数字孪生下的继电保护装置故障远程VR在线诊断系统设计
2022-12-27李配配马振宇
许 明,平 夏,李配配,马振宇,陆 辉
(国网淮南供电公司,安徽 淮南 232007)
继电保护装置的被保护部件出现故障时,为保证其余部分顺利工作,该装置能够从完整的电力系统中切断故障部件[1]。继电保护装置故障将无法保证电力变压器的正常工作,会造成变压器内部短路,严重时会导致地板牙器油冲破抗爆管,从而引发重大火灾事故。
为第一时间获取继电保护装置故障诊断结果,吴迪等采用深度神经网络的方法对摄像机采集的现实图片进行分类[2],通过所采集图片与其他图片的对比分辨出继电保护装置的状态,并结合修改标准图像框架的配准方案,使该算法可实施于不同光照下,该算法在实际应用中的检测准确率较高,令继电保护装置的安全性大幅提高。陈桂芳等采用长短期记忆网络方法建立多故障诊断模型[3],使继电保护装置的故障诊断精度更高,包容性很强。但上述两种方法无法实现实时告警,不能准确诊断、解决继电保护装置的故障。
数字孪生是将实体映射到虚拟世界,通过实时传感以及沉浸交互实现虚实结合,多方面、多角度完成模拟[4]。为此设计数字孪生下的继电保护装置故障远程VR在线诊断系统,远程监控继电保护装置的日常工作,一旦装置出现异常,该系统就可以迅速接收到异常信息,提高继电保护装置故障的诊断精度和速度。
1 VR在线诊断系统
继电保护装置故障远程VR在线诊断系统分为感知层、网络层、平台层和应用层四个层面。感知层通过感知设备采集继电保护装置电流电压数据,并采用地面激光雷达、摄像机分别采集继电保护装置结构、尺寸等点云数据、继电保护图像[5]。网络层通过光纤网络将采集到的继电保护装置相关数据传输至平台层进行处理,为保证数据传输的稳定性和安全性,网络层由通信通道和相关网络设备共同构成。系统的平台层通过运检管控平台对继电保护装置相关信息进行管理、协调以及储存;数字孪生三维建模平台采用数字孪生技术并运用地面激光雷达以及摄像机获取点云数据和图像对继电保护装置进行数字孪生3D建模;统一视频平台作为系统的用户交互界面,可实现故障诊断以及VR远程全景监测结果的显示。应用层采用小波信号检测理论检测感知层采集的异常信号,并将所得异常信号传输到故障诊断模块完成异常信号检测。VR远程监测模块调用数字孪生三维建模平台所构建的继电保护装置数字孪生三维模型,实现继电保护装置进行全景监测和三维检修巡视。最终将VR远程监控画面与故障诊断模块的诊断结果传回平台层的统一视频平台,完成显示。基于数字孪生构建继电保护装置故障远程VR在线诊断系统,具体结构如图1所示。
