A-Train卫星传感器的台风云体三维结构构建
2022-12-15程崇慧陈斯婕郑卓凡董长哲苏林柯举王帅博仝博文刘东
程崇慧,陈斯婕,郑卓凡,董长哲,苏林,柯举,王帅博,仝博文,刘东
1.浙江大学 光电科学与工程学院,杭州 310027;
2.上海卫星工程研究所,上海 200240;
3.中国科学院空天信息创新研究院 遥感科学国家重点实验室,北京 100101
1 引 言
深对流云广泛存在于中尺度对流系统和热带气旋系统中,对整个对流层和平流层内的水汽和热量损益调控起着重要作用(Sherwood 等,2003)。对于台风云体来说,深对流云在距台风中心350 km内出现频率占所有种类云的70%以上(高洋和方翔,2018)。深对流云在台风降水云中的占比可达80%,对台风系统的降水性质有着重要的影响(傅云飞等,2007)。因此,研究深对流云对理解与其相关的热带气旋系统是必要的。
由于热带气旋等系统能够在短时间内快速移动并改变强度,给深对流云垂直结构的探测造成了一定的困难(Wang 和Wu,2004)。近几十年来,卫星遥感技术的出现为热带气旋研究提供了更多的数据支撑。例如,搭载于Aqua 卫星的被动传感器中等分辨率成像光谱仪MODIS(Moderate−resolution Imaging Spectroradiometer)能在全球范围内提供经校准和地理定位的辐射及云特性数据(Platnick 等,2003)。基于云滴在MODIS 近红外波段辐射吸收性质的差别,周著华等(2005)利用点聚图法分离出台风中的冰云与水云;崔林丽等(2020)基于第二代静止气象卫星风云四号(FY−4A)资料,建立了台风强度识别的深度卷积神经网络模型CNN(Convolutional Neural Network),并发现CNN 模型具有良好的高维非线性处理能力和算法稳定性,对不同台风强度等级识别精度均在97%以上。相比于被动传感器的宽幅辐射探测,主动传感器能通过发射激光脉冲,获得单条或者多条沿轨固定角度的廓线数据。例如,搭载于云—气溶胶激光雷达与红外观测卫星CALIPSO(Cloud−Aerosol Lidar and Infrared Pathfinder Satellite Observations)上的正交偏振云—气溶胶激光雷达可以分辨垂直剖面上细小颗粒的光学薄云和气溶胶(Winker 等,2009);搭载于CloudSat 卫星上的云剖面雷达CPR(Cloud Profile Radar)使人们不仅能获得深对流云的垂直剖面特征,还能反演剖面各高度层云的微物理量,为研究热带气旋的内部结构提供了全新的平台。
截至2019 年底,由美国海军研究实验室和CloudSat 数据处理中心联合发布的CloudSat 热带气旋过境数据集共收集到距离气旋中心1000 km 内的10032 次CloudSat 过境记录,其中50 km 内有493次,主要分布在大西洋、东太平洋、西太平洋、太平洋中心、印度洋和南半球6个海洋地区。目前对台风参数空间变化特征的研究大都采用了统计分析不同时空主动遥感廓线的方法,例如,Durden等(2009)基于CloudSat 和Aqua/AMSR−E 数据,利用高度轮廓频率图CFAD (Contoured Frequency by Altitude Diagram)统计分析了16个台风内部云墙区深对流云和层状云微物理参数的垂直变化特征;韩丁等(2013)统计分析了31个台风中不同距离环内部CloudSat雷达反射率和冰云微物理参数的CFAD,发现随着与台风眼距离的增加,冰水含量与冰粒子数浓度的最大值逐渐减小,有效粒子半径和分布宽度参数的概率较大值区不断抬升。但是,根据CloudSat热带气旋过境数据集,实际能够用于统计分析台风中心区域(距离气旋中心50 km 以内)深对流云参数可用的廓线数量非常少,只有493条。
