基于红外感知的变电站鸟类定向驱散装置
2022-12-29李文震罗汉武陈师宽宋屹峰景凤仁饶成龙
□ 李文震 □ 罗汉武 □ 陈师宽 □ 宋屹峰 □ 孙 鹏 □ 景凤仁 □ 饶成龙
1.国网内蒙古东部电力有限公司 呼和浩特 010010 2.中国科学院沈阳自动化研究所机器人学国家重点实验室 沈阳 110016 3.中国科学院机器人与智能制造创新研究院 沈阳 110169
1 设计背景
变电站是电力系统中对电能的电压和电流进行变换、集中和分配的场所,其正常运行直接保证电能的质量,以及设备的安全。而变电站周围鸟类活动频繁,鸟类会使用爪、鸟喙对绝缘外皮进行破坏,同时大型鸟类降落在电容器组时,极易引发电容器组短路、绝缘失效等电路故障。据统计,鸟害原因致使变电站交流滤波器发生跳闸等电路故障,占我国电网电路故障三分之一以上[1-3]。
目前,为降低鸟类活动对变电站平稳工作的影响,人们加快了对驱鸟装置的研发进程,以提高对鸟类驱散效果。当前的驱鸟方式可分为物理驱鸟、生物化学驱鸟和多模式综合驱鸟等。常见的物理驱鸟包括驱鸟刺、驱鸟车、彩色风车、声波发射器、语音广播等[4-7],驱鸟刺的应用可有效减少电路跳闸的发生[8-9],短期内驱鸟效果明显。但长时间后,存在鸟类在驱鸟刺上筑巢的现象,使得驱鸟失败。以声光电为代表的物理驱鸟,主要通过驱鸟装置发射出的可见光、超声波、高压脉冲和电弧声[10-12],来刺激鸟类的感知器官,使鸟类感到不适或者恐慌来达到驱散的目的,这种驱散方式盲目性大,而且鸟类很容易对其产生适应性。在生物化学驱鸟方面,常见的驱鸟剂以颗粒型、粉剂型、水剂型为主。以典型的生物长效缓释型驱鸟剂为例[13],该释放型驱鸟剂的使用可降低50%因鸟害引发的用电事故率。日本大都工业制造厂研发了利用紊乱磁场驱鸟的驱鸟器[14],该装置利用旋转磁铁产生的絮乱磁场去干扰鸟类的生物磁场,使鸟类不敢靠近。尽管生物驱鸟可以达到一定的驱鸟效果,但这种驱散方式对鸟类造成一定程度的伤害。近年来,国内外多家机构开展了多模式综合驱鸟研究和智能驱鸟策略[15-17]。
田杰等[18]设计开发了综合性驱鸟系统,首先将监控的区域划分为若干个小区域,通过结合可见光图像检测仪、声音探测仪、雷达等多源传感器,获取鸟群的位置信息,再根据位置信息判断鸟群所在的小区域。并触发该区域内的驱鸟装置,有目的性的对鸟类驱散。张葛[19]、刘宇[20]等将变电站划分成多个小区域。在不同的小区域内根据鸟类活动的规律,采用分布式的设计思路,灵活布设不同的探测装置,经决策驱鸟装置的触发,驱散后利用雷达扫描,根据在雷达径向距离的改变值,判别是否驱散成功 。多模式综合驱鸟方式和智能驱鸟策略局部解决了驱鸟方式单一和鸟类适应性的问题,而从驱鸟效率来看,依然存在驱鸟指向性不足的问题。