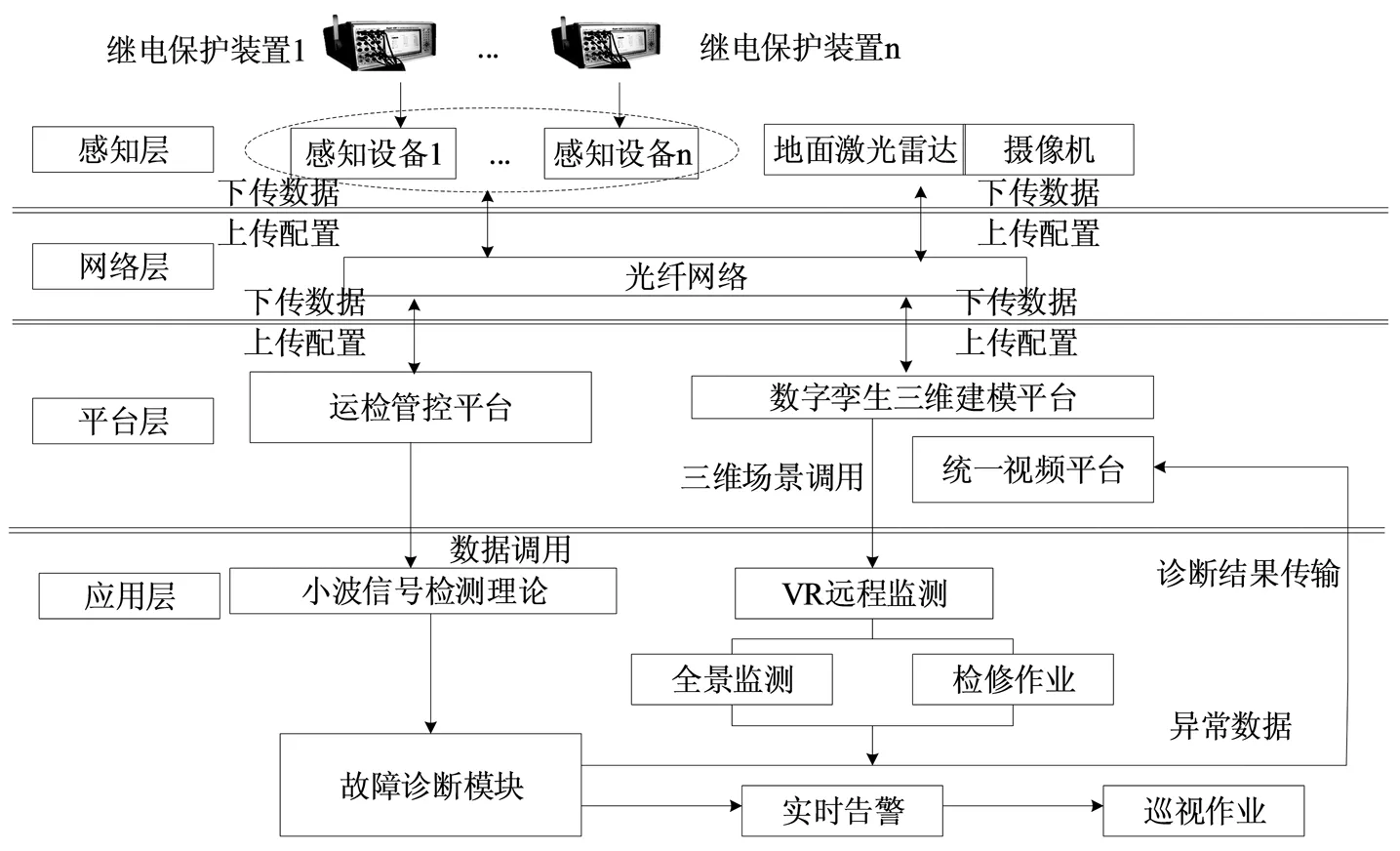
图1 VR在线诊断系统
1.1 继电保护装置感知设备
继电保护装置要保证电网公司的生产安全,所以处于运行过程中的变电站对感知设备的接入要求较高。
为此,系统感知层利用感知设备采集继电保护装置的电流、电压数据[6],感知设备不用改变继电保护装置当前状态,可确保感知设备在采集数据的过程中不会受到影响,更不会耽误继电保护装置附属输出设备的正常工作。各个变电站有不同数量的继电保护装置,产商生产的继电保护装置的串行数据输入口的波特率也不一样。继电保护装置感知设备结构如图2所示。
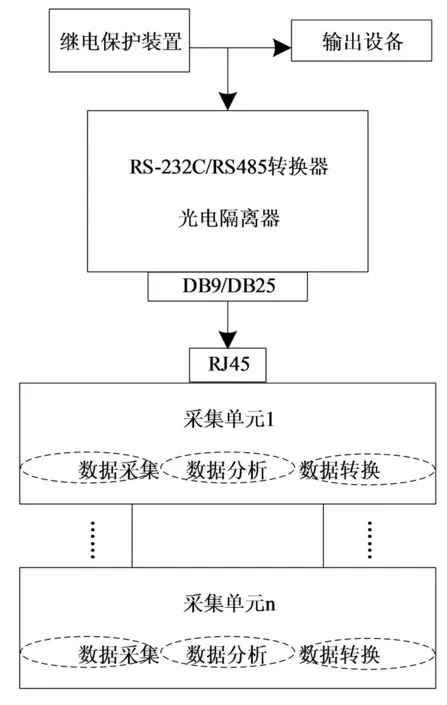
图2 感知设备结构
继电保护装置的串行接入口有两种型号,采集模型将其统一为RJ45接口传输到采集设备。通过RJ45接口将所采集的继电保护装置电流电压数据传输至交换机,再通过交换机输出到网络层[7]。该感知设备的功能包括数据采集、数据分析、数据转换。各个部分各自独立,又因一起完成继电保护装置数据采集任务而相互依存。多台继电保护装置可通过同一个感知设备采集和实时转换还原数据,有许多继电保护装置时,可以设置多个感知设备。
1.2 数字孪生继电保护装置三维建模
为直观、清晰地展示继电保护装置的运行过程,运用数字孪生技术以地面激光雷达采集点云数据为基础构建继电保护装置的数字孪生三维模型[8]。该模型可以作为VR远程在线检测的基础。
1.2.1 地面激光雷达点云数据采集
数字孪生三维建模需要高精度三维数据,该数据通过地面激光雷达技术结合非接触测量的方法得到。实际继电保护装置的数据被地面激光雷达技术通过数字孪生的方式转变成可处理的点云数据。地面激光雷达是一种全新的技术手段,通过其可获得继电保护装置的空间三维信息,促进空间信息数据化的发展。其工作原理如图3所示。通过扫描控制模块对激光发射器放射的激光信号进行处理,利用水平或垂直的反射镜将完成处理的激光信号射向继电保护装置,记录器接收该激光信号并返回到探测器,输出可以直接识别处理的建模数据至测距模块。

