改进粒子群算法自抗扰控制在磁悬浮系统中的研究*
2023-01-07翟远盛王树贤
翟远盛,王树贤,李 亮
(江西理工大学电气工程与自动化学院,江西 赣州 314000)
磁悬浮技术利用磁场使物体悬浮,主要应用于开关磁阻电机、磁悬浮轨道交通、磁悬浮轴承中[1-3]。但如何设计控制器满足系统实时性、抗干扰性是一项挑战,许多学者对此进行了研究。在鲁棒控制设计中选择合适的加权函数,并结合离散数字控制,使磁悬浮系统具有快速响应性[4]。在PID控制中引入神经网络反馈补偿,提高了磁悬浮控制系统的动态性能和精度[5]。这些算法相对复杂,为此研究一种简单实用的控制系统是磁悬浮技术广泛应用的关键。
PID(Packet Identifier)控制动态性能受参数影响较大,当被控系统参数因环境改变时,需要调节PID增益。而自抗扰控制(ADRC)通过输入动态反馈线性化,使系统等效为串联积分控制,解决了PID控制的缺点[6-7]。自抗扰控制的实时估计扰动和快速补偿机制,使控制系统具有强鲁棒性、对环境具有很强的适应性,所以自抗扰控制应用于磁悬浮系统中具有超调小、相应快的控制品质。此外,自抗扰控制可用于速度跟踪、电机控制、滤波技术、伺服系统等方面[8-10]。但自抗扰控制参数众多,参数整定通常采取智能调节算法,如遗传算法、神经网络、自适应学习算法[11-12],这些算法具有一定计算量,需要良好的硬件支持。
实验采用单自由度磁悬浮球作为研究对象,对磁悬浮球系统进行建模分析,采用改进粒子群算法对自抗扰控制器参数进行优化,对系统抗干扰、跟踪能力进行测试实验并分析系统性能。
1 磁悬浮控制系统
1.1 磁悬浮系统原理
磁悬浮系统由电磁铁、光学传感器、驱动电路、控制器组成,结构如图1所示。电磁铁绕组中通入电流i产生电磁力F,当电磁力F与重力G相等时实现小球悬浮。由于电磁力与小球位置有关,外界轻微的干扰都会导致磁力的变化,要实现系统平衡需要对小球位置采取闭环控制。
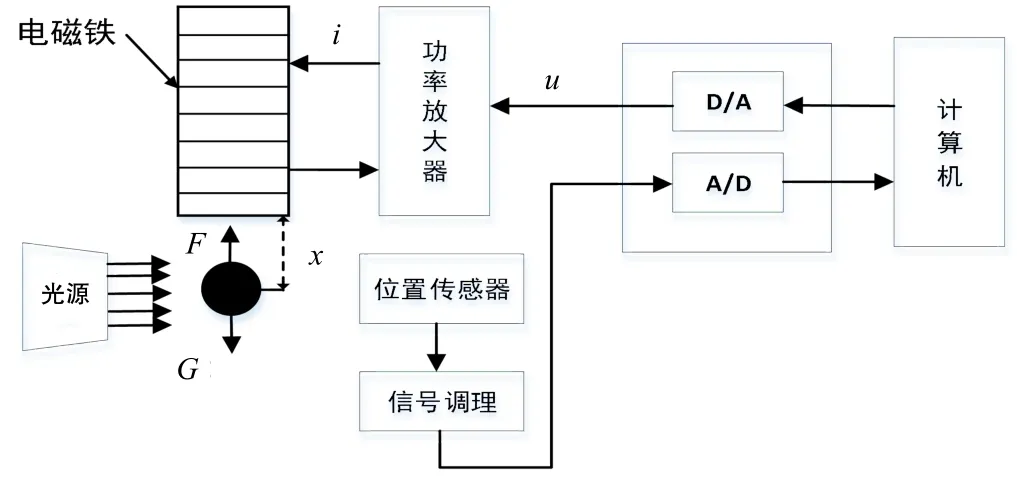
图1 磁悬浮系统结构模型
1.2 磁悬浮系统数学模型
实际控制中磁悬浮系统存在众多干扰。如电压-电流放大器的滞后时间、电源电压的波动、导线温度升高使电阻发生改变,这些因素是磁悬浮系统不确定的原因。由于控制器采用自抗扰控制技术,具有不依赖精确的数学模型,所以对磁悬浮系统进行建模有以下处理方法:①忽略磁悬浮系统因外界环境导致系统参数改变;②驱动电路滞后时间为微秒级,忽略电流滞后效应,对磁悬浮系统建立二阶系统模型。

