深度卷积神经网络的遥感影像水体识别
2022-12-15王国杰胡一凡张森茹易陈开南吴梦娟
王国杰,胡一凡,张森,茹易,陈开南,吴梦娟
1.南京信息工程大学 地理科学学院,南京 210044;
2.南京信息工程大学 遥感与测绘工程学院,南京 210044
1 引 言
水资源是地球生态系统中不可或缺的重要资源,是气候变化和生态系统演化的重要影响因素(朱长明等,2013)。快速精准地识别水体,对水资源调查、洪水监测及防灾减灾等有重要意义(张兵等,2021;盛永伟等,1994;王治华等,1992)。随着遥感技术的发展,高分辨率遥感成为目前水体监测的重要手段(殷亚秋等,2015)。传统遥感方法利用水体在不同波段的反射率差异来区分水体与非水体。McFeeters(1996)提出的归一化差异水体指数NDWI (Normalized Difference Water Index),能够较好地区分陆地、植被和水体,但在区分水体与建筑物方面较为薄弱;徐涵秋(2005) 提出了改进的归一化水体指数MNDWI(Modified Normalized Difference Water Index),针对NDWI的不足进行了改进,增强了对水体和建筑物的区分能力,但在区分水、雪以及山影时效果较差(Xu,2006);此外,Feyisa等(2014)提出了自动提取水体指数AWEI(Automated Water Extraction Index),显著地提升了水体识别效率。然而,由于水体指数法对于水体与非水体的阈值确定具有很强的主观性,这对水体提取结果的准确性和可靠性有很大影响。
除了传统水体指数,学者们也结合遥感影像的光谱、空间和纹理特征展开了相关研究。Yue等(2010)基于图像光谱、形状、纹理等特征,使用机器学习方法提取水体,但没有充分利用空间信息特征。也有研究利用面向对象方法提取水体(毕海芸 等,2012);机器学习方法也被应用到水体识别工作中,如基于反向传播BP (Back Propagation)神经网络的水体自动提取方法(杨文亮等,2012)。此类方法可以避免阈值选择带来的不确定性,但其特征选择也是一大挑战。
自从Hinton 等(2006)提出深度学习概念,基于深度学习的遥感识别方法获得广泛重视和迅速发展(王雪等,2018)。与传统方法不同,深度学习能够适应大样本学习,具有更高的灵活性和普适性(Liu 等,2017)。卷积神经网络CNN(Convolutional Neural Network)是深度学习的重要分支,近几年若干经典CNN 模型获得广泛应用,例如,Krizhevsky 等(2012)提出的AlexNet 网络模型,Simonyan 和Zisserman(2015)提出的VGG网络模型,He 等(2016)提出的ResNet 网络模型;最近Wang 等(2020b)提出的创新性HRNet网络模型。深度学习凭借其高精度、高适用性、高效率的优势,与传统遥感处理方法相比具有更高的可行性(尹宝才等,2015),因此在遥感领域得到了广泛应用。Saito 等(2015)提出一种卷积神经网络,对卫星遥感影像中的建筑物进行自动检测与提取;曲景影等(2016)提出一种基于卷积神经网络的光学遥感影像目标识别方法,该方法基于传统的LetNet−5 网络结构,利用卷积扩展技术将卷积运算转换为矩阵乘法,提高了目标识别的准确性和效率。以上这些方法在很大程度上促进了深度学习在遥感领域的应用,但目前在遥感水体提取方面的应用还较少。Wang 等(2020a)使用深度学习方法提取鄱阳湖流域水体,识别精度较高,表明深度学习在水体提取方面具有极大应用潜力。
基于高分一号卫星数据,本研究采用ResNet、VGG、DenseNet、HRNet 这4 种卷积神经网络提取地表水体信息,涵盖当前主流的图像分类网络结构。本研究所采用的DenseNet 网络结构,通过反卷积的方法来构建全卷积神经网络,并通过增加不同尺度的特征融合来增加特征利用效率,显著提高模型识别效果。本研究基于谷歌第二代机器学习系统TensorFlow构建ResNet、VGG、DenseNet、HRNet神经网络,并将其水体识别结果与NDWI水体指数法进行对比分析。