图3 地面激光雷达的工作原理
使用地面激光雷达技术扫描继电保护装置,获取装置的三维点云数据,通过三维点云数据与专业摄像机拍摄的继电保护图片结合得到彩色的点云数据[9]。彩色点云数据包括的信息有继电保护装置的结构、尺寸等。采用地面激光雷达的建模方法可有效提高继电保护装置三维建模的准确性,以及虚拟模型的真实性。
1.2.2 继电保护装置三维建模
Pointcloud软件通过切片方式采集点云数据中的各种特征量,并采用AutoCAD软件中的绘图工具构建三维模型,完成继电保护装置的数字孪生。Pointcloud软件的建模方法多样且真实性高,所以本文采用Pointcloud软件与AutoCAD结合对继电保护装置进行三维实景建模,其三维建模基本步骤如下:
(1)规则特征装置零件的拟合:通过Pointcloud软件采集形状规则的装置零件的点云数据,如长方体、圆柱等形状的装置零件,将此类装置零件的数据拟合成模型。
(2)创建其他部分的点云切片:Pointcloud软件以某个坐标轴方向为基础,通过剖析继电保护装置中不规则形状零件的点云数据创建点云切片。
(3)构建三维线框模型:通过拟合的点云切片得到二维轮廓图,再通过扫掠、旋转等功能在适宜的路径上建立构建继电保护装置的三维线框模型。
(4)拼接模型:参照继电保护装置的完整点云数据,将构建的继电保护装置的零件模型在AutoCAD中组建成完整的继电保护装置三维模型。
1.3 继电保护装置的故障诊断模型
应用层的故障诊断模块能够以小波信号检测获取的结果,完成继电保护装置的故障诊断,验证继电保护装置中出现异常信号的位置是否出现故障。继电保护装置的故障诊断模块由数据仿真、数据接收与发送、数据检查和结果判定等环节构成。继电保护装置故障诊断模块如图4所示。
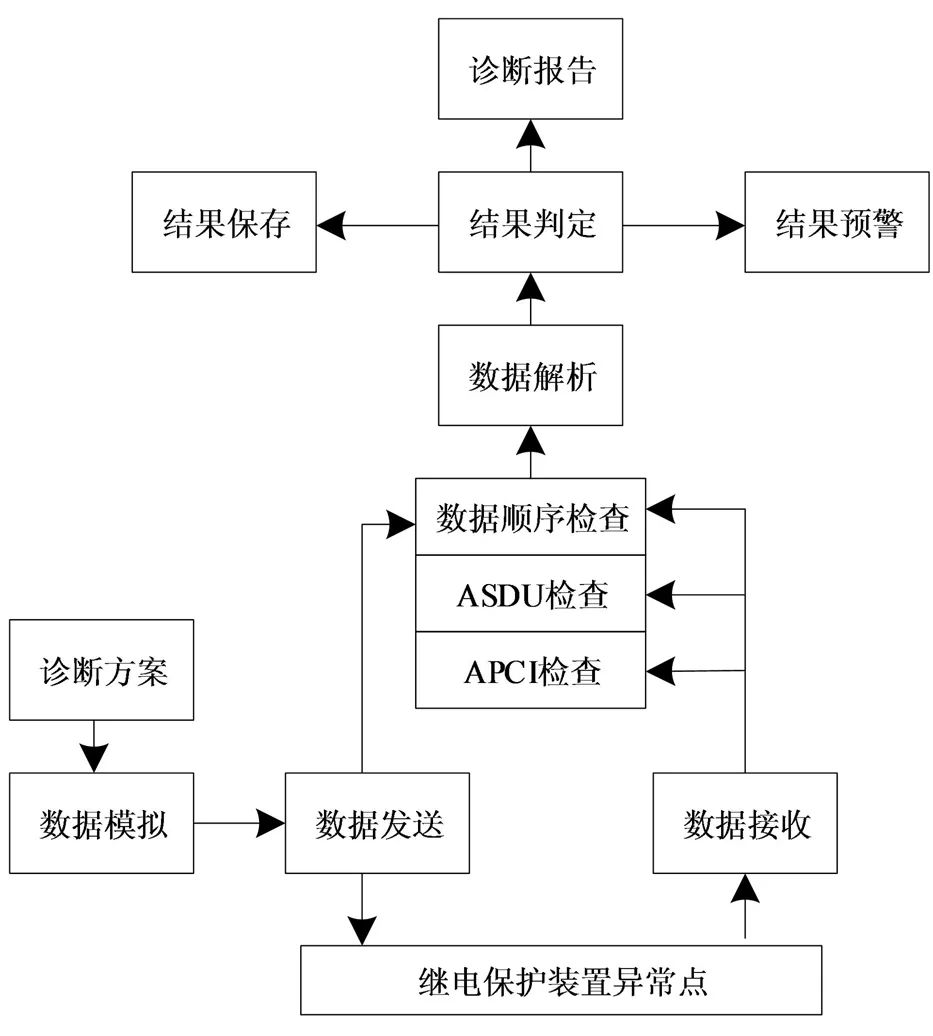
图4 继电保护装置的故障诊断模块
在图4中,继电保护装置的故障诊断原理如下:
(1)根据预先设置完成的诊断方案对故障诊断数据进行模拟,然后将模拟数据发送到继电保护装置异常点,该异常点接收模拟数据。
(2)对继电保护装置模拟数据依次执行APCI(指高级配置和电源管理接口)检查、ASDU(指应用服务数据单元)检查以及数据顺序检查。