针对上述驱鸟装置的现状,笔者设计了一种基于红外感知的变电站鸟类定向驱动装置。这一驱鸟装置采用红外图像进行鸟类目标检测与识别,实现对远距离鸟类、遮掩鸟类的精准识别,并对识别到的鸟群个体进行跟踪标记,而后将识别的鸟类位置反馈给主控器,控制二维转台转动瞄准鸟群所在位置,利用高爆声波驱鸟炮定向完成鸟类驱散,解决传统驱鸟装置对鸟类驱散指向性不足,以及鸟类对驱散装置产生适应性的问题。
基于对鸟类的识别、跟踪驱散,有效解决了驱鸟装置因指向性不足导致鸟类快速适应的问题,同时,用红外图像进行目标检测,可实现变电站大视场检测,解决了鸟类微小目标难以检测的问题。
2 装置设计
2.1 系统组成
笔者设计的驱鸟装置如图1所示,该驱鸟装置由机械子系统、控制子系统和感知子系统构成。机械子系统由驱鸟炮底座、底座安装板和驱鸟炮炮筒组成,控制子系统由主控箱、二维电动转台、炮筒姿态调整器和驱鸟炮控制点火器组成,感知子系统包括双光红外相机和相机底座。驱鸟炮筒通过炮筒姿态调整器与二维电动转台连接,二维电动转台与驱鸟炮底座连接为一体,其中炮筒利用炮筒姿态调整器实现上下的转动,利用二维电动转台实现在二维平面的左右转动。通过相机底座安装在驱鸟炮筒上的双光红外相机,其光轴轴线与炮筒的中心轴线平行。
2.2 运行原理
在驱鸟装置处于工作状态时,双光红外相机对前方视场进行实时的检测,在发现视场中有鸟类活动踪迹时,实时将鸟类与相机两者的相对坐标信息传输给主控器,主控器将传回数据,计算出鸟类坐标与炮筒中心轴线之间的偏差量,如果偏差值在允许误差范围内,则点火控制器被触发,炮筒发射出高爆声波,对鸟类进行驱散。如果偏差值超出允许误差范围,主控器根据偏差值进行计算,根据计算结果,控制二维电动转台和炮筒姿态调整器的转动,快速调整俯仰与偏航角度,将偏差值调整在允许误差范围内,然后触发驱鸟炮控制点火器,炮筒发射出高爆声波,对鸟进行驱散。
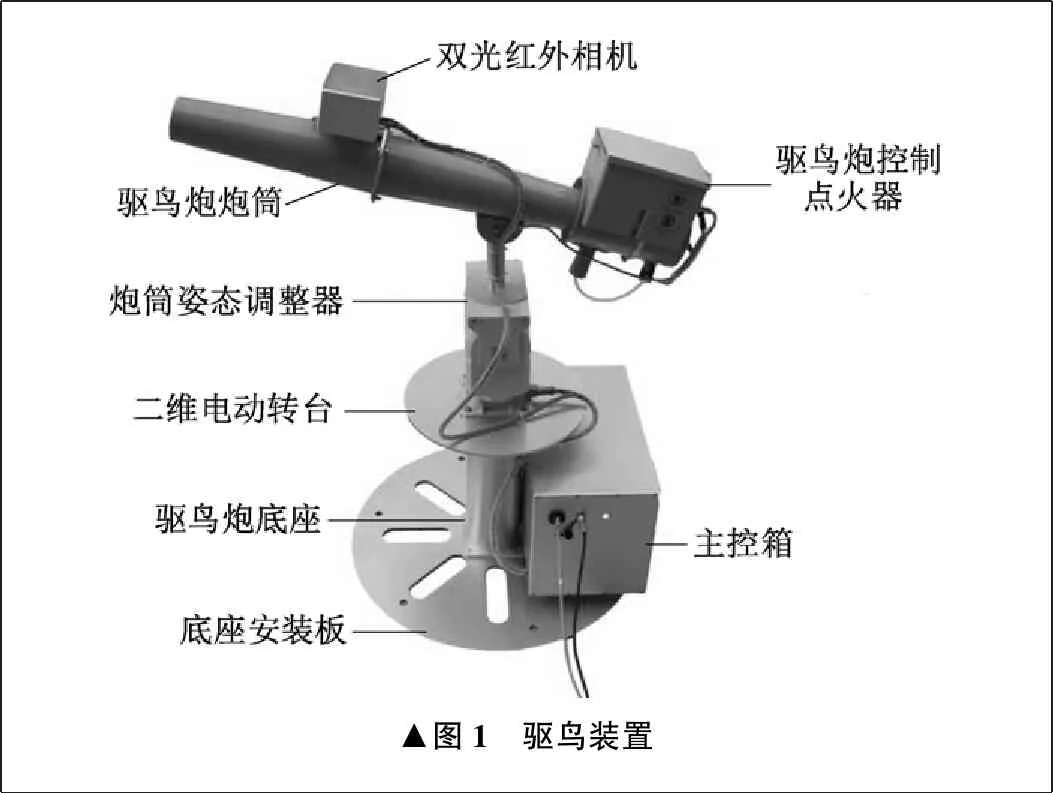
▲图1 驱鸟装置
3 基于红外感知的鸟类识别方法
