基于“双摆模型”的机器人腿部运动模型机理分析
2022-12-19咸阳师范学院物理与电子工程学院徐逸坤华雪侠何东山齐凯强刘嘉妮
◇咸阳师范学院物理与电子工程学院 徐逸坤 华雪侠 何东山 齐凯强 刘嘉妮
双摆系统是一个非线性的动力学系统,有着多样性和复杂性,尤其是其混沌行为。双摆模型是一种常见的振动系统。碰撞振动作为非线性问题的一种典型情况,广泛存在于实际工程各个领域中。论文研究以机器人行走过程中双腿运动特征为基础,设计构建了基于参数激励下质量集中的“双摆模型”结构模型,文章通过对其进行建模、受力分析建立运动方程并研究其运动情况,对其复杂运动进行分析,得到在不同的初始条件下的数据及运动过程的模拟。利用 Tracker 软件捕捉到的数据,通过控制变量法进行定量分析不同条件下的运动情况。
1 双摆运动模型理论分析
机器人行走过程中双腿运动特征可以将其看作由两个质量分别集中在膝盖设其质量为的和集中在脚踝质量为两个质量块通过轻质杆连接的“双摆模型”结构系统(如图1),两均质杆长度分别为,在O点通过铰链与动点A连接,A沿上下(y轴)周期性往复运动,其运动方程为y=其中为运动幅值,为频率。这样的系统是一个非线性的动力学系统,有着多样性和复杂性,尤其是其混沌行为。
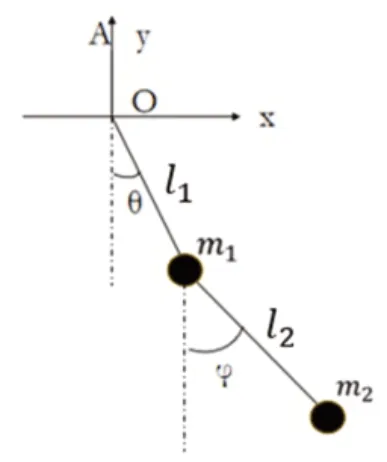
图1 机器人腿部模型
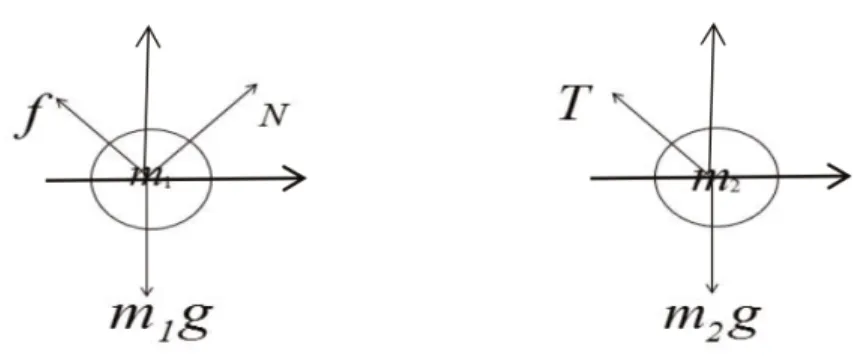
图2 和 受力分析
由图1可知:

2 机器人腿部“双摆运动”模型实验分析


图3 图像

图4 图像
图5 图像
图6 图像
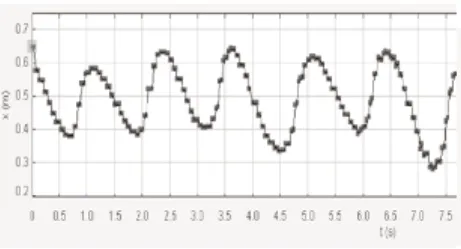
图7 图像

图8 图像

图9 图像

图10 图像
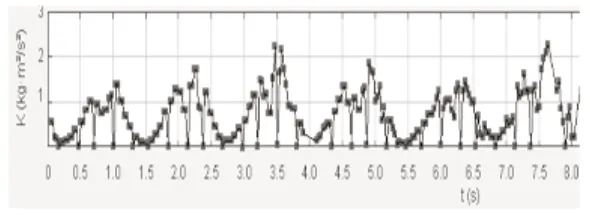
图11 图像
拉格朗日方程:

保守力系的拉格朗日方程为:

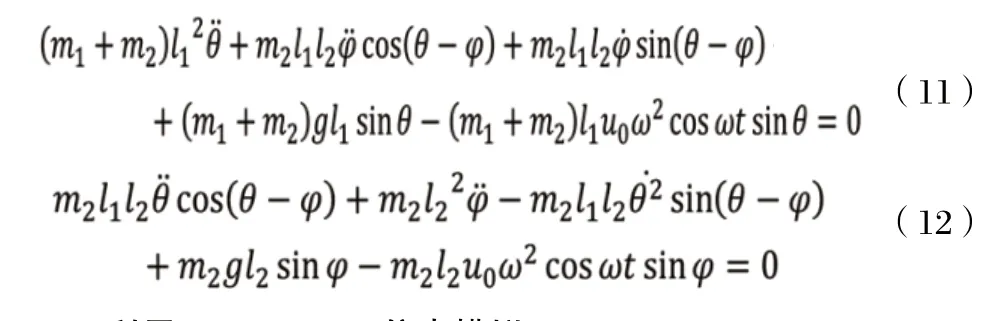
将公式(7)(8)代入(10),可得机器人腿部模型的参数激振动方程为:
3 利用Mathematica仿真模拟
指出当系统处于较低能级时,系统是近可积的,等值曲线和数值仿真接近,当系统处于较高能级时,系统的运动状态是混沌的。安宇[4]指出系统在较高能量时,初值的一点变动对系统的运动状态有很大影响。文献5指出可以通过Mathematica的NDSolve求解器求解该方程。下面将使用Mathematica来探究初值变化对机器人腿部运动状态的影响。
3.1 研究和的影响
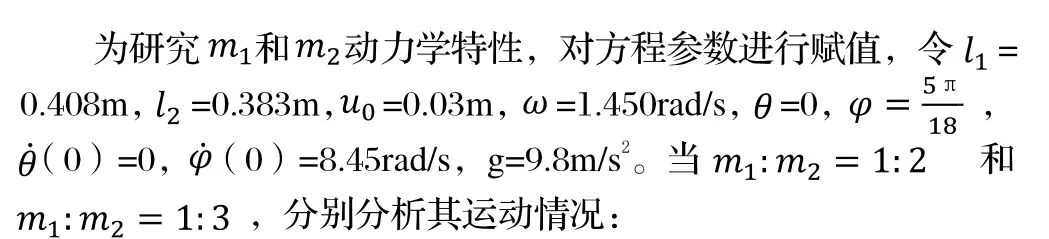

图12 计算理论微分方程
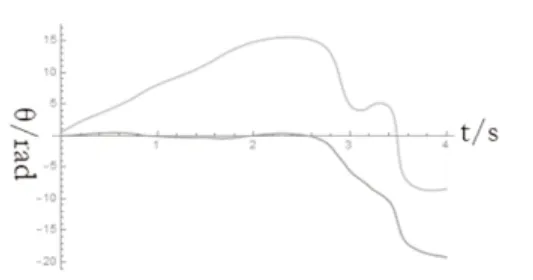
图13 计算理论微分方程
3.2 研究角速度的影响
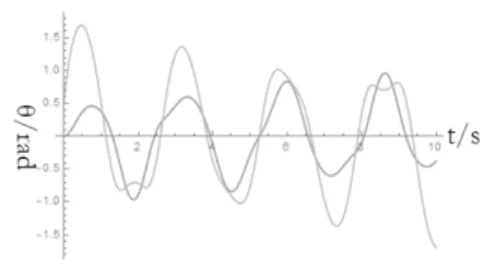
图14 计算=5rad/s理论微分方程
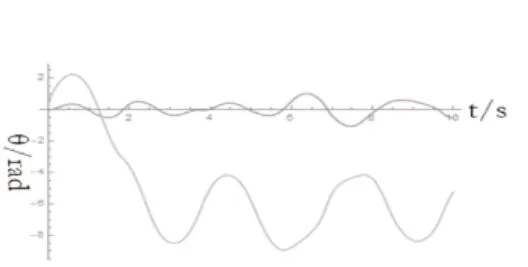
图15 计算 =6rad/s理论微分方程

图16 计算=7rad/s理论微分方程
3.3 研究简谐运动频率的影响

通过图17~图19我们可以发现当ω>2.5rad/s时,机器人腿部模型不能稳定运动,一段时间后,产生混沌现象。
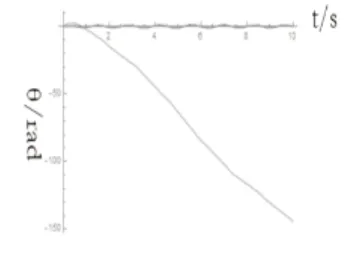
图17 计算ω>2.2rad/s时

图18 计算ω>2.3rad/s
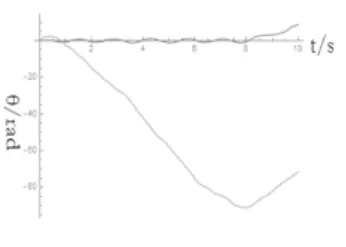
图19 计算ω>2.5rad/s
4 结论
本研究对机器人双腿进行了的简化的“双摆模型”的理论和实验的分析得出以下结论:①图像可以看出,在一个周期内系统机械能守恒,所以理论可以使用保守力系拉格朗日算出微分方程。都有周期性变化:在平面里左右摆动;绕周期性运动。②通过仿真与计算得出时经过一段时间后,出现混沌现象。机器人双腿装置中膝盖处质量与足部质量之比需小于时,机器人双腿装置中足部角速度需小于等于6rad/s;6rad/s≤≤7rad/s时小球机械能不足,会产生回摆;故不能适用于机器人双腿装置;ω≥2.5rad/s时,系统经过一段时间后出现混沌现象。