(3)将检查后的数据进行解析并与预期数据相比较,输出比较后的判定结果,完成继电保护装置故障诊断,并实时告警,助力装置检修。
1.4 VR远程监测模块
将上述所构建的继电保护装置三维模型引入应用层的VR远程监测模块,使VR中展现的继电保护装置在视觉上更加真实,更好地监测继电保护装置是否出现异常。
由于开源三维图形的性能高,VR远程监控设备运用开源三维图形渲染引擎OpenSceneGraph开发[10]。该VR设备在平台层的运行环境是Windows操作系统,人机界面使用C++。其还配置了3D显示屏与图形的专业工作站,使显示效果更清晰。
VR设备的远程监控模块结构如图5所示。VR设备的远程监控主要通过远程执行端与本地端实现。远程执行端采用LAN(局域网)与本地端进行通信,其接收来自本地端的控制命令,然后向本地端发送真实断电保护装置的相机图像信息和位置信息。VR设备安装本地端,其通过PC接收继电保护装置的电压电流数据。同时,VR设备反馈数据(异常检测结果、警报信号)到平面层的PC。

图5 VR远程监测模块结构
1.5 基于小波奇异信号的继电保护装置故障信号检测
继电保护装置正常运行过程中,可以运用小波奇异信号诊断继电保护装置是否故障,出现小波奇异信号表示继电保护装置的信号发生突变。应用层运用小波奇异性原理检测平台层整合的继电保护装置感知数据[11],使系统快速且精准地接收异常信号,实现继电保护装置故障信号检测。
1.5.1 信号奇异性理论
奇异性函数是具有无限性的可导函数,当继电保护装置的信号在某点出现不持续或者中断的情况时,说明此信号在该点有奇异性(即奇异点),一般用Lip指数(Lipchitz指数)表示信号有奇异性。
如果继电保护装置的信号f(t)在t0位置出现导数不持续或中断的情况,那么f(t)在t0处有奇异性[12],将其描述为:
|f(t)-f(t0)|≤C|t-t0|β0<β≤1,t∈A(t0)
(1)

分析可知,当常数β=1时,该继电保护装置的信号是可导函数且具有连续性;当0<β<1时,信号不连续;若β越小,则f(t)在t0处的奇异性越大。
Lip指数β给出了f(t)在t0点奇异性的精确信息。
1.5.2 时间分辨率优化
