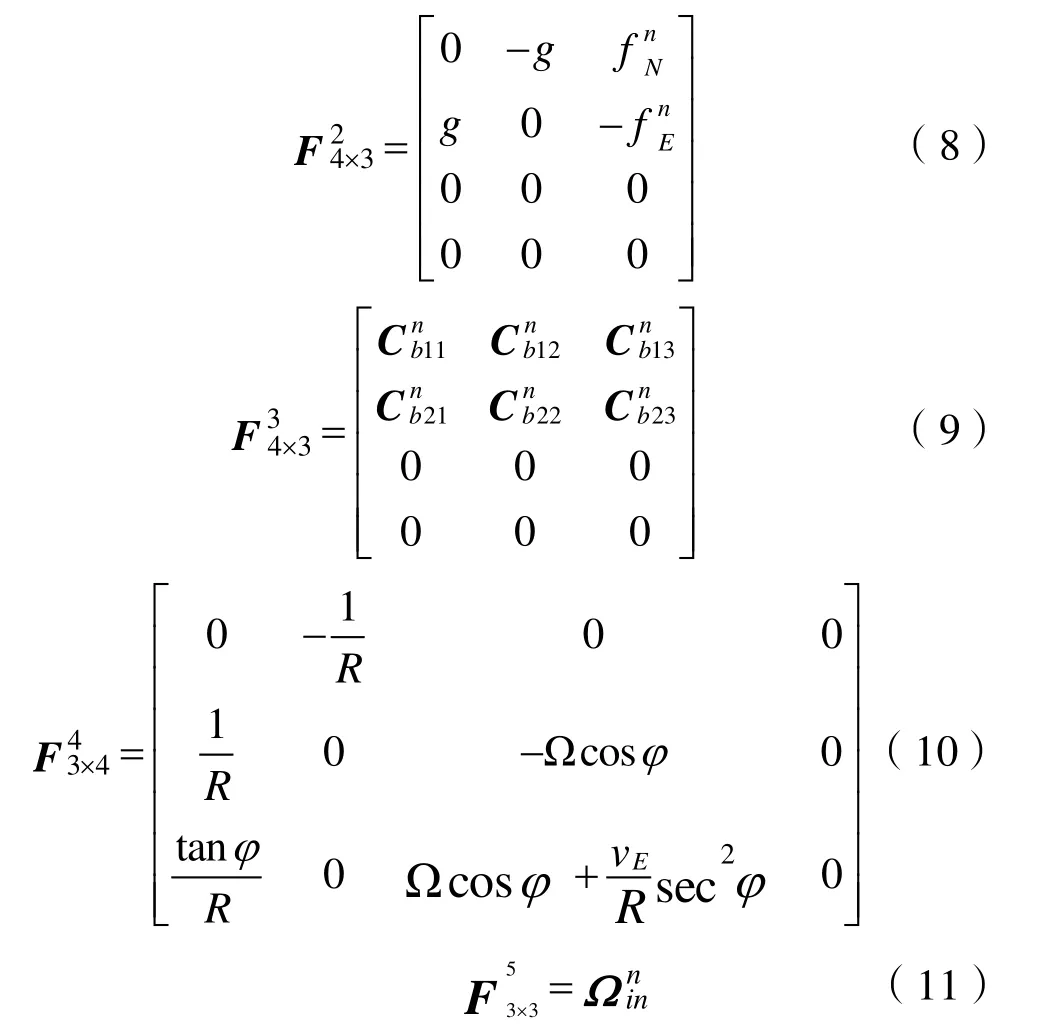
卡尔曼模型中的状态转移矩阵F如下:


卡尔曼模型中的X的噪声W前面的矩阵
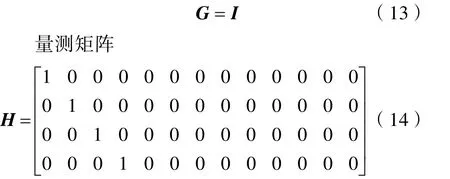
模型中量测量Z对应的噪声记为V,它是高斯白噪声。
模型中量测方程
以上就是卡尔曼精对准的全部计算公式,但精对准结束时刻,应该用卡尔曼滤波估计的误差修正纯惯性的计算结果,而不是直接用卫星定位装置或DVL的量测信息进行修正。因为前者不含噪声,精度较高,后者包含了一定的噪声,修正的效果不好。
3.2 纯惯性解算算法
纯惯性解算算法是利用惯性测量单元(IMU)的测量数据不断地推算UUV当前的姿态、速度和位置信息,包括姿态更新算法和速度位置更新算法2部分。
纯惯性解算算法的流程图见图2。
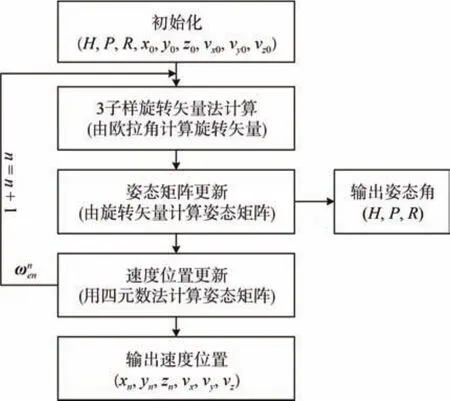
图 2 纯惯性算法流程图Fig.2 Flow chart of pure inertial algorithm
3.3 组合导航算法
组合导航算法是利用 DVL的速度信息进行组合导航,主要有线性卡尔曼滤波、非线性卡尔曼滤波与粒子滤波等,最常用的就是线性卡尔曼滤波法。
组合导航过程采用 Kalman滤波计算滤波模型。估算出误差以后,用纯惯性结果减去误差得到组合导航的结果。
在每个导航周期进行状态转移矩阵F的离散化计算,转移矩阵Φk,k-1计算如下[8-10]:

式中,T为导航周期。