2 研究区、数据与方法
2.1 研究区概况
洪泽湖(33°06'—33°40'N,118°10'—118°52'E)位于江苏省西部、淮河流域的下游,是中国最大的平原水库型湖泊。洪泽湖流域属于典型的亚热带季风气候;受到季风影响,降水时空分布不均,集中于6—9 月份。洪泽湖是浅水湖,湖泊面积受水位影响很大(伏蝶和岳建平,2019),平水期水位约为11.3 m,汛期水位约为12.5 m;总面积超过1000 km2,不同季节和年份有较大波动。
2.2 卫星数据
本研究选用高分一号卫星WFV 多光谱相机的16 m分辨率影像。HRNet、DenseNet、VGG与ResNet的输入通道包括WFV 获取的蓝光、绿光、红光和近红外4个波段;NDWI方法则选择WFV传感器所获取的绿光与近红外两个波段。为使网络的数据标签具有普适性,选用不同月份的影像制作数据样本,用于训练模型。所采用高分一号遥感影像的成像时间为2016 年1 月26 日—11 月11 日;数据由中国资源卫星中心提供(http://www.cresda.com/CN/[2020−06−17])。
为制作水体训练样本,对不同月份遥感影像中的目标水体进行人工目视解译。解译时,不同透明度与浑浊度的自然湖体均认为是水体,而湖岸边缘围网养殖与芦苇覆盖区域则不认为是水体。为增加神经网络训练效率及准确率,对图像进行批量切割,生成大小为224×224的图像;对裁切后的样本进行筛选,删除无效样本,最终获得水体样本5574个。
2.3 研究方法
2.3.1 归一化差异水体指数
归一化差异水体指数(NDWI)是一种基于绿光波段和近红外波段反射率的水体识别方法(McFeeters,1996)。NDWI的计算公式如下:

式中,Green表示绿光波段的反射率,NIR表示近红外波段的反射率。在理想情况下,若NDWI 为正值,则表示水、雨或者雪;若为负值则表示植被;若为零则表示岩石或裸土。由于水体信息在绿波段的反射率较高,在近红外波段的反射率较低,因此,对这两个波段进行归一化运算,增强二者之间的差距,可以使水体信息更为突出(McFeeters,1996)。由于地表植被等因素的影响,分割水体与非水体的阈值一般不为0,本文采用OSTU 法来确定最优阈值(Otsu,1979)。OSTU 法也称最大类间方差法,是基于最小二乘法原理的一种自适应图像分割阈值确定算法。按照影像直方图计算各灰度级发生概率,选择一个灰度级记为T,将图像按灰度级分为两部分,即0−T 以及T−255,分别记为目标与背景,并计算目标和背景类间方差的最大值,以找到最优阈值。类间方差g的公式如下:

式中,图像总平均灰度值记为µ,µ0和µ1分别为目标和背景的平均灰度值,ω0和ω1为目标和背景的灰度比例。当g取到最大值时,所选择的T 即为最优阈值。本文中,当得到像素级的NDWI值时,将其拉伸为0 到255 之间的灰度值,然后计算最优阈值,从背景中分割水体。
2.3.2 卷积神经网络(CNN)
卷积神经网络是一种包含卷积层的神经网络模型(周飞燕等,2017),与普通浅层机器学习模型SVM(Cortes 和Vapnik,1995)相比,卷积神经网络具有更深的网络结构和更强的非线性特征拟合能力(卢宏涛和张秦川,2016)。在卷积神经网络中,图像作为结构中最低层的输入,信息依次进行传递,通过多层的学习自动挖掘数据中的信息。卷积神经网络具有较强的自动学习和特征表达能力,以VGG(Simonyan 和Zisserman,2015)、ResNet(He等,2016)、HRNet(Wang等,2020b)为代表的网络结构已被应用于图像处理领域。在强大的应用需求驱动下,这些模型的复杂度也越来越高。VGG 网络模型采用连续的3×3 卷积核;这种堆积的小卷积核对应着更多的非线性层,可以有效地增加神经网络的深度,从而提高分类精度;但是它不能无限加深网络,否则会因梯度消失或梯度爆炸而使网络退化(Simonyan 和Zisserman,2015)。为解决此问题,ResNet 网络模型使用快捷连接(Shortcut Connections),以一定方式将低级别特征映射到高层,在网络中增加了直连通道,允许原始输入信息直接传到后面的层中,使当前网络只需要学习上一个网络输出的残差,简化了学习目标和难度(He 等,2016)。但是,ResNet 网络模型每一层都有自己的权重,因此它具有更多的参数。