小波信号为了更好分析继电保护装置的信号,把信号分解成处在不同频带以及不同时域的各种成分[13],式(2)描述了函数的小波变换:
(2)
式中,f(t)∈L2(R),R为实数集,Ψ表示能量有限信号,d为半径;决定频域信息的尺度因子为a;决定时域信息的频移因子为b。
已知小波变换中的时频窗可变幻,当1<β1<β2时,随着|β|变大,频宽缩短,时宽延长,因此频域的分辨率提高,时域的分辨率降低。上述说法表明小波信号处于高频时的时间分辨率高。
1.5.3 故障信号奇异点定位
小波变换的卷积形式,用式(3)描述:
(3)

2 实验结果
为验证本文系统的故障远程在线诊断效果,以某变电站内继电保护装置为对象展开测试。
利用本文系统对该变电站内的继电保护装置进行三维建模,研究其故障诊断和远程检测效果。继电保护装置的三维模型与出现故障的三维模型分别见图6、图7。

图6 继电保护装置三维模型
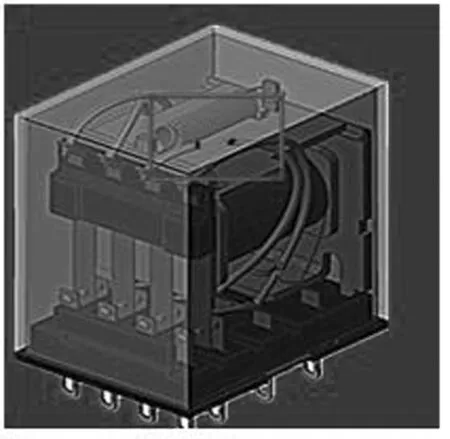
图7 继电保护装置故障的三维模型
根据图6、图7可见,通过本文系统所构建的三维模型细节清晰可见,图7中红色方框为继电保护装置线路断开位置。这说明采用本文系统建构的模型具有真实性,并能精准检测继电保护装置的异常,定位到异常点。
将本文系统应用于继电保护装置中,对比采用本文系统前后继电保护装置的各指标情况,如表1所示。
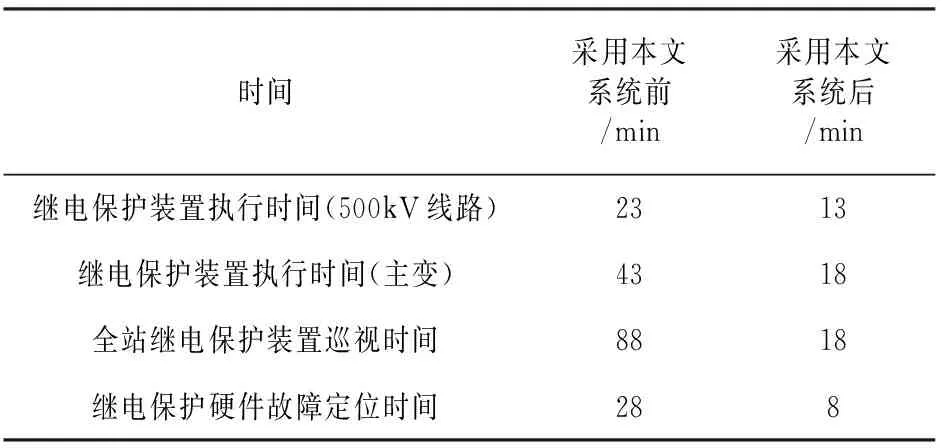
表1 系统采用前后各指标对比
通过表1分析可知,采用本文系统后的继电保护装置的执行时间、巡视时间、硬件故障的定位时间比采用本文系统前的时间多。使用本文系统后,500 kV线路的继电保护装置的执行时间缩短了15 min,主变压器的继电保护装置的执行时间缩短了25 min,全站继电保护装置的巡视时间缩短了70 min,继电保护装置硬件故障的定位时间缩短了20 min。这说明本文系统可较好地应用在继电保护装置的诊断过程中,有效缩短诊断时间、快速发现继电保护装置的故障。
测试本文系统VR远程监测模块在两个场景下监测继电保护装置电流、电压数据更新变化所需的时间,测试本文系统VR远程监测模块监测反应时间:第一个场景是通过100 MB本地虚拟网(VPN)传输电流电压数据;第二个场景是使用4G移动互联网作为传输电流电压数据的媒介。