当接收到有效的接收机信息时,进行 Kalman滤波计算,计算过程分为5步:

式中:为当前滤波周期的实时状态估计值;k/k-1为上一滤波周期对当前滤波周期的状态预测值;Kk为当前滤波周期的滤波增益阵;Pk/k-1为上一滤波周期对当前滤波周期的预测误差估计的协方差阵;Pk为当前滤波周期的实时误差估计协方差阵;Qk为系统噪声方差阵;Rk为量测噪声方差阵。
量测方程为
卡尔曼滤波算法流程如图3所示。
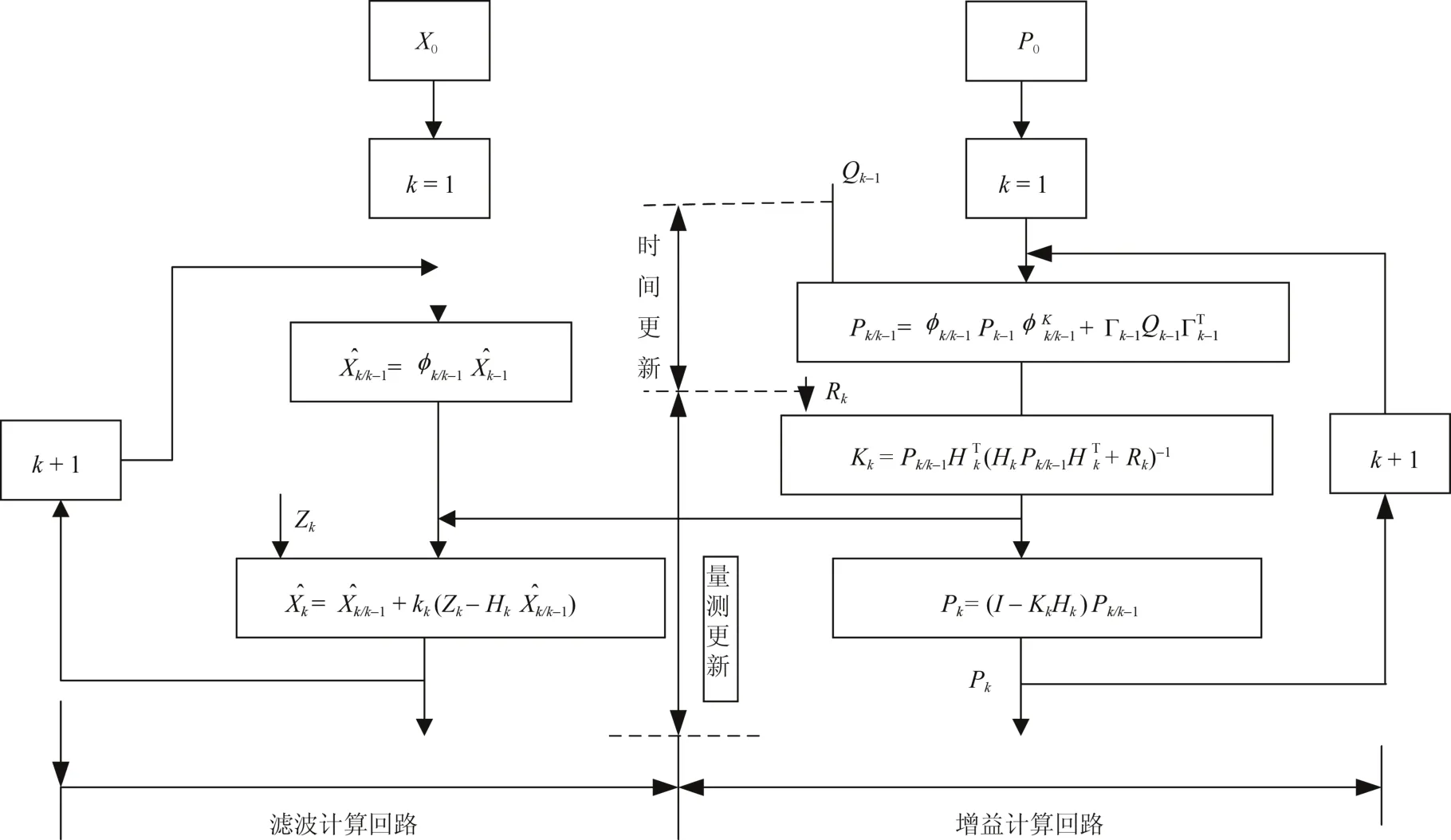
图 3 卡尔曼滤波算法流程图Fig.3 Flow chart of Kalman filtering algorithm
3.4 DVL标定算法
由于DVL与INS之间有安装误差,导致DVL测量的速度与INS需要的速度值不一致,需要标定出安装误差进行补偿才能够提高组合导航的精度。最常用的标定算法是两点法,利用起点和终点处的GPS信息进行航向角安装误差与标度因子这2个变量的标定。
3.4.1 基于卡尔曼滤波的标定方法
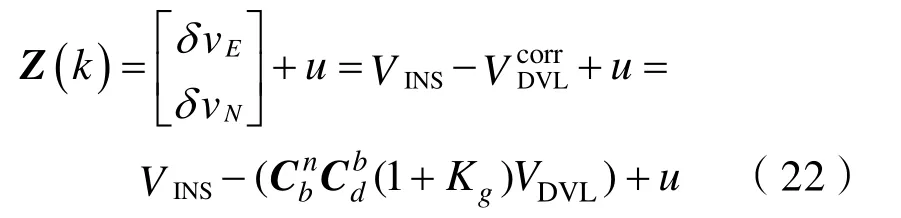
DVL输出的测量速度VDVL与INS组合导航所需要的速度vb之间的关系为[11]
式中:VDVL是DVL输出的自身坐标系下的原始速度数据;Kg是标度因数。
姿态矩阵为

式中,α、β、γ分别为俯仰、横滚、航向安装误差角。
标定算法数据传递关系图和标定算法流程图分别如图4和图5所示。图5中加入了反馈,这样即使设定的初始值偏离真实值很远,几步迭代以后也可以保证算法收敛。