随着同步或近同步飞行卫星序列(如A−Train)中卫星成员的相继发射,如何利用被动观测的宽幅探测能力拓展主动观测的垂直剖面数据并为特定区域提供更多的数据支撑,成为国内外研究方向之一。例如,Forsythe 等(2000)将地基观测到的云底高度向地球静止操作环境卫星的云分类覆盖结果传递,估算一定范围内的云底高;Miller 等(2014)基于相同类型的云具有相似的几何和微物理特性的假设,提出了云类型匹配CTM(Cloud Type Matching)算法,并将CloudSat 观测结果扩展到MODIS 的宽幅观测结果中,同时估算了MODIS观测区域中超级台风彩云的云底高度和液态/固态水含量变化剖面;Li 和Sun(2014)基于相似云顶压力CTP(Cloud Top Pressure)和云光学厚度COT(Cloud Optical Thickness)的云具有相同的云底高度的假设,提出了反演数据匹配RDM(Retrieved Data Matching)算法,并在对热带风暴和天气系统的应用中证明了可行性;Barker等(2011)提出了一种根据光谱辐射相似性,将星载主动传感器测量得到的廓线信息与被动传感器得到的辐射信息相互匹配,从而对主动轨道附近的二维平面进行三维拓展的方法,称为光谱辐射匹配法SRM(Spectral Radiance Matching)。在SRM 算法的基础上,Sun 等(2016) 通过引入多层云标识MLF(Multi−layer Flag)、CTP 和COT 等MODIS 云特性反演参数作为限制条件提出了CSRM算法,扩大了算法的应用范围,并发现对于复杂云体而言,CSRM算法相比SRM、CTM 以及RDM 算法具有更精确的云底高度估计值。
本研究利用CSRM 算法将CloudSat 和CALIPSO数据融合后的垂直分布信息向MODIS 探测到的数据幅面传递;通过进行台风事件中深对流云的三维结构构建,增加统计分析所研究的8个台风事件可用的廓线数量,进一步保证对深对流云统计分析的有效性。
2 数据描述
本论文根据CloudSat热带气旋过境数据集选择了2009 年—2016 年中CloudSat 轨道距离气旋中心50 km 内8 个热带气旋作为三维结构构建的对象,热带气旋的信息如表1所示。

表1 CloudSat过境时热带气旋的详细信息Table 1 Detailed information of tropical cyclones when CloudSat transits
图1为论文中研究的热带气旋的路径轨迹图以及CloudSat 过境时的位置和时间。值得注意的是,CloudSat 卫 星 分 别 于2009 年10 月16 日、21 日 对卢碧进行了两次近距离观测。为了便于论述,下文将2009 年10 月16 日的增强期卢碧称为卢碧1(LUPIT1),2009年10月21日的衰弱期卢碧称为卢碧2(LUPIT2);其中台风轨迹数据来源于日本气象厅数据公开网站https://www.jma.go.jp/jma/jma−eng/jma−center/rsmc−hp−pub−eg/besttrack.html[2020−05−19]。