Huang等(2017)设计的DenseNet网络结构在ResNet 基础上做出改进,将其网络的每一层直接连接到前一层,实现了特征的重复利用,可以防止较小数据集的过度拟合;同时,它每一层生成的特征映射较少,与ResNet 模型相比在一定程度上减少了参数数量,这使得网络更容易训练。本文通过增加上采样结构,将DenseNet 构建为全卷积神经网络FCN (Fully Convolutional Networks),与普通的CNN 网络对特征向量进行的分类不同;FCN 将CNN 末尾的全连接层转化成了卷积层(寇大磊等,2019)。FCN 采用反卷积层对最后一个卷积层的特征图进行上采样(Upsampling),使它恢复到与输入图像相同的尺寸,从而可以对每个像素进行预测,同时也保留了原始输入图像中的空间信息,最后在上采样的特征图上进行逐像素分类(周飞燕等,2017)。
HRNet(Wang 等,2020b)将上述网络结构中的串行连接高分辨率与低分辨率网络的方式,改为并行连接,在整个训练过程中保持特征图的高分辨率,通过在高分辨率特征图主网络逐渐并行加入低分辨率特征图子网络,实现不同网络多尺度融合。
2.3.3 DenseNet网络模型
密集块DB(Dense Block)是DenseNet 网络的基本组成单元,其结构如图1 所示。DB 中间层为归一化—线性校正—卷积层(BN−ReLU−Conv),其作用为在卷积之前对图像执行批量归一化BN(Batch Normalization)和线性校正(ReLU),从而达到合并特征图时大小统一的目的(Huang 等,2017)。DB 中每一层的输入来自前面所有层的输出,即:
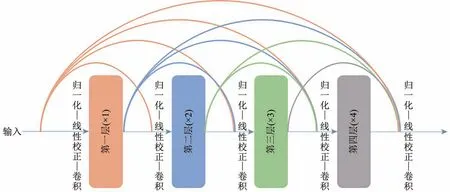
图1 Dense Block结构示意图Fig.1 Dense Block structure

式中,[X0,X1,…,XI−1]表示从第0层到第I−1 层的输出特征图的通道的合并(Concatenation),HI表示归一化—线性校正—卷积层。这种连接方式可以改善DenseNet网络中的信息流和梯度流。
图2所示为用于图像识别的基础DenseNet结构(Huang等,2017)。基于DenseNet的全卷积深度神经网络,是一种端到端的神经网络结构,可以实现高质量的图像语义分割(郑远攀等,2019)。本文采用的全卷积DenseNet网络结构如图3所示,其由下采样部分(图左半部分)、跳层连接(图中虚线部分)、上采样部分(图右半部分)组成。可以看出,与图2 所示经典DenseNet 网络结构模型相比,本文使用的网络结构增加了由反卷积构成的上采样过程,在保留图像空间信息的同时,使输出图像恢复到与输入相同的尺寸;并且,我们还增加了跳层连接,该结构可以把下采样部分中获得的特征信息引入上采样部分,一方面可以缓解梯度消失问题;另一方面可以解决网络退化问题;同时还可以对特征进行重复学习,提高特征利用效率。网络使用交叉熵损失函数(Cross−entropy Loss Function)作为损失函数,采用随机梯度下降法SGD (Stochastic Gradient Descent) 进行训练;对训练样本分60 组,每组训练1000 次。网络模型训练分阶段进行,初始学习率采用0.0001,训练30组时学习率缩小10倍,训练到50组时再缩小10 倍,从而降低网络训练误差。网络的增长率设为32,权重衰减设为10−4,内斯特洛夫动量设为0.9。

图2 基于图像识别的经典DenseNet结构示意图(Huang 等,2017)Fig.2 Classic DenseNet Structure for image recognition(Huang et al.,2017)
