复杂轨面接触条件下轮轨动态相互作用研究
2023-01-04吴涛
吴涛
(成都地铁运营有限公司,成都 610031)
重载列车牵引质量和运行速度的不断提高对电力机车的轮轨黏着性能提出了更高的要求。重载列车大多运行于露天的轨道线路上,这使得轮轨接触界面暴露于外界环境之中,易被雨水、冰雪、油污和落叶等“第三介质”污染。试验研究表明,轮轨接触界面一旦被这些“第三介质”污染,摩擦系数会显著降低[1]。当施加牵引或制动力矩的电力机车轮对驶过附着污染物的低黏着区域时,若无任何防护措施,轮对则会出现空转现象,此时极易造成车轮和钢轨表面的擦伤,严重缩短车轮钢轨的使用寿命。
轮轨黏着特性是一个高度非线性和复杂的问题,国内外大量学者从静态和动力学这2种角度分析了复杂接触条件下轮轨黏着特性。CHEN和WU[2-5]等进行了大量试验和数值仿真计算,结果表明:轮轨表面接触状态对轮轨黏着特性影响显著,当接触表面存在水、油污或落叶时,黏着系数会显著降低,而沙砾可提高轮轨黏着水平。此外运行速度、轴重、环境温度以及表面粗糙度等因素亦对轮轨黏着特性影响显著。ZHAO等[6]利用有限元模型分析了轮对在经过低黏着区域时的滚动接触特性。SPIRYAGIN等[7-8]建立了考虑轮轨防空转控制的动力学联合仿真模型,对复杂接触条件下轮轨蠕滑特性进行了仿真计算。TAO等[9]对复杂接触条件下轮轨磨耗的发展进行了研究,对比分析了防空转控制阈值对轮轨磨耗的影响。YANG等[10]研究了复杂接触条件下车轮非圆化磨耗对轮轨切向动态相互作用的影响。
文中建立了考虑轮轨防空转控制的重载列车—轨道耦合动力学模型,其中采用PID防空转控制算法和最优转矩防空转控制算法来模拟轮轨防空转控制器。分析了复杂接触条件下轮轨动态相互作用特性,对比分析了控制策略对牵引效率的影响。
1 动力学仿真模型
轮轨力可利用测力轮对来测试。但目前轮轨力测试技术难以捕获轮轨系统空间接触几何关系以及高频的动态相互作用力,其中轮轨切向力更是难以测试。然而,得益于计算机计算效率的提高和动力学仿真理论的日益完善,利用合理精确的仿真模型可较为精准地得到不同条件下轮轨系统动态相互作用特性。
为了研究复杂轨面接触条件下轮轨系统的动力学响应特性,文中基于车辆—轨道耦合动力学理论[11],利用MATLAB编译了重载列车—轨道垂纵耦合动力学模型,其中包含重载列车系统模型、有砟轨道系统模型、轮轨滚动接触模型和防空转控制模型。动力学模型如图1所示。

图1 重载列车—轨道耦合动力学模型(侧视图)
1.1 重载列车和轨道系统动力学
重载列车系统模型主要由2节电力机车和50节货车组成。由于文中重点关注机车的轮轨系统动力学响应,因此对机车进行较为详细地模拟,采用仅考虑纵向单自由度的质点模型来模拟货车。机车系统模型主要包含1个车体、2个构架、4个轮对和4个牵引电机,模型中考虑各个部件的纵向、垂向和点头运动。此外机车车辆系统还包含一系列的悬挂元件。采用集中质量刚性体来模拟这些部件,对于悬挂元件则采用弹簧—阻尼单元来模拟。对于安装于车辆间的钩缓系统,文中则利用具有迟滞特性的弹簧—阻尼单元模拟[12]。
重载列车一般在有砟轨道上行驶。文中模型中采用分层模型来模拟有砟轨道。有砟轨道主要包含2根钢轨、一系列的扣件及轨枕和道床层。其中钢轨模拟为连续弹性离散点支撑的梁模型,考虑其纵向伸缩和垂向弯曲振动,采用模态叠加法求解其振动响应;扣件系统利用离散的弹簧—阻尼单元来模拟;轨枕和道床则采用刚性质量体模拟,考虑其垂向运动。
重载列车和轨道系统动力学模型可表示为式(1):