图1 本文所研究的热带气旋的轨迹信息以及CloudSat过境时的轨道信息(其中CloudSat过境时的具体时间用字符yyyy−MM−ddTHH:mm表示;图中粉色线条表示热带气旋的路径轨迹,棕色圆圈表示CloudSat过境时台风的位置,可以发现总共有8个)Fig.1 Track information of the tropical cyclones studied in this paper and the orbit information of CloudSat during its transit,where the specific time when CloudSat transits is represented by the characters yyyy−MM−ddTHH:mm;the pink line in this figure represents the track of the tropical cyclone,and the brown circle represents the location of the typhoon when CloudSat transits.It can be found that there are a total of 8 such positions
本研究利用了来自CALIPSO、CloudSat和Aqua卫星的数据。3 颗卫星都是A−Train 卫星序列的成员,其中CALIPSO 和CloudSat 在前列,Aqua 在后列,它们的过境时间差大约在80 s 之内,因此能在近似的空间和时间上进行观测(Savtchenko 等,2008)。得益于所发射的频率为94 GHz的微波,搭载于CloudSat 卫星上的CPR 能穿透较厚的云层并
反演出云层底部的信息(卢乃锰等,2016)。但是,CPR 难以检测到高空稀薄的卷云。搭载于CALIPSO 卫星上的CALIOP 对较小的冰颗粒很敏感,能够探测到高空稀薄的卷云(Miller 等,2014)。因此,将CPR 和CALIOP 两个主动传感器进行融合能提供更加可靠的云类型判定和云相测定(Sassen 等,2008)。在本研究中,选取了CALIPSO 的Cloud Layer 1 km 数据产品和CloudSat的CLDCLASS、CWC 数据产品作为算法输入的主动数据。值得注意的是,为了保证三维构建结果的准确性,这里分别利用云气溶胶鉴别指数CAD score (|CAD_score|>70) 和数据质量Data Quality(good quality)参数对CALIPSO 和CloudSat 的像素点进行筛选和异常值去除。搭载于Aqua 卫星上的MODIS 能提供波长范围为0.4—14.4 μm 的36 个光谱带的辐射测量,沿卫星地面投影轨道的标定分辨率为250 m—1 km(MYD021KM)。MODIS 具有±55°的扫描范围,它的平均轨道高度为705 km,水平幅值为2330 km,并且每一到两天的数据就可以进行全球覆盖(Platnick 等,2003)。MYD03 中提供了相应的位置和辅助信息。2 级云产品(MYD06_L2)提供了包括云顶高度、温度、有效发射率和云相等重要的属性。本研究通过WorldView 确定了MODIS 过境所研究台风的时间段,并从NASA 数据网站中分别下载相应的MYD021、MYD03和MYD06_L2数据。为了保证三维结构构建的准确性,本研究采用了MODIS C6.1版本作为三维拓展算法的被动输入数据,该版本已实现了更新过的多层云检测方案,并为单个像素的多层云判定提供了确信度评价。
3 方 法