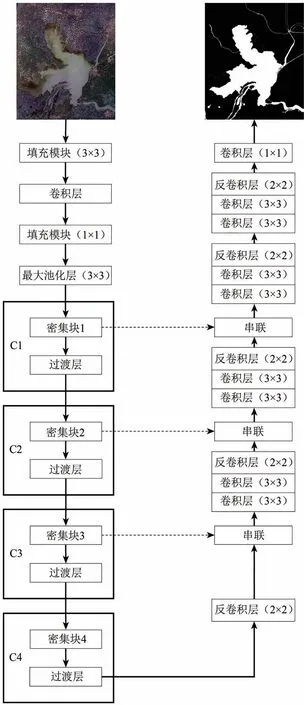
图3 本研究采用的DenseNet网络结构Fig.3 Modified DenseNet structure used in this study
2.3.4 评价指标
基于混淆矩阵(Confusion matrix)(Stehman,1997),本研究选择精确度P(Precision)、召回率R(Recall)、F1分数和误判率MRate(Misclassification Rate)来定量评价ResNet、VGG、DenseNet、HRNet网络和NDWI的水体识别性能。混淆矩阵可将样例根据真实类别与预测类别的组合划分为真正例TP(True Positive)、假正例FP(False Positive)、真反例TN(True Negative)和假反例FN(False Negative)。
精确度(Precision)为正确预测的正样本数与预测的所有正样本数之比:
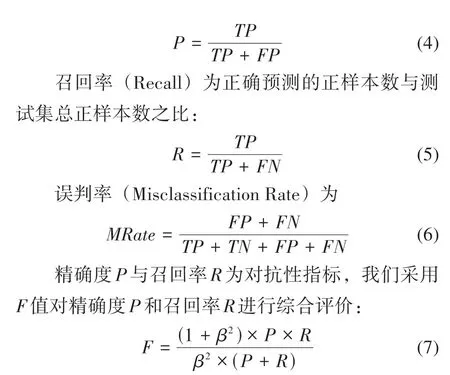
可以看出,F值是基于正确率和召回率的调和平均定义。β为权重系数;当β=1 时,表示正确率与召回率同等重要,标记为F1值,即

3 研究结果
3.1 实验参数确定
3.1.1 网络训练参数选择
神经网络的参数设置会影响实验结果。在神经网络的各项参数中,学习率是一个影响网络识别效率与识别效果的重要指标。学习率过大会导致过拟合,使网络无法收敛;学习率过小会使收敛速度过慢,虽然能够收敛,但容易陷入局部最小值中,无法达到全局最小。同时,训练集与测试集的比例TTP(Train−Test Proportion)也会对模型训练效率与网络精度产生影响。一般情况下,学习率通常选用0.001 或0.0001,训练集与测试集的比例通常设置为7∶3 或8∶2(Bengio,2012)(表1)。为确定适用于本研究的最佳网络参数,本文基于相同训练样本,分别采用不同学习率与不同训练比例对4种网络模型进行训练,分别确定其最佳网络参数。以DenseNet 网络为例,说明不同参数选择对训练结果的影响。
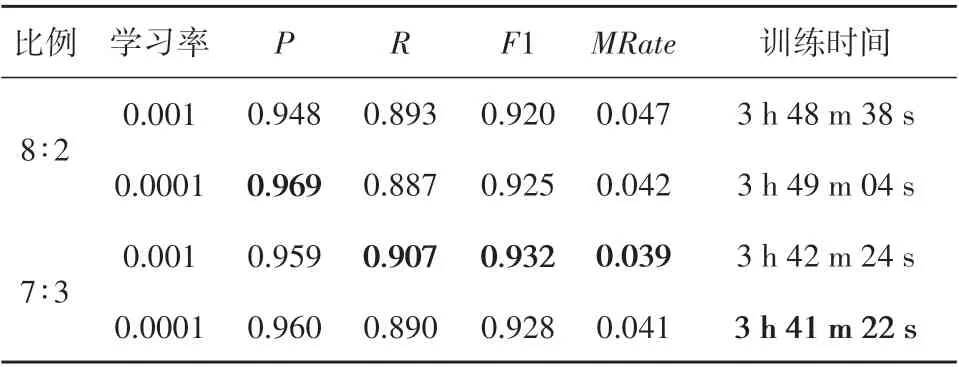
表1 DenseNet在不同参数组合情况下的识别精度指标及训练时间指标Table 1 Identification accuracy and training time of DenseNet with different parameter combinations
在神经网络模型训练过程中,用损失(Loss)函数来评估模型的预测值与真实值之间的差异程度,Loss 值的下降情况表示模型的识别效率及其准确性。图4 是4 种不同参数设置的DenseNet 神经网络训练过程中的Loss 函数下降曲线。在初始时刻,4条Loss曲线值较为相近,且在训练前期其下降趋势都较为一致。但随着迭代次数的增加,学习率为0.001 的两条曲线下降趋势更为明显,最终稳定在0.11 左右,表明学习率为0.001 的网络其性能表现更优;同时,对比相同学习率下不同TTP的Loss 曲线,发现TTP 为8∶2 时曲线下降程度更为明显。表1列举DenseNet不同参数组合情况下的精度评价指标。可以判定,设置学习率为0.001、TTP 为7∶3 时的网络性能最优。就TTP 参数来说,表1 中得出的结论与Loss 曲线得出的结论恰好相反。为进一步确定更为合适的TTP,我们在不同学习率下,分别设定TTP 为7∶3 与8∶2 进行水体识别,其识别结果见图5。
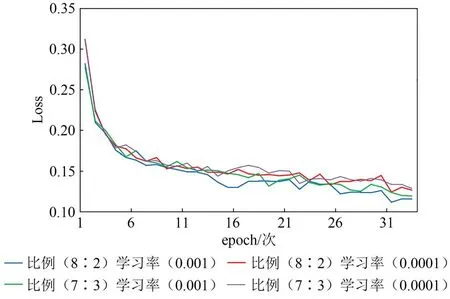
图4 DenseNet网络模型采用不同参数组合时训练过程中损失函数变化曲线(每个epoch包括1000次迭代过程)Fig.4 Loss function of DenseNet in the training process of different parameter combinations(each epoch includes 1000 iterations)