式中:MTV、CTV和KTV分别为系统的集成质量、阻尼和刚 度矩 阵;ẍTV、ẋTV和xTV分 别为 系统 集成 的 加 速度、速度和位移向量;Fsb表示系统外力,亦即路基—道床作用力。
1.2 轮轨滚动接触模型
轮轨滚动接触模型主要包括轮轨空间接触几何关系、轮轨法向力和轮轨蠕滑力/力矩的求解,文中所建立二维动力学耦合模型不包含轮轨空间接触几何关系的求解。轮轨法向力采用赫兹接触理论求解[11],在此不再复述。
在求解得到轮轨蠕滑率的基础上,轮轨蠕滑力可采用Polach模型[13]进行求解,为式(2):

其中有:

式 中:P为 轮 轨 法 向 力;kA和kS为 缩 减 因 子;C为Kalker系数;a和b分别为轮轨接触斑长半轴和短半轴;s为轮轨纵向蠕滑率;μ为轮轨摩擦系数,考虑了轮轨间相对滑动的影响为式(4):

式中:μ0和μ∞分别为静摩擦系数和全滑动时摩擦系数;B为摩擦系数指数衰减系数。
文中重点关注干燥和低黏着轮轨接触条件下轮轨动态黏着特性,其中这2种轮轨接触条件的参数见表1。不同运行速度和纵向蠕滑率情况下干燥和低黏着条件下轮轨黏着特性如图2所示,其中轴重为25 t。可以看出,当轮轨蠕滑率较小时,轮轨黏着系数随着蠕滑率的增大而增大,而当轮轨黏着系数在达到极值点后,其随着蠕滑率的继续增大出现下降趋势。当轮轨蠕滑率相同时,干燥条件下轮轨黏着系数大于低黏着条件下的黏着系数。
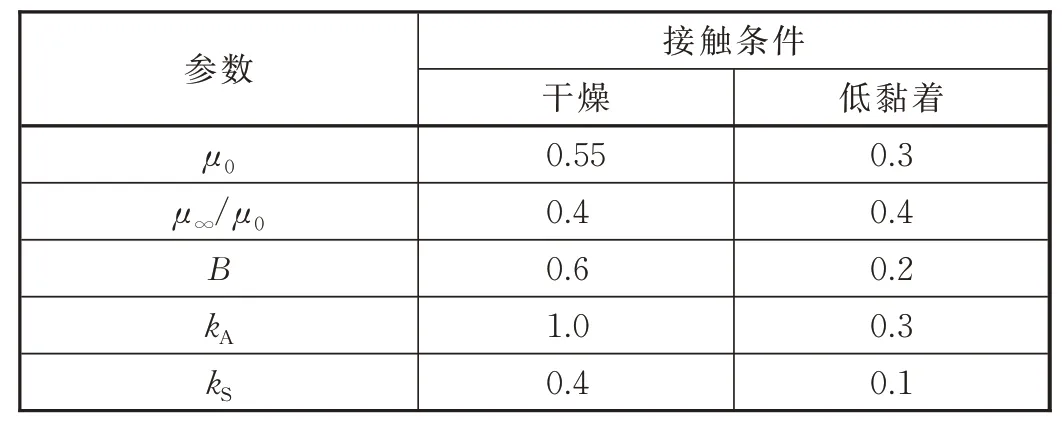
表1 干燥和低黏着状态下轮轨接触参数