CSRM 算法的基本假设为:如果两个时空间位置彼此接近的像素点具有(几乎)相同的温度和湿度分布以及表面光学特性,并且在多通道的光谱大气顶端辐射上差异极小,那么这两个像素点在云及气溶胶的廓线分布上差异也是极小的(Sun等,2016)。区别于Barker 等(2011)提出的SRM算法,本研究所采用的CSRM 算法添加了MLF、CTP、COT、云顶温度、云顶高度CTH(Cloud−top Height)、云水路径、云有效半径和云有效发射率这8个参数作为额外的限制条件。得益于这些限制条件,CSRM 算法不论对于顶部云层还是底部云层的云底高度都有着更精确的估计值(Sun 等,2016)。CSRM算法的计算方法可概括为图2。
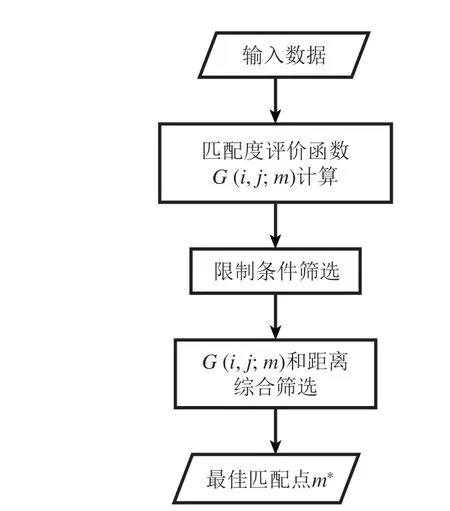
图2 CSRM算法获取最佳拓展匹配点流程图Fig.2 Flow chart of CSRM algorithm to obtain the best extended matching point
图2具体可以分为以下3个步骤:
(1)计算主被动像素点间的匹配度评价函数。设主动轨道的像素点为(i,0),初始位置即为(1,0),而待扩充的被动平面位置为(i,j)∈[−J,−1]∪[1,J],J代表了拓展范围的宽幅。对于待填充的像素点(i,j),其被动传感器观测到的多通道辐射强度为rk(i,j),k代表不同通道。将可用于匹配的主动轨道像素点的位置记为m,主被动像素点间的匹配度评价函数G(i,j;m)可表示为:
式中,m∈[i−m1∪i+m2]是沿主动轨道的主动像素点选择范围。
(2)利用以下5个限制条件筛选掉部分主动像素点:1)与被动像素点具有相同的地表类型;2)与被动像素点具有相近的太阳天顶和太阳方位角;3)与被动像素点具有相同的MLF;4)与被动像素点的MODIS 云特性反演参数的容忍度小于0.3;5)本身的质量评估结果较高。在这些限制条件中,MLF 采用(Joiner 等,2010)提出的区别单层云,多层云和深对流云算法的计算得出。云特性反演参数具体为CTP、COT、云顶温度、CTH、云水路径、云有效半径和云有效发射率,容忍度α计算公式为:
(3)将余下的主动像素点按匹配度评价函数G(i,j;m)计算结果由大到小排列,选择其中最小的前百分之十五的结果(如果余下的主动像素点过少,则选择G(i,j;m)最小的主动像素点作为最佳匹配点),将这部分结果按照欧几里德距离排列,取最小值得到最佳匹配点m*,这一步骤可表示为:

本研究除了采用CSRM 算法以外,还利用最近值算法和SRM 算法对台风进行三维结构构建。这两种算法流程图与CSRM 算法类似,其中,最近值算法在上述步骤3中去除了匹配度评价函数的筛选作用,只将距离作为筛选最佳匹配点唯一指标。SRM算法去除了步骤3中的限制条件,只利用匹配度评价函数和距离来筛选出最佳匹配点。
为了评价三维结构构建结果的准确性,本研究采用了Barker 等(2011)提出的盲区重建方法对结果进行测试;Chen 等(2020)在对夜间云拓展算法进行验证时同样用到了盲区重建方法。本研究利用该方法对算法进行测试的过程可概括为以下两步:(1)在CloudSat−CALIPSO 融合剖面中的一个像素点(i,0)周围设立一定的盲区DZ(Dead Zone),利用CSRM 算法在盲区外寻找一个最佳匹配点m*并将该点的廓线匹配替换给(i,0),循环所有i构建出重建剖面;(2)将CloudSat−CALIPSO 融合剖面与重建剖面进行比较并计算匹配率,并将该值作为评估三维结构构建效果的指标。匹配率计算公式为

式中,Nagree表示原剖面和重建剖面在相同海拔高度都显示为有云的像素点的个数,Ndisagree表示原剖面和重建剖面显示不一致的像素点个数。匹配率定量地反映了重建剖面与原主动遥感探测剖面相似程度。