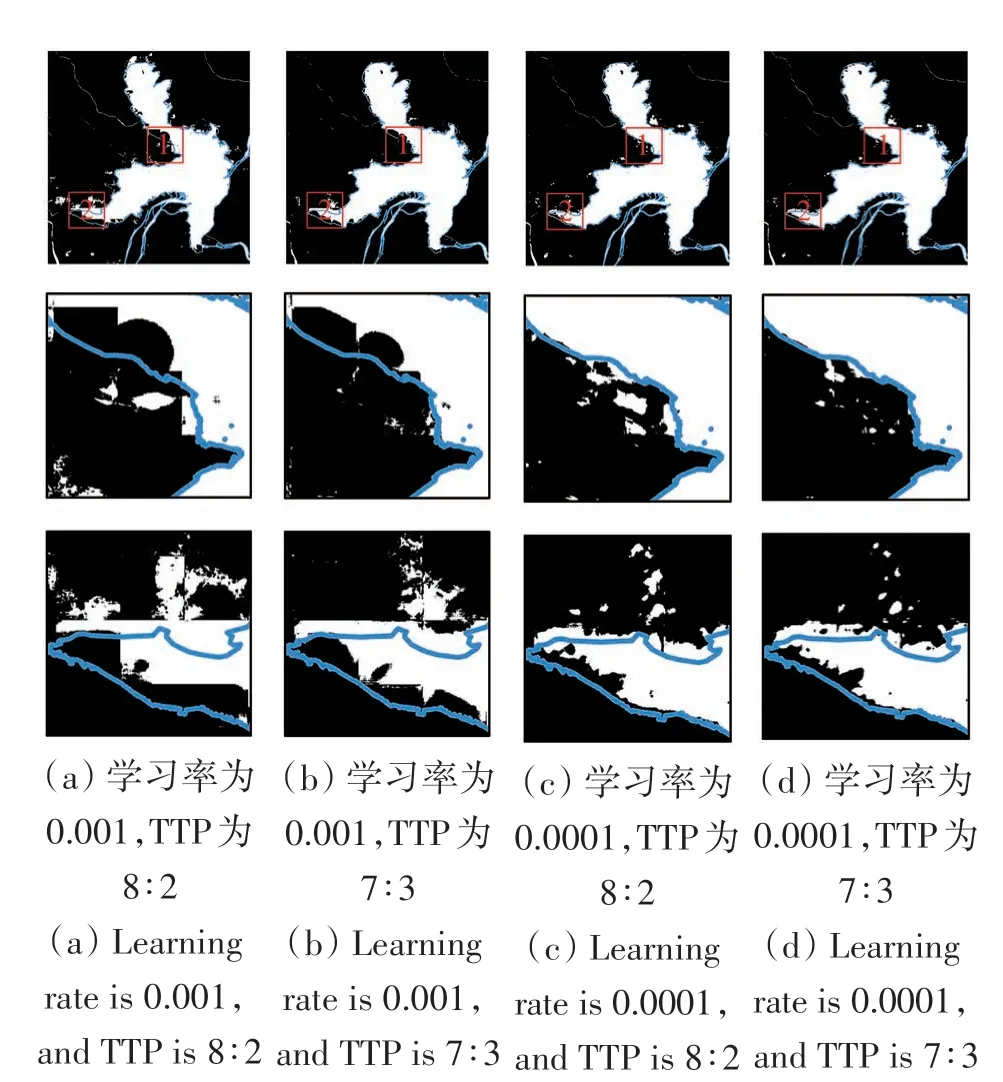
图5 DenseNet模型在不同参数组合下的水体识别结果(图中蓝色实线为人工提取岸线,红色矩形框为对比区域)Fig.5 Water recognition results of the DenseNet model under different parameter combinations;The blue solid line is the manually identified shoreline,and the red rectangular frames are the areas for comparisons
图5 所示,当学习率设置为0.001 时,无论TTP 为7∶3 还是8∶2,所识别的水体边界都存在与实际边界明显不符的情况,属于较为严重的判断失误。这说明,DenseNet 模型在学习率为0.001时训练效果更好,但在实际识别过程中却会出现重大误判,这是由于神经网络的过拟合现象造成的。因此,在选择参数时需要综合考虑其实际识别效果。当DenseNet 学习率为0.0001 时,其识别效果显然更优(图5(c)和5(d)),其水体边界更加符合实际情况。结合表1,TTP 为7∶3时的召回率、F1 值和误判率指标都优于8∶2,且训练时间更短,因此本研究选择学习率为0.0001、TTP 为7∶3的参数组合训练DenseNet网络。
3.1.2 不同阈值法NDWI水体识别结果比较
本文选用OSTU 自适应阈值法确定NDWI 的阈值。为验证OSTU 方法的优越性,本文将OSTU 自适应阈值与经验阈值(反复进行多次试验,与人工提取结果对比,确定阈值为0.35)提取的水体结果进行比较分析,如图6所示。图6(b)和6(c)中白色部分表示水体,黑色部分表示非水体;红色矩形框表示需要对比的局部区域。总体而言,两种方法都能对洪泽湖湖区的水体轮廓进行比较完整的提取;但经验阈值法在湖泊内部出现大量的线状与点状噪声,对比原始遥感影像判断,噪声位置均为湖泊水体。就湖泊完整性来看,OSTU阈值提取方法要优于经验阈值法。同时,经验阈值法会受到人为主观因素的影响,而OSTU 提取方法的阈值不会受到人为因素的影响。总体而言,OSTU 自适应阈值法的提取效果比经验阈值提取效果更好。因此,本文后续所使用到的NDWI水体提取结果,均采用OSTU自适应阈值法得出。
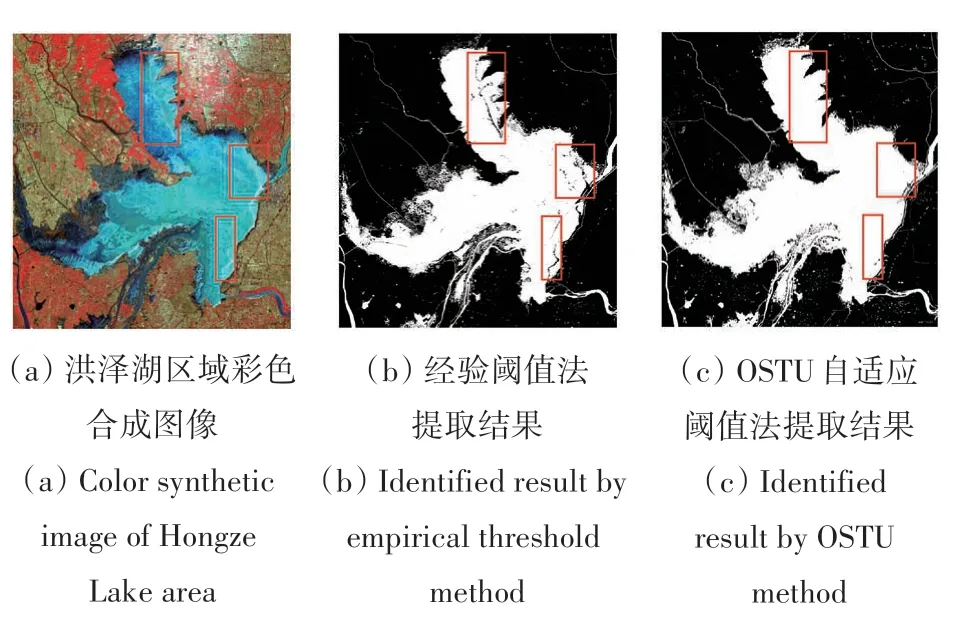
图6 NDWI提取结果图Fig.6 The NDWI result
3.2 NDWI与4种网络模型识别效果对比分析
3.2.1 图像识别效果
为了直观地对比分析不同网络的提取结果,图7(a)显示了2016 年1 月26 日高分一号卫星获取的洪泽湖水体区域遥感真彩色合成图像;图7 (b)—7 (f) 分 别 是NDWI、HRNet、VGG、ResNet、DenseNet 模型的识别结果。需要说明的是,后文所用遥感图像均采用真彩色合成图像,即R、G、B 通道分别采用高分一号卫星WFV 传感器获取的第三、二、一波段进行合成。
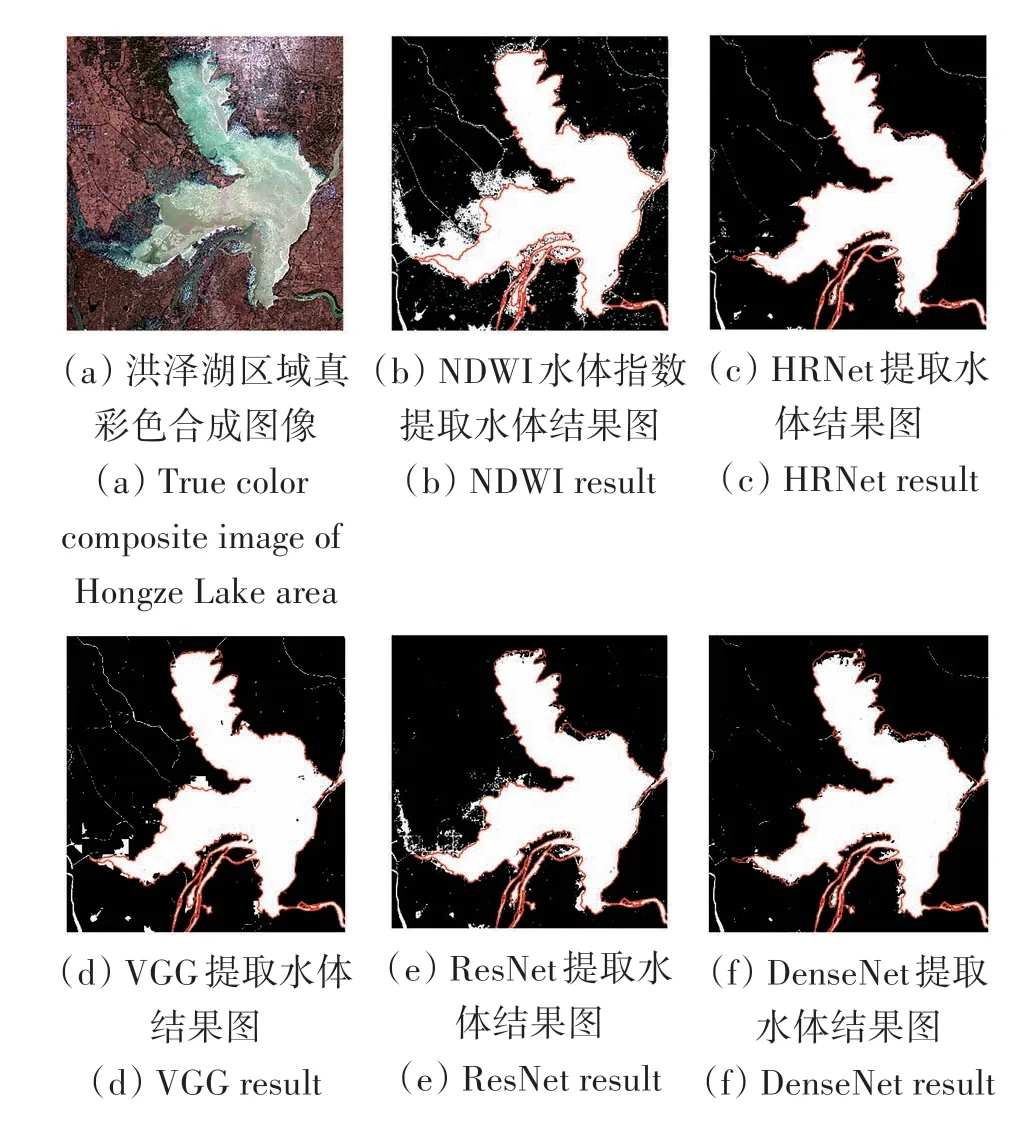
图7 不同方法水体识别效果对比图(红色实线为人工提取岸线)Fig.7 Water identification results by different methods(The red line is the manually extracted shoreline)