两个场景都通过更改500次的数据实例测量系统VR远程监测模块监测反应时间,实验结果如图8所示。
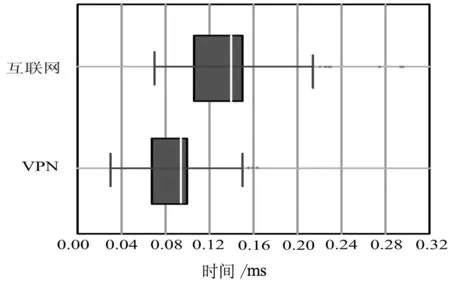
图8 VR远程监测模块响应时间
分析图8可知,图中的顶部框图是利用互联网传输数据时VR远程监测模块响应时间的四分位数,底部框图是使用本地虚拟专用网络传输数据时VR远程监测模块响应时间的四分位数,白色垂直线表示中位值。从中可知,运用移动互联网传输电流电压数据的速度比本地虚拟专用网络的速度慢。本地虚拟专用网络的最慢反应时长是0.167 s,最快反应时长是0.035 s。因为移动互联网不可控且不稳定,移动互联网的反应时间大约是本地虚拟专用网络的2倍。
本地虚拟专用网络和移动互联网响应时间的中位数分别是0.093 s和0.137 s。本地虚拟专用网络与移动互联网反应时间的上分位数分别是0.103 s和0.155 s,本地虚拟专用网络与移动互联网反应时间的上分位数分别是0.071 s和0.113 s。实验结果说明:一半的本地虚拟专用网络反应时间区间为0.071~0.102 s,一半的移动互联网络反应时间区间为0.113~0.155 s。这说明本文系统中的VR远程监测模块可以快速反应实际继电保护装置电流电压数据的变化,尽管采用不可控的4G移动互联网最慢的反应时间也在0.3 s,可以实时接收电流电压数据的更新变化,非常适用于诊断继电保护装置。通过监控画面实时更新,可有效提高工作人员发现继电保护装置故障的速度。
测试系统通过VR设备进行远程监控的帧率,结果如图9所示。
通过图9分析可知,本文系统的VR远程监测帧率波动区间为[56,64]fps,帧率波动幅度较小,变化较为稳定。通过上述实验,验证了本文系统运行的有效性和流畅性,说明通过本文系统展开的远程操作较为流畅,可有效监测继电保护装置的运行状态。
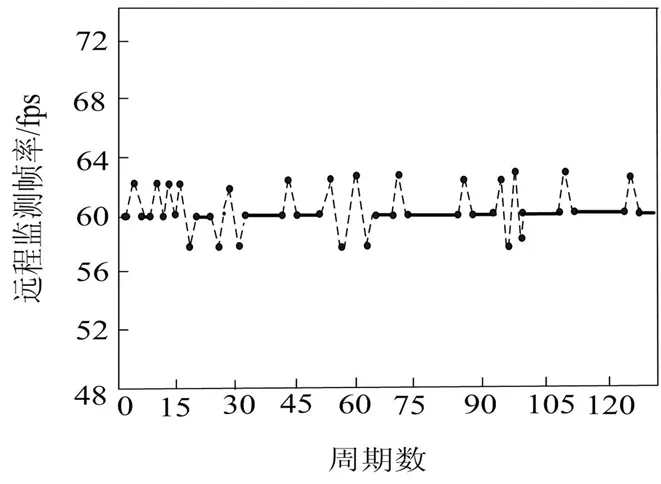
图9 本文系统VR远程监测帧率
3 结 论
当电力设备处于异常状态时,继电保护装置会自动切除故障,延迟电力系统的故障发生。工作人员如果没有检测到继电保护装置的故障会对电力系统的正常运行造成影响,设计数字孪生下的继电保护装置故障远程VR在线诊断系统,可以远程且迅速准确地诊断继电保护装置的异常情况,降低不必要的风险。