4 结果与讨论
4.1 重建结果
为了评估CSRM算法在台风深对流云中应用的准确性并且证明该算法的优越性,本研究重建了强热带风暴灿鸿(CHAN−HOW)的剖面图,灿鸿的具体信息如表1 所示,同时分别利用最近值,SRM 和CSRM 算法计算了所有台风盲区重建结果的偏差值和深对流云匹配率。
图3(a)表示利用CloudSat与CALIPSO对强热带风暴灿鸿进行融合探测的结果,图3(b)、(c)和(d)表示利用CSRM 算法对灿鸿进行重建的结果,其盲区范围分别为100 km、200 km 以及400 km。为了更加方便地与SRM 的重建结果进行比较,这里用绿线和粉线分别表示SRM 算法对云顶高和云底高的重建结果。由图3(b)和3(c)可知,当盲区范围为100 km 和200 km 时,基于CSRM 算法所重建的深对流云云底、云顶高度与基于SRM算法所重建的结果相似;如图3(d)所示,当盲区范围增大至400 km 时,两个算法在纬度为12°附近对于深对流云云底的重建结果出现差别,其中CSRM 算法重建的剖面与CloudSat−CALIPSO联合剖面的匹配度更高,这是因为在更少的潜在像素点中仅仅通过多光谱无法准确挑选出合适深对流云,而CSRM 算法因为加入了MLF 限制条件,能去除与深对流云光谱近似像素点的干扰。计算匹配率可得,在100 km 时,SRM 与CSRM 重建的匹配率分别为88.0%和91.2%;200 km 时分别为86.1%和90.5%;400 km时分别为79.3%和89.8%。
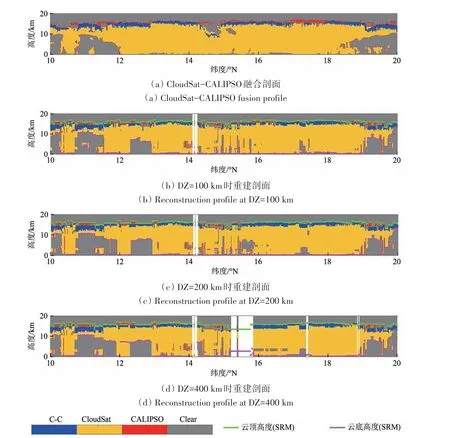
图3 强热带风暴灿鸿CloudSat−CALIPSO 融合剖面与盲区重建剖面(其中空白部分为无数据像素;蓝色部分为CloudSat和CALIPSO都探测到有云的区域;绿色和粉色的线为SRM方法重建出来的云顶和云底高度)Fig.3 CloudSat−CALIPSO fusion profile of severe tropical storm CHAN−HOW and dead−zone reconstruction profile.The blank part is the pixel without data;the blue part is the clouded area detected by both CloudSat and CALIPSO;the green and pink lines are the height of the cloud top and the cloud base reconstructed by the SRM method
为了评估三维拓展算法的准确度。本研究分别利用最近值、SRM 和CSRM 算法对各台风进行盲区重建测试。将3 种算法重建结果剖面的CTH、云 底 高 度CBH (Cloud Base Height) 分 别 与CloudSat−CALIPSO 的探测结果比较,并计算两者的平均偏差MD(Mean Deviation)和均方根误差RMSE(Root Mean Square Error),结果如图4所示。当盲区为100 km 时,CSRM 算法对于云顶高度和云底高度估计的平均偏差最小,分别为1.21 km 和1.57 km;SRM 算法次之,其值分别为1.60 km 和2.14 km;最近值算法最大,其值分别为1.64 km 和2.19 km。随着盲区范围的增大至200 km,3 种算法对于云层估计的偏差都有所增大,其中CSRM算法仍然最小,云顶和云底高度的平均偏差值分别为1.49 km 和1.81 km;当盲区范围继续增大至400 km时,CSRM 算法对于云顶和云底高度估计的平均偏差处于2 km 附近,而SRM 和最近值算法均大于3 km。由此可见,CSRM 相比于另外两种算法具有更广的应用范围,其对于较大的拓展距离,仍具有较低的云体高度估计误差。