目前,驱鸟装置主要借助多普勒雷达探测器、可见光相机、语音侦听等设备对变电站内的鸟类进行识别。其中语音侦听方式的侦听范围有限,且容易受其它杂声的影响产生误判,而可见光相机的应用面临着变电站早晚光照差异大,监测视场内可利用的特征点少等问题,导致可见光相机对变电站环境的适应性差。多普勒雷达探测器容易受变电站中产生杂波的影响,产生漏判或误判。基于以上分析,结合变电站环境中可利用特征信息少,红外弱小运动目标在地空背景下无法被精确检测的实际情况。笔者首先将所要识别目标分为显著目标识别和微小目标识别两大类,并分别制定更具有针对性的识别算法。针对显著目标的识别图像制定检测策略,结合静止背景下的运动目标检测方法,利用帧间图像配准后得到的小序列进行运动目标检测,针对微小运动目标检测,采用背景抑制方法,融合多尺度局部亮度差和加权图像局部熵,提高整体检测的稳定性和准确率。
3.1 图像预处理
为降低条纹噪声的影响,首先采用双边滤波对红外图像进行去噪。
然后利用尺度不变特征变换进行了图像的配准,克服了Harris角点的不具备尺度不变性的问题,而且对光照、噪声、视角变化都具备很强的稳定性,独特性好,在特征匹配时具有高的正确率。
3.2 显著目标检测
笔者采用了基于连续离异点低秩表达的运动目标检测方法。首先对于配准好图像序列,将图像分解为由基本不变的背景、运动目标组成的前景、噪声三部分组成。笔者所采用的目标是在背景图像中估测运动的前景目标。
采用交替迭代算法来求解能量泛函模型,通过将能量泛函求解分成两个步骤,分别能量最小化背景图像和运动的前景目标。
连续离异点低秩表达的运动目标检测方法的应用,不仅提高了鸟类在变电站复杂环境下的识别效率,还实现了对被变电站内装置遮掩鸟类的精准识别。
3.3 微小目标检测
红外成像系统远距离成像时,鸟类等目标呈现小目标特性。又由于远距离的原因,目标运动不明显,在动平台成像时,周围背景的运动变化量远大于目标,且特征背景少。对此笔者提出了基于多尺度亮度差加权熵的方法。多尺度亮度差体现的是中心与周围邻域的差异性,容易受强边缘信息影响,通过结合局部熵对多尺度亮度差进行修正,可以提高整体检测的稳定性和准确率。
首先利用局部亮度差比较中心像素周围像素点的均值与其外围像素均值的差异。由于目标大小不确定,固定内窗和外窗大小无法满足实际应用,需要引入多尺度信息。根据小目标的定义,小目标占2像素×2像素到8像素×8像素之间,通过固定外窗,取不同大小的中心像素邻域作为内窗,分别计算内窗与内外窗之间的局部亮度差,以它们之间最大的亮度差作为该中心点的多尺度局部亮度差。