图7 显示,4 种神经网络方法识别水体区域的效果均明显优于传统的NDWI 水体指数方法。其中,NDWI识别的水体区域面积比真实水体面积大很多,其原因是NDWI方法将湖泊沿岸部分农田及城市区域误判为水体区域,导致NDWI在城镇地区及水陆交界线处识别效果较差,产生了非常明显的大面积噪声和误判斑块。ResNet 识别结果在边界存在较明显的噪声,且对细小河流的识别不够敏感。DenseNet、VGG 与HRNet 都可以较准确地识别水体区域,甚至可以把较为细小的河道分辨出来,其水陆界线较平滑,但同时也存在一定的误判现象;其中,VGG 识别的水体边界噪声点较多,且误判情况比DenseNet 与HRNet 更为明显;DenseNet 与HRNet 的提取结果较为接近,但DenseNet 在细小河流处存在一定的断线情况,而HRNet 识别结果在水体边界处存在一定的点状噪声。总体而言,DenseNet、VGG 与HRNet 的水体识别结果与实际情况较为一致,ResNet 较差;传统NDWI识别结果最差,误判情况非常明显,且水体边缘不清晰。这是因为NDWI水体指数法只利用绿光与近红外波段的信息,所利用的信息较少;而神经网络则充分利用了高分一号数据的红光、绿光、蓝光及近红外4个波段中的所有信息。因此神经网络方法的提取效果要显著优于NDWI水体指数法。
3.2.2 模型训练效率
ResNet、VGG、DenseNet 和HRNet 这4 种网络训练过程中的损失(Loss)函数曲线如图8所示。
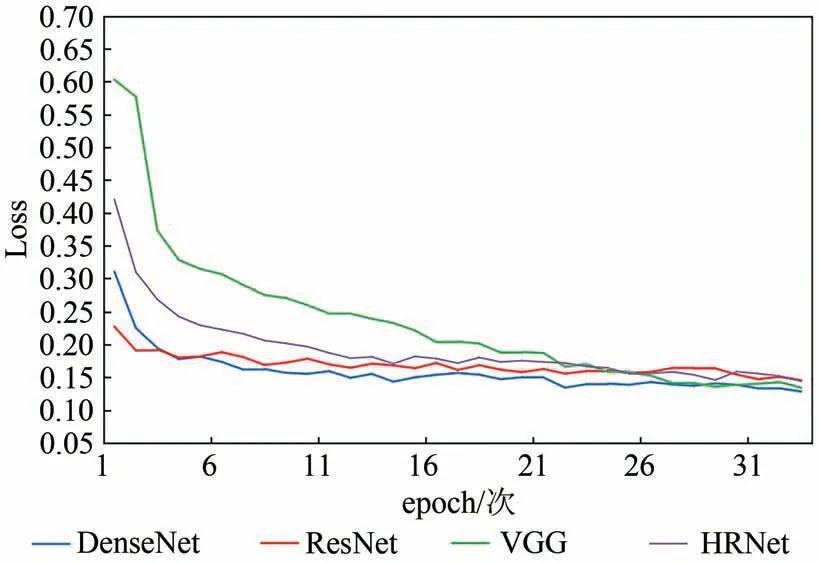
图8 4种神经网络模型(VGG、ResNet、DenseNet、HRNet)训练过程中损失函数的变化曲线(每个epoch包括1000次迭代过程)Fig.8 Loss functions during training processes of neural network models of VGG、ResNet、DenseNet and HRNet(Each epoch includes 1000 iterations)
由以上4 种神经网络的损失函数曲线可以看出,VGG 的初始Loss值最高,虽然下降速度最快,但是收敛最慢,最终逐渐稳定于0.15 左右;ResNet 的初始Loss 值最低,但是训练效率也最低,下降非常缓慢,最终也稳定于0.15 左右;HRNet初始值居中,下降速度略低于DenseNet,收敛速度适中,最终稳定在0.15 左右;而DenseNet 初始Loss 值较低,但训练过程中收敛速度最快,且最终稳定于0.13 左右,低于以上3 种网络。DenseNet网络训练效率最高,收敛性最好。这是因为DenseNet 在ResNet 和VGG 的基础上进行了优化,降低了网络冗余度,从而加快了训练效率,有效地缓解了梯度消失和过拟合问题,提高了识别精度;并且,本文DenseNet 网络的跳层结构加强了特征传播,能够更有效地利用地物特征。在实际应用中,网络的训练时间也是需要考虑的重要因素。4 种网络的训练时间如表2 所示。HRNet 的训练时间略长于DenseNet,DenseNet 所花费的训练时间要远远小于ResNet及VGG网络。
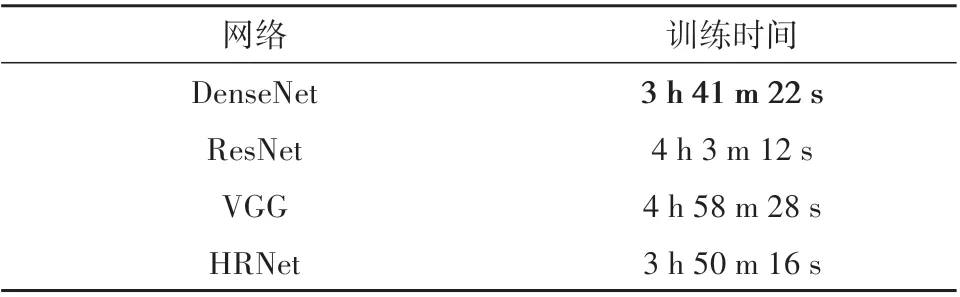
表2 4种网络训练时间指标Table 2 The training time of four networks
3.3 NDWI与4种网络模型识别指标对比
基于相同样本数据,得出4种神经网络模型及NDWI 的识别精度指标,表3 列举了各方法识别结果参数。在精确度(P)方面,DenseNet最高,达到0.960;最差为NDWI,仅为0.779,表明DenseNet识别水体区域的正确率最高,尤其显著高于传统的NDWI水体指数法。在召回率(R)方面,NDWI水体指数法的R值最高,达到0.981,表明它成功地识别了数据集中的大部分水体样本,但这并不说明其识别效果最好,因为NDWI提取的水体范围事实上超过了真实的水体范围,甚至包含了一些农田,导致其识别水体在真实水体中占比较大。DenseNet的R值最低,仅0.890。由于P值和R值是对抗性指标,无法准确地表明这几种方法的优劣,因而需进一步考虑综合指标F1 值。HRNet 的F1 值最高,为0.930;DenseNet 略低,为0.928;ResNet与VGG 的相近;NDWI 最低,仅为0.868。就误判率MRate 而言,DenseNet 误判率最低,仅为0.041;VGG 误判率最高,达到了0.048;NDWI 误判率略低于ResNet。