图4 各台风重建剖面中云顶、云底高度相比于CloudSat−CALIPSO 探测结果的平均偏差和均方根误差Fig.4 The mean deviation and root mean square error of the cloud top and cloud bottom height in each typhoon reconstruction profile compared with CloudSat−CALIPSO detection result
表2 为所有8 个热带气旋深对流云匹配率具体数值。当盲区范围较小时,最近值、SRM 与CSRM算法盲区重建测试效果相差不大,随着盲区范围的增大,3 种算法的重建匹配率都有所下降,其中,CSRM 算法下降幅值较小,当盲区为400 km时,其匹配率仍能保持在85%以上。而最近值和SRM 算法的重建匹配率下降幅值较大,当盲区为400 km 时,其匹配率平均值分别在77.1%和78.3%附近。这一结果进一步证明了利用CSRM 算法三维结构构建时的优越性。
4.2 台风分析
图5(a)为CloudSat−CALIPSO 对台风彩云进行联合观测的剖面图,底图为MODIS 光谱波段R1(620—670 nm)辐射数据,梅红色的线为A−Train轨道在地面的投影。当A−Train 序列卫星经过经度为153°E,纬度为23°N 的位置时,CloudSat−CALIPSO联合探测剖面正好切过台风眼区域;图5(b)为利用CSRM 算法对CloudSat−CALIPSO 融合云剖面数据进行三维拓展的结果,其中紫色的长方形区域为运用拓展算法的范围。利用相同的方法对剩下的7 个台风都进行三维拓展。考虑到CSRM 算法对云底估计的准确度随着拓展距离的增加而降低(Sun 等,2016),同时又需要保证拓展距离能足够覆盖到台风所有的云体(所研究台风半径最大为500 km 左右)。因此,本研究将围绕主动像素点的被动像素点选取范围设定为600 km。

图5 对强热带风暴彩云进行三维结构构建前后对比图Fig.5 Comparison of before and after three−dimensional structure construction of strong tropical storm CHOI−WAN
图6 左侧为对2013 年10 月17 日台风范斯高(增强期)的三维廓线数据进行多角度切割的平面图。为了研究深对流云的水平分布特征,这里选择内圈层(距离气旋中心350 km,用粉色的线表示)作为研究范围,过气旋中心做4 条角间隔为45°且以圈层边界为起始的台风切线(分别为A—A'、B—B'、C—C'和D—D'),同时在切割线之间以顺时针方向依次定义了8块区域Ⅰ—Ⅷ。在接下来的研究中,将研究这8 块区域的深对流云参数特征。图6右侧为对应切割线的云层剖面图,自上而下分别与左图的4 条切线一一对应。比较4 张组图可知,图6 剖面A 深对流云占比最大,达到了80.3%且主要分布于剖面图右侧区域,图6 剖面C和D 占比次之,分别为53.2%和55.3%,占比最小为图6 剖面B,其值为40.3%。进一步计算台风范斯高Ⅰ—Ⅷ这8个区域的深对流云占比,结果分别见表3 第4 行所示,平均值为51.9%,标准差为13.4%;其中,占比最高区域Ⅱ、Ⅵ相对于台风眼对称,它们的占比分别为67.8%和67.9%。