图2 不同轮轨接触条件下轮轨黏着特性
1.3 轮轨防空转控制模型
轮轨防空转控制系统在避免轮轨接触界面出现擦伤行为中表现得至关重要。一般而言,电力机车均配置了独立的防空转系统以防止车轮空转现象的发生。采用先进的防空转控制策略还可以更好地提高轮轨黏着利用率,缩短牵引/制动距离。文中采用PID防空转控制算法和最优转矩防空转控制算法来模拟轮轨防空转控制器。
1.3.1 PID防空转控制
当采用PID防空转控制策略时,在此假设:若轮轨纵向蠕滑率未超过控制阈值,此时轮轨防空转控制器不会被触发;反之,如若轮轨纵向蠕滑率超过了控制阈值,轮轨防空转控制器则会被触发,此时牵引/制动力矩将会通过PID控制算法改变,以防止轮对空转的发生。
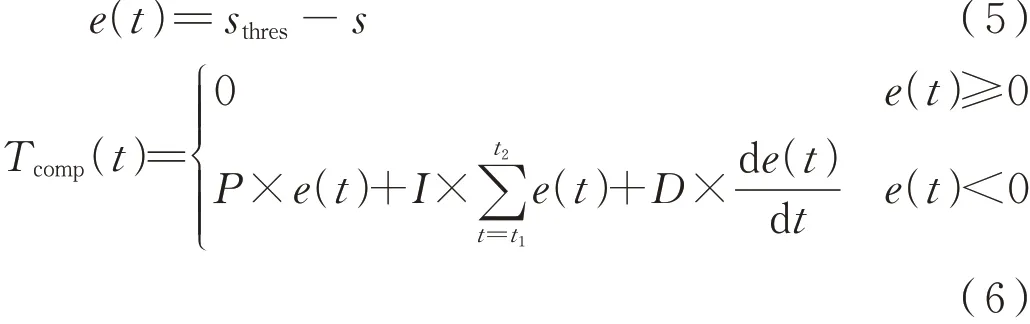
如若控制器被触发,则将提供补偿力矩来缩减牵引/制动载荷,这种补偿力矩亦可称为缩减力矩。缩减力矩计算公式为式(5)、式(6):式中:sthres为设定的防空转控制阈值;P、I和D分别为控制系数;t1和t2分别为控制器触发的起始和终止时间。
考虑PID防空转控制的轮对点头(旋转)运动方程为:

式中:Iwy为轮对点头运动惯量;Tw为电机作用于轮对上的电磁力矩;rw为轮对滚动圆半径;FLx和FRx分别为左侧和右侧纵向力。
1.3.2 最优转矩防空转控制
为实现轮轨黏着的最优利用,在此采用最优转矩防空转控制策略模拟轮轨防空转控制。与上述PID防空转控制策略类似,仅当轮轨纵向蠕滑率超过了控制阈值时轮轨防空转控制器才会被触发。但不同的是,该控制策略不提供额外的缩减力矩,而是通过实时计算最优纵向蠕滑率对应的蠕滑力,从而直接改变电磁输出力矩。不同运行速度和轨面接触条件下轮轨最优蠕滑力如图3所示。可以看出,对于相同的轨面接触状态和轮轨蠕滑率,不同运行速度下轮轨最优蠕滑率不同。低黏着接触条件下,轮轨最优蠕滑率大于干燥接触条件下的轮轨最优蠕滑率。
最优电磁输出力矩可表示为式(8):

式中:Fopt(t)为轮轨最优蠕滑力(如图3所示)。

图3 不同条件下轮轨最优蠕滑率
考虑最优转矩防空转控制的轮对点头(旋转)动力学方程为式(9):

2 计算结果分析
利用所建立的考虑轮轨防空转控制的重载列车—轨道耦合动力学模型,文中分析了考虑牵引工况时复杂接触条件下轮轨动态相互作用特性。仿真计算中牵引载荷与运行速度关系如图4所示。不平顺采用美国五级谱模拟,列车的启动速度为40 km/h。运行线路中,500~800 m对应于低黏着区域。