由于红外图像中,小目标的出现,破坏了目标区域的纹理特征,会导致目标区域的图像熵发生变化。通过限定局部窗口大小,以窗口内图像信息计算图像熵,便能体现局部特征。根据最大熵原理,均匀分布的区域熵要大于非均匀分布的区域,由此可以根据局部图像熵在复杂背景中寻找目标。
多尺度亮度差加权的局部熵,由局部熵结合多尺度亮度差组成。多尺度亮度差加权熵可以有效地增强目标、抑制背景。使得驱鸟装置的感知子系统中的双光红外相机可以透过变电站复杂环境,及时有效的对距离变电站较远的鸟群识别,实现对鸟类在未进入变电站之前进行驱散。
4 定向跟踪驱散控制
4.1 控制模型
在变电站对鸟类进行定向跟踪驱散,首先要对鸟类进行识别,然后对鸟类的位置进行精准确定,最后使用声波驱鸟炮对鸟类进行定向驱逐。为此,笔者设计了一套控制系统,系统控制框图如图2所示,实现对鸟类的跟踪和最大驱散强度的指向性驱散。
图2中,(u0,v0)为鸟类在图像中的期望位置,(ui,vi)为鸟类在图像中的当前位置,e(t)为鸟类当前位置与期望位置的偏差值,θ1、θ2分别为偏差值解耦的俯仰角度与偏航角度,u(t)为输出信号。
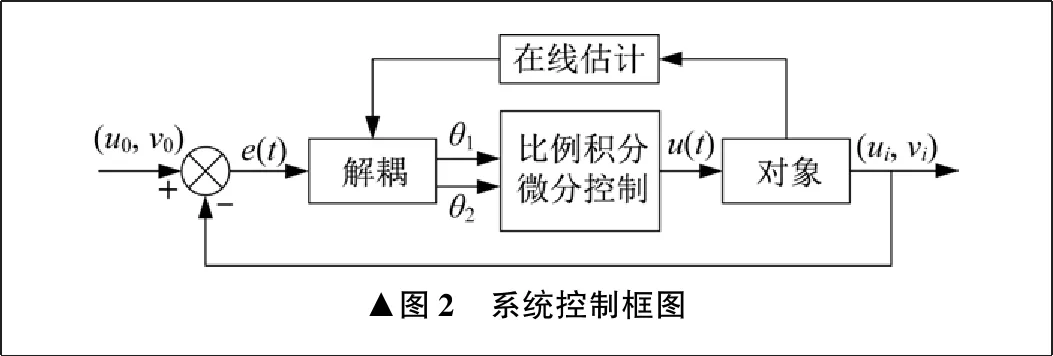
▲图2 系统控制框图

▲图3 成像原理
首先通过相机对鸟类进行图像捕捉,来确定鸟类当前位置。成像原理如图3所示,将相机获取的鸟类位置信息(ui,vi)传送到主控制器中,与期望位置(u0,v0)进行比较。
然后根据二维电动转台俯仰偏航运动完全解耦,将得到的偏差值解耦的θ1、θ2传送到比例积分微分控制器中,以调整声波驱鸟炮俯仰角度θ1与偏航角度θ2,捕捉鸟类实时位置,并更新鸟类目标在图像中的位置(ui,vi)。驱鸟过程如图4所示。根据常见鸟类大小与相机参数进行估计匹配,从而对鸟类的位置进行实时更新,最后利用声波驱鸟炮对鸟类进行定向驱逐。

▲图4 驱鸟过程
4.2 控制率
为了更加精准地跟踪鸟类,驱鸟装置采用了比例、积分、微分控制算法来实时跟踪。相机识别鸟类后,应用比例、积分、微分控制算法来调整声波驱鸟炮俯仰角度及偏航角度,以确定鸟类的位置。当系统发生偏差时,可立即产生调节作用,以减少偏差,消除系统稳态误差,提高准确度。应用比例积分微分控制算法,可精准调节声波驱鸟炮的角度,实现对鸟类定向跟踪和最大驱散强度的指向性驱散。输出信号u(t)为:
(1)
式中:Kp为比例因数;Ti为积分时间常数;Td为微分时间常数;t为时间。
声波驱鸟炮与鸟的相对位置可以定向跟踪,如图5所示,声波驱鸟炮与鸟类位置ui的关系可表示为:
ui=fXi/L-ftanθ1+ul/2
(2)
式中:L为鸟类与声波驱鸟炮的水平距离;f为相机焦距;Xi为鸟类位置相对于声波驱鸟炮的高度;ul为相机在成像面上的视野。
类似情况下,可以得到vi的表达式为:
vi=fXi/L-ftanθ2+ul/2
(3)

▲图5 定向跟踪
5 试验
为验证对微小目标鸟类的实时跟踪方法,试验分为实验室试验与现场试验。采用声光复合方式,结合红外相机与声波驱鸟炮装置,对显著目标及微小目标进行实时跟踪,以实现指向性驱散鸟类。
5.1 实验室试验
在实验室应用声波驱鸟炮对显著目标进行测试,如图6、图7所示,目标物体出现且目标大小低至12像素×12像素时,相机可以准确捕捉到目标并进行识别标记。同时,该装置在低对比度的情况下也可以对目标物体进行实时跟踪。
5.2 现场试验
在实验室试验的基础上,应用驱鸟装置在变电站对鸟类开展跟踪试验,如图8所示,这驱鸟装置可以对微小目标识别跟踪。可以发现,对4像素×4像素及以上的鸟类可以准确识别并实时跟踪,而对2像素×2像素的鸟类在追踪的过程中会有约20%连续运动帧丢失的情况,但考虑到目标鸟类离变电站的距离较远,不会对变电站的正常运行产生实际影响,所以这驱鸟装置可以满足当前的实际要求。同时,可以控制运动目标数量检测,对鸟类的多个目标进行检测,以实现实时跟踪。
针对以上试验,可以发现,该驱鸟装置能够对显著目标,以及微小目标的鸟类实时追踪。同时,对于多目标和复杂场景下的目标追踪,该驱鸟装置同样有效。
6 结束语
变电站周围经常出现鸟类活动,比较容易引起电容器组短路,造成严重电路事故。笔者针对鸟害设计了一种基于红外感知的变电站鸟类定向驱散装置,采用图像匹配,对鸟类精准定位与识别,并实现指向性驱散。相比于传统的持续输出声光电信号驱散鸟类,该驱鸟装置采用红外光对鸟类进行识别,运算速度快、识别准确率高,且应用高爆声波驱鸟炮,在不伤害鸟类的基础上可实现快速准确的指向性驱散功能。
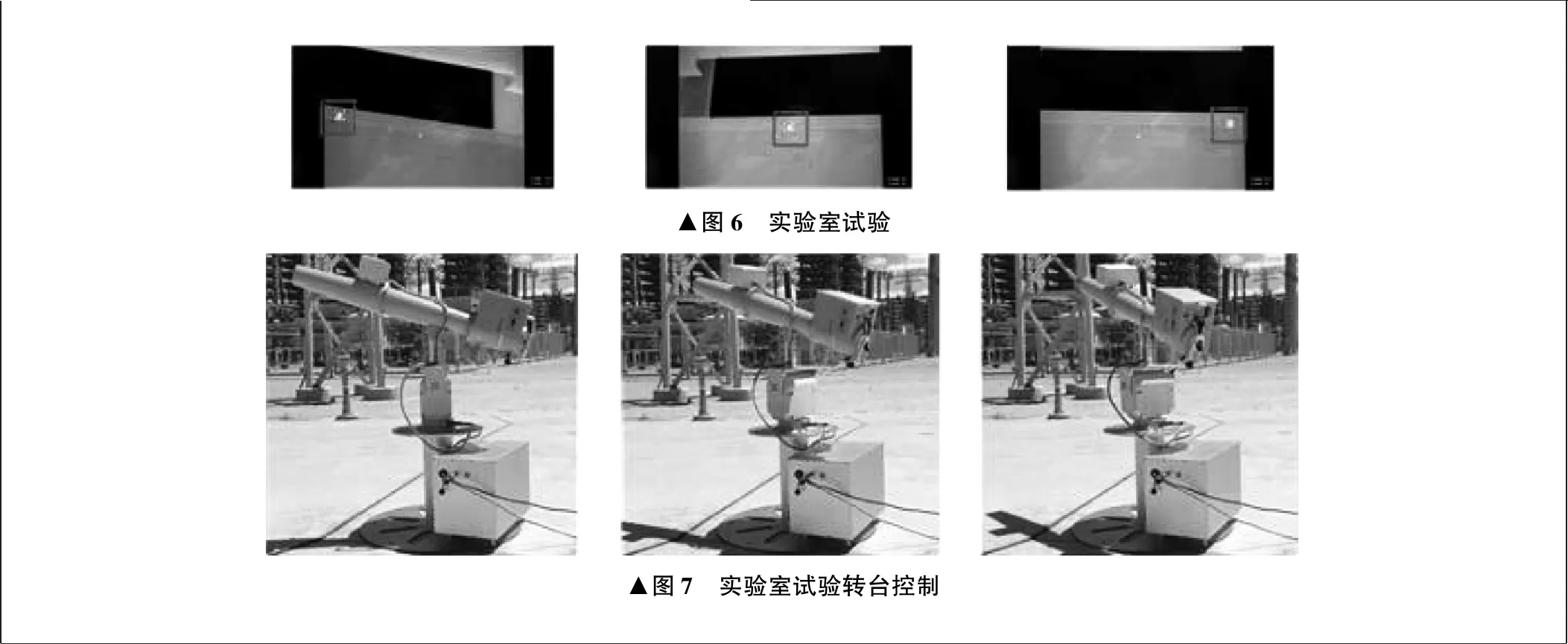
▲图6 实验室试验▲图7 实验室试验转台控制

▲图8 现场试验