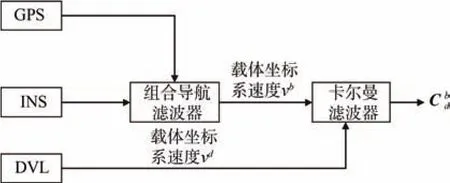
图 4 标定算法数据传递关系图Fig.4 Data transmission relation diagram of calibration algorithm
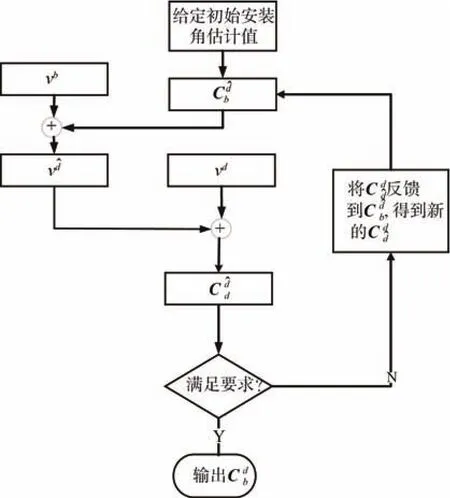
图 5 标定算法流程图Fig.5 Flow chart of calibration algorithm
标定完成得到标定参数以后便可以将VDVL转换为vn进行组合导航:

还可以改进卡尔曼模型,把速度标度因数Kg也包含进去,一起进行卡尔曼滤波估算。可以自行采用类似的方法进行推导。
3.4.2 基于航程起点终点位置信息的标定方法
利用一段直线航程(一般选为6 km或7 km为1个标准航程)的起点与终点 GPS信息可以进行DVL的标定,这种方式常称为两点标定法。此方法只需要 UUV在航程起点和终点处位于水面即可,其余时间UUV都可以在水下航行,标定方式更利于UUV的隐蔽。
这种标定方法的原理和计算公式十分简单,就是计算组合导航推算的直线航路、GPS起点与终点构成的实际直线航路之间的夹角和长度比值。
3.5 校准算法
校准是指当 UUV下潜前或上浮后接收 GPS(常用GPS和北斗等)的位置信息进行INS误差的估算与补偿。其本质就是基于 GPS位置信息的组合导航算法,只要对组合导航算法稍加修改就可以实现校准算法。