图4 牵引力矩
最优转矩防空转控制时,第一节机车4个轮对轮轨纵向蠕滑率和纵向蠕滑力响应如图5、图6所示,轮轨垂向力响应如图7所示。可以看出,当施加牵引载荷时,存在轴重转移现象,如图7所示,其中一位和二位轮对减载,三位和四位轮对增载。随着列车运行速度增大,牵引载荷随之减小,从而使得减载量逐渐减小。通过图5、图6可以看出,随着牵引载荷的减小,轮轨纵向蠕滑率和蠕滑力随之减小。当轮对经过低黏着区域时,轮轨纵向蠕滑率突然增大,纵向蠕滑力减小。低黏着接触条件导致较低的轮轨纵向蠕滑力不能平衡牵引力矩,使得轮对趋于空转,此时防空转控制器被触发,阻止轮轨蠕滑率进一步增大,轮轨纵向蠕滑率和蠕滑力维持在一定数值附近。其中一位、二位和三位轮对的防空转控制器被触发,而四位轮对由于增载,其防空转控制器未被触发。一位轮对减载量最大,其轮轨纵向蠕滑力最小。

图5 轮轨纵向蠕滑率

图6 轮轨纵向蠕滑力

图7 轮轨垂向力
根据上述分析可知,牵引工况下一位轮对减载量最大,因此轮轨黏着利用最差,鉴于此,下文主要通过一位轮对的轮轨动力学响应来对比分析采用不同防空转控制策略时轮轨黏着特性以及控制效果,其中对于定阈值的PID防空转控制器,控制阈值设为0.02、0.04、0.10和0.12。
不同防空转控制阈值和控制策略情况下,一位轮对轮轨纵向蠕滑率和纵向蠕滑力响应如图8、图9所示。可以看出,当轮对经过低黏着区域时,采用定阈值的PID防空转控制策略情况下,轮轨纵向蠕滑率维持在控制阈值附近,而采用最优转矩防空转控制时,轮轨纵向蠕滑率约为0.072~0.078。通过图9可以看出,当采用最优转矩防空转控制时,轮轨纵向蠕滑力大于采用定阈值防空转控制时的轮轨纵向蠕滑力,这是由于最优转矩防空转控制器可实时调整牵引力矩,使得力矩保持对应于最优蠕滑力。由此可知,当采用最优转矩防空转控制策略时,可保证最优的牵引效率。此外还可推断,采用较大的控制阈值时轮轨磨耗和踏面损伤也会随之增大。

图8 不同防空转控制策略下轮轨纵向蠕滑率

图9 不同防空转控制策略下轮轨纵向蠕滑力
不同防空转控制阈值和控制策略情况下一位轮对旋转速度和纵向速度响应如图10所示。可以看出随着牵引载荷的施加,轮对旋转速度和纵向速度逐渐增大。当轮对经过低黏着区域时,轮对旋转速度突然增大,其中控制阈值越大则旋转速度增大量越大,此时防空转控制器将阻止轮对旋转的进一步增大。通过对比不同防空转控制策略下轮对纵向速度可知,当采用最优转矩防空转控制策略时轮对纵向速度最大。换言之,相比于定阈值的防空转控制器,最优转矩防空转控制可有效提高牵引效率。可以预见,当低黏着区域更长时,采用最优转矩防空转控制可更显著缩短牵引距离,提高牵引效率。

图10 不同防空转控制策略下轮对运行速度
3 结论
文中基于车辆—轨道耦合动力学理论,建立了重载列车—轨道耦合动力学模型。分析了复杂接触条件下轮轨系统动力学响应;对比分析了采用不同防空转控制策略时的轮轨黏着特性以及控制效果。主要得出以下结论:
(1)轮轨表面接触状态对牵引工况下轮轨系统动态相互作用影响显著,当轮对经过低黏着区域时,轮轨纵向蠕滑率增大,纵向蠕滑力减小,此时防空转控制器被触发,以阻止轮轨纵向蠕滑率增大及车轮空转。
(2)相比于采用定阈值PID防空转控制器,当采用最优转矩防空转控制策略时轮轨纵向蠕滑力最大,牵引效率最高。