由电磁定律和运动学方程得出以下系统方程:式(1)中:m为铁球质量;i为电磁铁绕组瞬时电流;x为小球到电磁铁表面的瞬时气隙;u0为磁导率;A为铁芯导磁截面积;N为电磁铁线圈匝数。
由磁悬浮系统方程知电磁力与气隙的平方成反比,是典型的非线性系统,运用线性理论对系统分析时,需要对模型进行线性化处理。设小球在工作点附近悬浮,将平衡方程F(i,x)+mg=0与式(1)联立,在平衡点泰勒展开,取输出量x和输入量U经Laplace变换计算出传递函数。
磁悬浮系统的物理参数如表1所示。

表1 磁悬浮系统物理量数值
将表1中的参数代入传递函数公式中,即:

2 自抗扰控制器设计
自抗扰控制技术不依赖系统内部结构,只需知道系统的阶数及系统的输入输出个数。由于磁悬浮系统是一个二阶非线性系统,选取二阶自抗扰控制器对磁悬浮系统进行控制。二阶自抗扰控制器由跟踪微分器、扩张状态观测器、非线性控制率组成,其结构如图2所示。

图2 自抗扰控制结构图
2.1 跟踪微分器(TD)
TD的作用是对输入信号进行过渡,同时又提取高精度的微分信号,离散TD方程如下:

式(3)中:T为积分步长;r为速度因子;h0为滤波因子。
r增加时减小信号过渡时间,反之则加大信号过渡时间。滤波因子h0增大,TD滤波效应越好,但不能过大,容易造成信号失真。
2.2 扩张状态观测器(ESO)
ESO实时估计系统内外总扰动,ESO方程如下:

式(4)中:fal函数为分数幂次函数。
由于分数幂次函数在原点斜率较大,为使系统在原点响应平缓,对原点附近进行线性化处理,fal函数表达可参见参考文献[6]。
2.3 非线性反馈控制率(NLSEF)
NLSEF由非线性函数组合,其原理方程如下:

式(5)中:e1、e2为系统误差和误差的微分。
fal函数具有小误差大增益的非线性函数,非线性函数的引入主要改善系统动态性能,解决超调和快速的矛盾。
3 粒子群算法
3.1 粒子群算法基本原理
粒子群算法(PSO)是一种靠粒子之间相互配合智能寻优算法,常使用于复杂系统中的参数寻优中,降低系统参数整定的困难[13-16]。粒子群算法的粒子运动速度由上一代粒子中的局部最优位置和全局最优位置决定,体现了粒子的自我认知和群体认知能力。
在一个d维搜索空间中,由n粒子组成的种群X=(X1,X2,…,Xn),其中Xi=(Xi1,Xi2,…,Xid),表示当前d维空间中第i个粒子,则下一代粒子的更新公式为:

取如下性能指标作为适应度函数,用来评价粒子的好坏,即:

式(7)中:t为系统响应时间;e(t)为系统误差。
3.2 粒子群算法的改进
改进粒子群算法是通过粒子适应值对粒子速度权重进行改进。采取粒子适应值大时粒子速度权值大,粒子适应值小时粒子速度权值小的策略,借助Sigmoid函数对粒子速度权值进行调整,其公式表示如下:

式(8)中:b为上一代粒子群中最大适应值;a为上一代粒子群中最小适应值。
但粒子后期速度变慢,粒子仍然有陷入局部最优或者粒子停滞不前的情况,此时,对粒子做出如下改进。
求取粒子适应度方差,其公式如下:

当2iρ越小时粒子越聚集,当2iρ多次小于一定值时(0.05nmax≤ε≤0.1nmax,其中ε为ρσ<2i的次数,nmax为最大迭代次数。对粒子施加柯西变异,其公式表示如下:

针对常规粒子群的不足,改进粒子群算法从多个策略出发,当粒子多次聚集时,采取柯西变异以提高粒子丰富度,减少粒子陷入局部最优的可能。
4 仿真实验
实验采用Matlab中Simulink环境建立系统模型,初始化粒子维度为6,每个维度范围取[-1 000,0]、[-3 000,-500]、[-150 000,-80 000]、[0,500]、[0,50]、[0,20],惯性因子取0.6,c1、c2取[0,1]之间的随机数,粒子规模取50,迭代次数取100,实验结果如下。
改进粒子群算法对ESO增益参数优化曲线如图3所示。
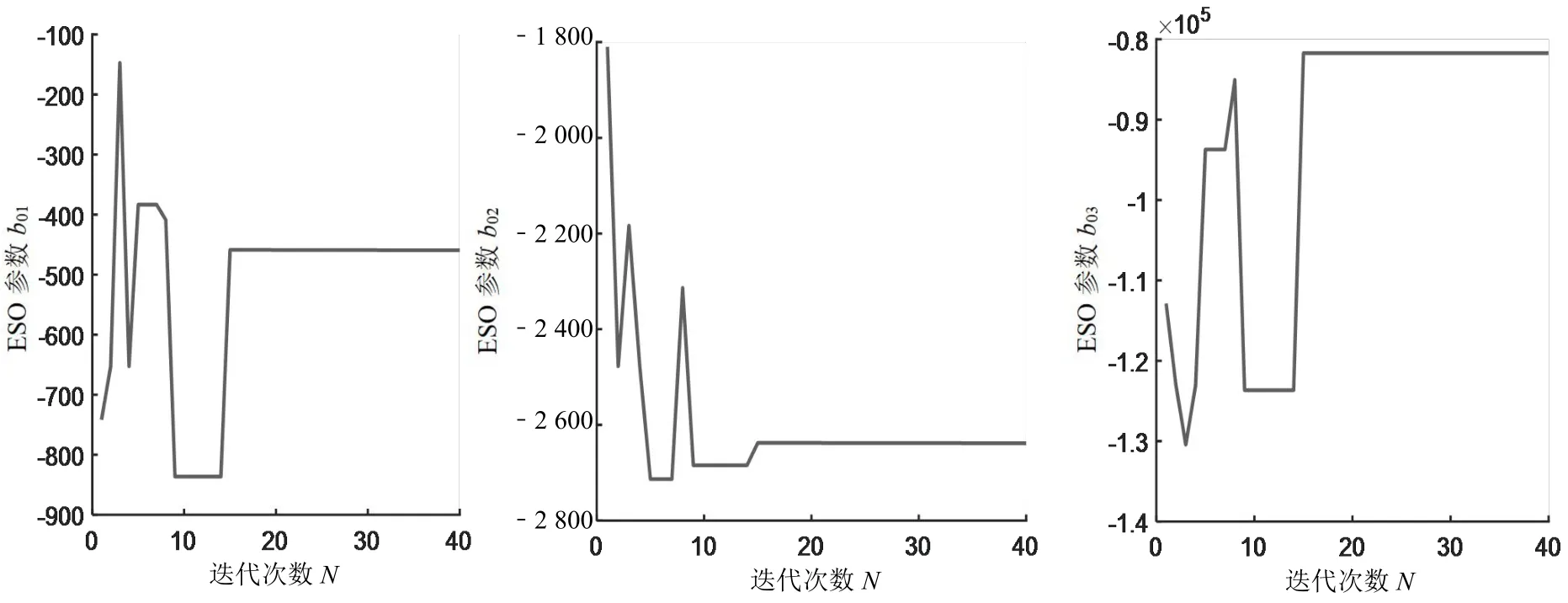
图3 ESO增益参数优化轨迹
改进粒子群对NLFSE增益参数和增益b0优化曲线如图4所示。

图4 NLFSE增益参数优化轨迹和增益b0优化轨迹
为了验证ADRC的抗扰性能,对磁悬浮系统进行了以下3个实验:①模拟在小球位置跟踪幅值为1 cm的阶跃信号,达到平衡位置后,对小球施加持续时间0.5 s,幅值为阶跃信号的40%脉冲扰动。②改变小球的质量,输入幅值为0.05 cm、周期为6 s的方波信号。③跟踪幅值为0.5 cm、周期为6 s的正弦信号。
以上实验仿真结果如图5所示。
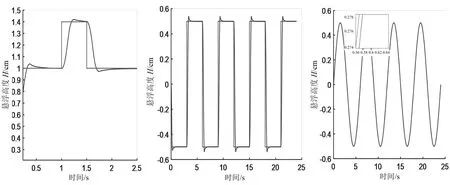
图5 磁悬浮系统抗扰性能测试仿真图
ADRC具有实时估计扰动并输入补偿功能,磁悬浮系统受到脉冲扰动时,超调和响应时间基本不受影响,其控制量也比较平缓,而PID不具有补偿扰动能力,因此会出现超调,以及控制量出现大的波动。其次,ADRC响应时间比PID快,因此在正弦信号和方波信号跟踪时,ADRC控制输出基本无滞后跟踪输入信号,而PID控制会有一定相位滞后特点。
磁悬浮系统中小球受到外界干扰,其光学传感器接受的信号会有噪声污染,而ADRC中TD具有滤波性能,设置TD中滤波因子仿真结果如图6所示。

图6 系统滤波测试仿真图
结果表明,TD滤波起到很好作用,但随着滤波因子的增加,系统响应时间也在延长,实际控制需合理调节TD滤波因子。
5 总结
ADRC应用到磁悬浮系统中起到了很好的控制效果,主要体现了ADRC的优越滤波性能和抗扰动性能,对磁悬浮系统易受干扰来讲,ADRC起到了很好的控制作用。但参数众多整定较麻烦,可以与粒子群算法结合整定参数,提高参数调节效率,使ADRC应用更加广泛。