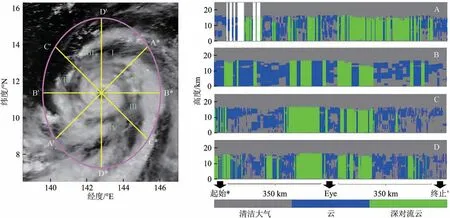
图6 对台风范斯高三维拓展结果进行多角度切割的云剖面图(右图中的A、B、C、D分别对应左图中的A×A'、B×B'、C×C'、D×D'切线所在的云层剖面图)Fig.6 Cloud profiles of the multi−angle cutting of the three−dimensional expansion result of Typhoon FRANCISCO.The A,B,C,and D in the right panel correspond to the cloud profiles where the A×A',B×B',C×C',and D×D'tangents are located in the left panel,respectively
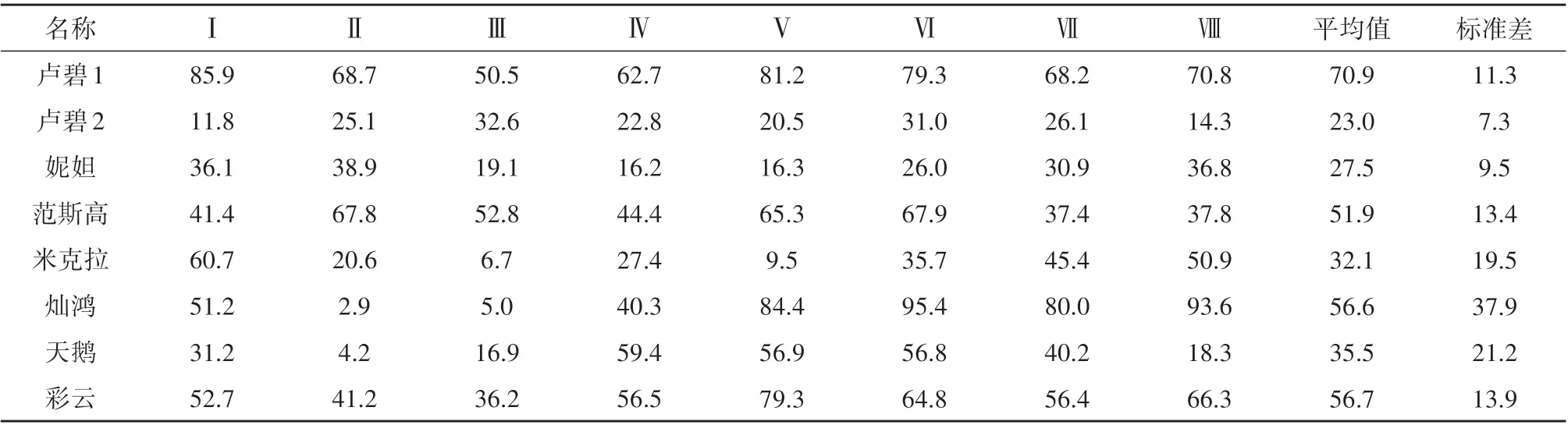
表3 各台风I—Ⅷ区域中的深对流云占所有种类云的比例Table 3 Proportion of deep convective clouds in each typhoon I—Ⅷarea to all types of clouds/%
依次计算剩下7个热带气旋不同区域的深对流云占比得表3。由表3 可知,不同热带气旋不同区域有着较大的差别。其中,台风卢碧1(增强期)的8 个区域深对流云占比的平均值为70.9%,标准差为11.3%,占比最高的两个区域为Ⅰ和Ⅴ,同样相对于台风眼对称;与卢碧1 相比,卢碧2(衰弱期)深对流云平均占比显著降低至23.0%,并且不同方向扇形区域间变化更小,其值为7.3%;台风妮妲(衰弱期)的情况同台风卢碧2类似,它的平均占比和标准差分别为27.5%和9.5%。与台风相比,强热带风暴的深对流云平均占比在30.0%—60.0%之间,并且不同方向扇形区域间的变化更大(平均标准差达到了23.1%),其中,强热带风暴灿鸿的不同方向之间的深对流云占比差别最大,达到了37.9%。进一步分析表3 可得,增强期台风卢碧1 和范斯高深对流云占比平均为61.4%,沿各方向标准差平均为12.4%。相比较而言,衰弱期台风卢碧2和妮妲的占比和标准差均有所下降,分别为25.3%和8.4%。对于台风而言,热带风暴米克拉、灿鸿、天鹅和彩云中深对流云占比均值为45.2%,并且在不同方向下差别更大,标准差达到了23.1%。
CSRM 算法将主动卫星的单廓线测量数据拓展到三维空间,增加了统计分析深对流云内部微物理参量可用的廓线数量,进一步保证对深对流云统计分析的有效性。为了比较不同阶段时深对流云的微物理特征,本研究利用CSRM 算法对处于热带低压时期的卢碧(下文记为卢碧0 或者LUPIT0,其未被列入CloudSat过境数据集)进行廓线拓展并与上述研究的卢碧1、卢碧2 三维廓线数据进行比较。
图7中(a)—7(i)分别为卢碧0,卢碧1和卢碧2中深对流云各微物理参数如冰云有效粒子半径IER(Ice Cloud Effective Radius)、冰水粒子数浓度INC(Ice Water Number Concentration)和冰水含量IWC(Ice Water Content)等的垂直分布图,其中Ⅰ—Ⅷ分别对应图6左图分区中的廓线数据。