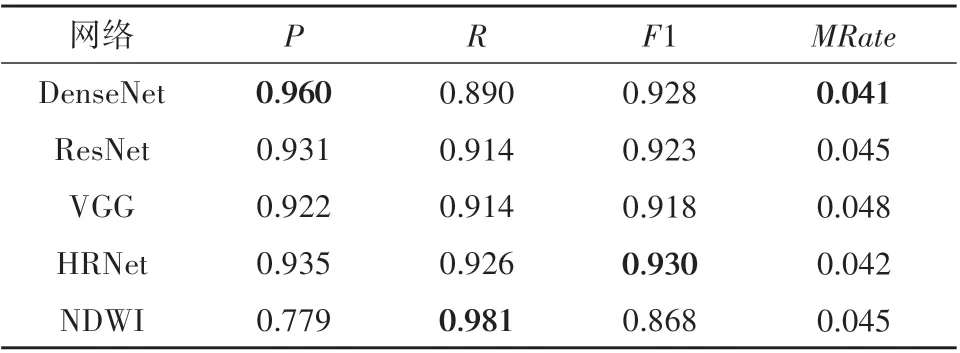
表3 4种网络及NDWI识别精度指标Table 3 Water identification results of four networks and NDWI
综上所述,神经网络的水体提取效果要显著优于传统的NDWI 水体指数方法;所采用的4 种神经网络模型中,DenseNet 综合表现最好,误判率最低,精确度最高,甚至优于最新提出的HRNet结构。所以,我们将仅分析DenseNet 网络的水体识别结果。
3.4 水体识别局部分析
对遥感地物识别而言,细节识别效果是非常重要的衡量标准。在3.3 节中已经表明,DenseNet网络对水体的识别结果最优,其局部结果见图9,通过9组局部图像并结合人工提取岸线,可以看出DenseNet 的水体提取效果总体来说与岸线的吻合度较高,对于陆地、河岸、大部分河道及湖泊的细部识别较为准确,能够较好地识别细小的河道,对于水田等有一定混淆性的地物也可以进行很好地区分;但是对于湖心岛屿、江心洲等的识别会出现误判的现象,可能是由于训练样本中此类地物数量较少,因此不能很好地分离水体与岛屿;此外,由于水体中泥沙、叶绿素等悬浮物的含量及河流流速等原因而导致水体颜色显著差异,如河流激流处水体呈现白色,流速较缓或静止的水体呈现蓝色或深蓝色,泥沙含量高的部分呈现黄色或褐色等,DenseNet都可以准确地识别。
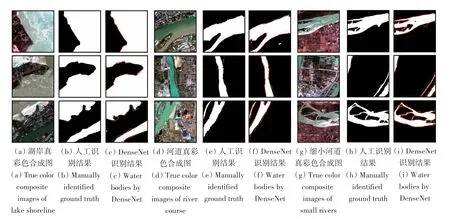
图9 DenseNet网络水体局部识别结果(红色实线为人工提取岸线)Fig.9 Detailed water identification results by DenseNet(The red solid line is manually identified shoreline)
3.5 水体季节变化
本文选用2016 年多个月份的遥感影像制作标签,训练出的网络可以对各个季节的水体进行识别。为说明DenseNet 对不同季节水体的识别效果,选择冬季和夏季各一幅图像进行水体识别,结果见图10。冬季湖泊形态较为清晰,而夏季水陆边界较为模糊,部分区域受到云的影响。DenseNet网络识别结果显示,洪泽湖湖面面积在冬季与夏季有明显的不同,冬季湖泊面积要大于夏季,夏季湖泊的轮廓发生了一定程度的收缩。2016 年1 月26 日 水体面积为1331.31 km2,而2016 年8 月31 日水体面积为1140.90 km2。由于洪泽湖水域面积随水位变化而变化,根据梅海鹏等(2021)的研究,可以得知洪泽湖年内水位变化呈单谷型,由于春季灌溉用水量大,同时为增强防洪能力在汛期到来前开闸放水,从而导致洪泽湖最低水位在5月底或6月初出现。6月至8月,降水量迅速增加,使水位快速上涨,从而使得湖泊面积扩大;但2016 年5 月16日水体面积为1236.24 km2,8 月湖泊面积比5 月16 日水体面积更小,这是因为2016 年夏季蒸发旺盛,蒸发量远高于降水量所致。根据江苏省气象信息中心提供的数据,该地区1月份蒸发量与降水量分别为29.9 mm与31.6 mm,降水量略大于蒸发量;而8 月份蒸发量与降水量分别为127.85 mm与73.53 mm,蒸发量远大于降水量,导致8月降水对湖泊的补给不足,湖泊面积缩减。
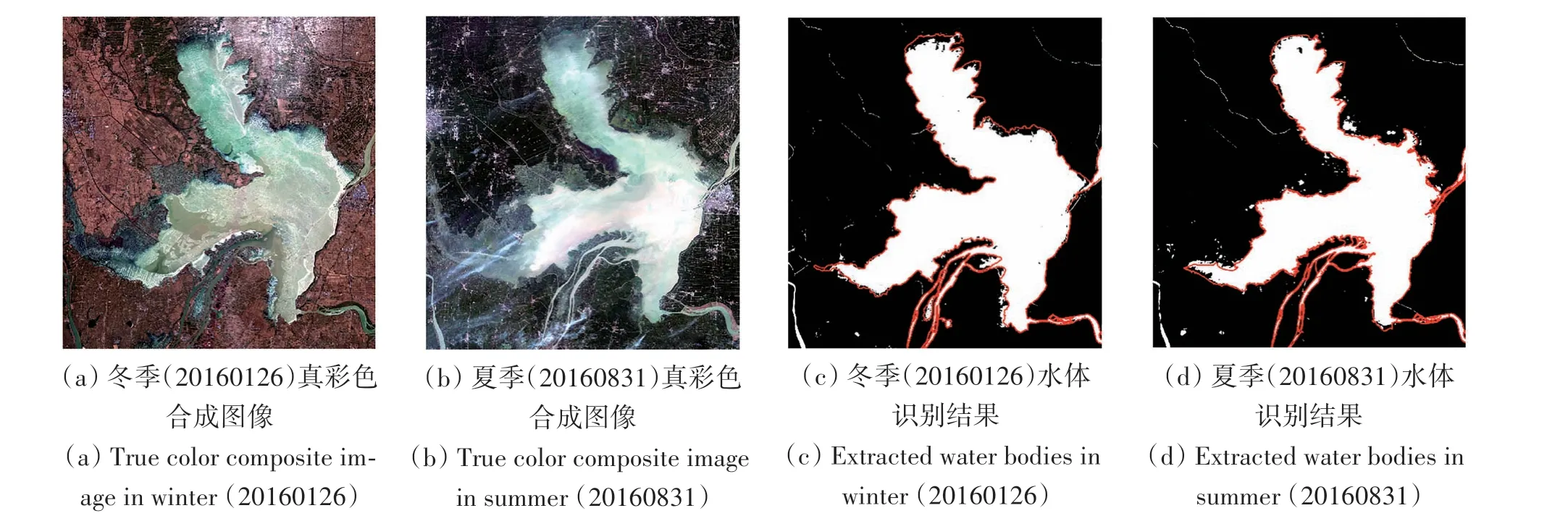
图10 DenseNet网络对冬季与夏季洪泽湖区域水体提取效果(红色实线为人工提取岸线)Fig.10 Water identification results by DenseNet in Hongze Lake area in winter and summer respectively(The red solid line is manually identified shoreline)