1)纯惯性导航时的校准。
卫星定位装置仅位置信息有效时,就用位置误差信息作为观测进行校准;卫星定位装置仅速度信息有效时,就用速度误差作为观测量进行校准;卫星定位装置的位置信息和速度信息同时有效时,就用位置误差信息和速度误差同时作为观测量进行校准。
2)组合导航时的校准。
不管 GPS的速度信息是否有效,都不用其速度信息,只用 GPS的位置信息得到的位置误差作为观测量进行校准。为了解决DVL组合模式切换到 GPS组合模式时卡尔曼滤波器的振荡甚至发散的问题,也可以采用校准时重启卡尔曼滤波器或替换法等技巧。当然,这种方法也会带来一些弊端,重启卡尔曼滤波器的缺点是卡尔曼重新收敛一般需要几分钟的时间;替换法的缺点是只对位置进行了校准,速度和姿态没有得到校准,组合导航精度不够高。
校准方式不限于如上2种,对于大深度UUV,位置信息还可能来自水声定位系统,考虑延时补偿后对大深度AUV进行校准。同时,还应该建立重力加速度模型考虑不同深度下重力加速度值的变化。校准算法的本质就是卡尔曼组合导航,所以校准算法的公式参考组合导航算法即可。
4 结束语
水下组合导航是UUV完成长航时水下自主航行和任务的技术保障和基础,而组合导航技术是提高 UUV导航精度的主要手段。本文章针对基于SINS/DVL/GPS的水下组合导航技术进行了分析,阐述了水下组合导航系统的关键技术,随后对初始对准算法、纯惯性解算算法、DVL标定算法和校准算法进行了详细论述,对水下组合导航具有一定的参考价值。