比较图7(a)、7(d)和7(g),结果表明:处于热带低压期、台风增强期以及台风衰弱期这3个阶段的卢碧中深对流云的IER都随着海拔高度的增加而增加,在高度为14 km附近时,IER都达到了最大值,其值分别为10 μm、10 μm、14 μm左右,并且同一台风中不同区块间的差别不大;由图7(b)、7(e)和7(h)对比表明,这3 个阶段卢碧中深对流云的INC都先随着海拔高度的增加而增加,到达凝结层(5—6 km 左右)时,又随着海拔高度的增加而降低,不同阶段台风深对流云的INC都在凝结层附近存在一个最大值,并且对于不同区块而言,最大值也有着较大差别;区别于IER 和INC,不同阶段台风中深对流云的IWC 的垂直分布特征差别较大,分别如图7(c)、7(f)和7(i)所示,在热带低压阶段时,IWC 的高值区位于8—10 km 附近,其不同区块间垂直分布曲线差别比较大,在高值区平均值达到了580 mg/cm3。在增强期台风阶段时,IWC的垂直分布曲线趋于扁平化(尤其对于Ⅱ和Ⅲ区域),其不同区块最大值平均值为300 mg/cm3。在衰弱期台风阶段时,IWC 的垂直分布曲线在高度11—14 km 附近重新出现了明显的高值区,其不同区块最大值平均值为560 mg/cm3。
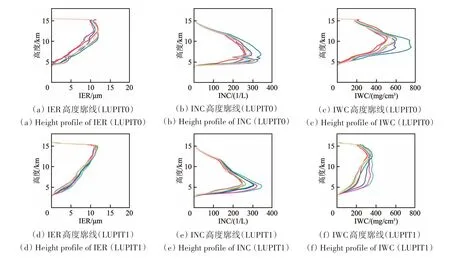

图7 不同阶段卢碧中各区域深对流云的IER、INC和IWC平均值的垂直分布特征(Ⅰ—Ⅷ对应图6左图分区)Fig.7 Vertical distribution characteristics of the average values of IER,INC and IWC of deep convective clouds in different regions of LUPIT in different stages(Ⅰ—Ⅷcorrespond to the partitions on the left picture of Fig.6)
5 结 论
本研究利用CSRM算法构建西太平洋台风云体的三维结构模型,同时分析了台风云层在不同发展阶段水平分布特征和微物理特征。利用CSRM 算法对台风云体进行三维拓展的意义在于增加统计分析可用的同一台风事件廓线数量,有助于分析复杂云系统中的云分布及微物理参数特征。盲区测试结果表明:随着拓展距离的增加,传统SRM算法对深对流云的匹配率迅速下降,而利用CSRM算法的匹配率仍然能保持85%以上,这一结果保证了对深对流云水平分布特征和内部微物理参数特征分析的有效性。
对所研究热带气旋中深对流云水平分布特征和内部微物理参数特征的统计分析结果表明:(1)增强期台风卢碧1 和范斯高深对流云占比平均为61.4%,沿各方向标准差平均为12.4%;衰弱期台风卢碧2和妮妲的占比和标准差均有所降低,分别为25.3%和8.4%;相比于台风,热带风暴米克拉、灿鸿、天鹅和彩云中深对流云占比均值为45.2%,在不同方向下差别更大,标准差达到了23.1%。(2)由图7 所示,台风内部深对流云的IER 与高度成正比,INC在凝结层以下与高度成正比,凝结层以上与高度成反比。分析图7(c)、(f)以及(i)可知,随着热带低压演化为台风,其内部深对流云中的IWC 高值区由云中部逐渐向云顶部聚集,并且当台风从增强期演化为衰弱期时,其云顶部的IWC最大值略微增加。
CSRM 三维拓展算法的本质是利用主动和被动传感器的测量结果识别出的深对流云、周边云层及无云像素,并根据被动传感器所获取的辐射及物理特性,将主动传感器轨道上单像素数据逐一匹配填充给非主动轨道上的像素。这意味着CSRM算法无法在非主动轨道像素上构建出未在主动轨道剖面中出现的云体垂直结构,进而限制了算法所构建的三维结构的准确度。针对台风这一类周期性且具有一定相似性的天气系统而言,利用主动传感器的历年廓线数据建立台风云体数据库并将该数据库作为算法的主动输入是提升算法精度的思路之一。