图11 能够更加清晰地显示夏季与冬季洪泽湖湖泊发生变化的区域。为进一步说明DenseNet 识别不同季节洪泽湖水体的准确性,对1 月份和8 月份水体变化明显的局部区域的遥感图像及其识别结果进行局部放大,见图12,其中白色表示水体,黑色为非水体。从局部区域来看,获取的影像中夏季湖岸边田块非常明显,且夏季作物生长旺盛,图中表现为深浅不同的绿色;相比冬季,能够比较明显地看出夏季田块的扩张以及湖岸向湖中央推移,从而使得湖泊沿岸线模糊不易辨别。对于这种现象,DenseNet 网络可以准确地将迫近湖岸的绿植与真正的湖泊水体进行区分,清晰地识别出水体边缘。而当影像在冬季表现出明显的水体特征,而在夏季则完全没有田块特征的情况下,DenseNet网络也能较好地识别出水体。

图11 岸线变化图Fig.11 Manually identified shorelines in summer(red line)and winter(blue line)respectively
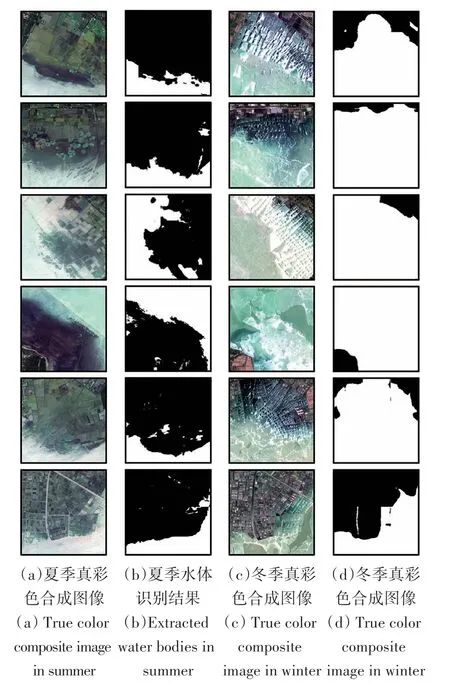
图12 DenseNet对夏季与冬季洪泽湖区域的水体识别局部效果对比图Fig.12 Detailed water identification results in Hongze Lake area by DenseNet in summer and winter
4 结 论
本实验提出了基于DenseNet 深度神经网络的水体提取模型,通过与经典的ResNet、VGG 神经网络,及新提出的HRNet 神经网络结构和水体指数法NDWI进行对比,得出了以下结论:
(1)卷积神经网络如HRNet、ResNet、VGG和DenseNet,在遥感水体识别方面远优于传统的水体指数方法。虽然水体指数法具有使用简单、过程迅速的优点,但识别精度相对较低,不能满足当前高精度遥感制图的需求;并且,水体指数阈值的选取受人为主观影响较大,难以确定最佳阈值,直接影响着识别精度。相较于水体指数法,基于卷积神经网络的水体识别虽然训练网络需要花费较长时间,但训练好的模型也可以快速识别出水体,且识别结果更加准确。因此,与传统水体指数方法相比,卷积神经网络展示了更优的应用前景。
(2)本文对经典DenseNet 网络结构加以改进,增加了上采样过程和全卷积网络内的跳层连接,缓解梯度消失和网络退化问题,并可进行特征重复学习。相较于经典的VGG 和ResNet 网络,DenseNet 网络在水体识别方面精确度P与F1 分数更高,误判率最低,本研究中分别达到了0.960、0.928与0.041,且对细部特征也有良好的识别能力;其识别效果甚至优于最新提出的HRNet 网络结构。同时,修改后的DenseNet 模型损失函数最低,且训练时间仅为3 h 41 m 22 s,远低于其他网络。
本文研究表明,DenseNet 在遥感水体识别领域有很好的应用前景;结合高时间、高空间分辨率遥感数据,可以实现高精度水体制图、河流湖泊面积变化和洪涝灾害监测等。但基于DenseNet网络的水体识别仍然存在一些无法避免的瑕疵,如识别结果偶尔会出现点状噪音,以及细小水道出现“断线”情况等;可能原因是样本总量还不够充足,样本数字标签准确度不足,以及遥感影像本身的一些局限性等。DenseNet 网络进行水体识别还有许多工作需要进一步完善:
(1) 本文使用的DenseNet 网络是在基础DenseNet 网络上进行结构优化,但此网络还可以进一步改进,提高该网络结构的识别效率。
(2)训练数据样本集不够丰富。若能够增加更大尺度的水体遥感影像资料作为样本集,如全国范围的水体影像,同时提高人工目视解译制作标签的精度,该网络的水体提取效果会更加准确,普适性更强。
总之,本文的研究表明,利用DenseNet 深度神经网络进行遥感水体识别具有较高的精度,显著优于传统的水体指数法。深度神经网络因其识别精度方面的优势,在水体遥感等领域具有广阔的应用前景。
