面向任务的载人潜水器人机交互信息结构分析
2022-12-14余隋怀陈登凯朱梦雅
王 卉,余隋怀,陈登凯,叶 聪,张 伟,朱梦雅
(1.工业设计与人机工效工业和信息化部重点实验室(西北工业大学),西安 710072;2.中国船舶科学研究中心,江苏 无锡 214000)
载人潜水器驾驶舱系统结构复杂,各子系统相互关联,潜器驾驶作业过程中潜航员除机械操纵外,还要对舱室内任务相关各类信息资源进行管理与监控,是一个密集人机交互过程[1]。由于长久的地面生活,人们习惯相对于水平面的视距判断,在视域有限、地况复杂的深海环境下进行立体空间航向、航距、避碰等信息的准确判断较为困难,为潜航员任务信息处理带来了风险与挑战[2]。因此研究载人潜水器潜航员认知内面向任务的人机交互信息结构,对优化人机交互过程具有重要意义。
目前载人潜水器相关研究多侧重于材料、结构及机械性能等方面[3-5],在人因效能方面,有研究从生理舒适性角度,通过优化舱内物理环境来提升人因效能,例如张帅等[6]针对深海载人潜水器强约束条件下舱室空间舒适性,提出基于虚拟仿真技术的舱室可视化空间舒适性多源复合评估方法。李洋洋等[7]对人员下肢循环与肌肉疲劳展开研究,以改善潜航员生理舒适性;或从潜航员脑力负荷与信息认知角度出发,设计实验研究不同任务环境下潜航员脑力负荷。例如石路等[8]通过分析不同界面位置下人员行为学指标和眼动数据,为舱室界面设计提供参考。殷昊翔等[9]模拟驾驶作业对潜航员脑力负荷影响,为潜航员的实际训练提供参考。但较少有研究从引起潜航员认知负荷的根源,即实际任务过程中潜航员对交互信息的认知与处理的角度开展人因相关研究。
因此本文从多要素复杂系统分析的角度,提出面向任务的载人潜水器人机交互信息结构分析方法,构建潜航员认知基础上的载人潜水器人机交互信息系统多层递阶结构模型,从模型结构特征、要素层级关系、影响脉络及权重等方面进行讨论,为深入分析潜航员对任务相关交互信息的认知与处理,合理化人机交互过程提供理论依据。
1 面向任务的载人潜水器人机交互信息结构分析方法
从直观角度看,复杂系统可划分为复杂拓扑网络系统,如电网系统[10]、交通运输网[11]等,和可用拓扑结构描述的无显著网络特征复杂系统,即载人潜水器驾驶舱一类的舱室人机交互信息系统[12]。从多要素复杂系统的视角审视驾驶舱人机交互信息空间为载人潜水器人机交互信息处理过程研究提供了更多的研究方法与途径。
载人潜水器驾驶舱任务相关人机交互信息要素繁多且要素间关系复杂多变,为尽可能还原实际任务中潜航员信息处理过程,克服因缺乏客观理论依据带来的信息获取偏差,本文引入决策阶梯模型(Decision ladder,DL)作为获取任务信息要素及关系的模板。DL是认知任务分析(Cognitive work analysis,CWA)方法中的重要模型,它将用户对任务信息的处理视为一个建设性过程[13],并被广泛应用于潜艇、飞机、汽车等驾驶舱等安全关键人机系统决策任务分析中,被作为记录决策任务信息认知序列的工具[14]。因此,本文借助DL识别决策任务相关信息的优势,依据实际任务流程规范获取载人潜水器任务相关人机交互信息要素及要素关系。
复杂系统要素定量分析主要有因子分析法、层次分析法、主成分分析法、实验室决策分析方法(Decision-making trial and evaluation laboratory,DEMATEL)、解释结构模型(Interpretative structural modeling method,ISM)法等,与其他方法相比,DEMATEL-ISM方法结合了DEMATEL在区分要素属性特征、计算要素间综合影响关系方面的优势及ISM层次划分功能,可有效依据要素间关系[15],得到结构明确,脉络清晰的层级结构[16],满足本文对人机交互信息结构的分析需求。由已有DEMATEL-ISM相关研究可以看出,该方法在可达矩阵计算中,较多的可达矩阵判别式模糊了要素间的影响程度,且其修正因子的计算,在简化结构的同时导致了系统要素及关系的缺失,无法体现出各系统组成要素间因果影响脉络及致因程度。
因此,本文深入挖掘DL、DEMATEL及ISM方法在处理复杂系统要素及要素间关系的优势,提出基于DL-DEMATEL-ISM集成方法的载人潜水器人机交互信息结构研究架构,以某任务中海底环境信息、潜器状态信息及任务相关信息为输入,运用决策阶梯模型结合潜航员实际任务过程中的信息需求与处理过程,建立载人潜水器人机交互信息要素关系矩阵,基于DEMATEL-ISM方法,改进整体影响矩阵阈值计算及可达矩阵判别式,运用对抗轮层级换抽取方法,并引入模糊算子对计算影响值骨架矩阵,最终得到面向任务的载人潜水器人机交互信息多层递阶结构模型,具体研究架构如图1所示。
2 面向任务的载人潜水器人机交互信息结构分析过程
依据载人潜水器人机交互信息结构分析架构,结合DL、DEMATEL-ISM方法计算过程,得到本文研究流程,如图2所示。
2.1 基于DL获取人机交互信息要素及关系
2.1.1 人机交互信息要素获取
DL反映了专家用户执行任务时基于规则的行为过程,由任务活动(矩形)及活动信息结果(椭圆形)组成[17],可分为8项任务信息处理活动阶段:任务激活、环境观察、系统状态判断、系统备选状态评估、系统选择状态评估、目标状态确认、任务定义、任务流程[18],如图3所示。

图1 面向任务的载人潜水器人机交互信息系统结构分析架构

图2 载人潜水器人机交互信息系统结构分析流程
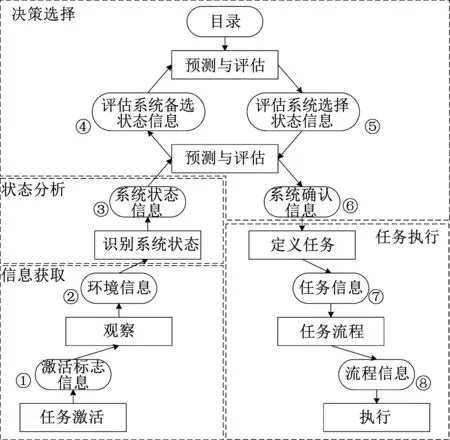
图3 决策阶梯
依据DL模型,邀请潜航员综合任务操作规则及实际任务流程,构建某任务决策阶梯,明确任务活动相关信息需求,将信息处理阶段记为Pk(k=1,2,…,8),共8个阶段。结合载人潜水器舱室人机交互面板及相关文件,将信息要素名称修正为专业表达,得到面向任务的载人潜水器人机交互信息要素集Z={Z1,Z2,…,Z31},见表1。
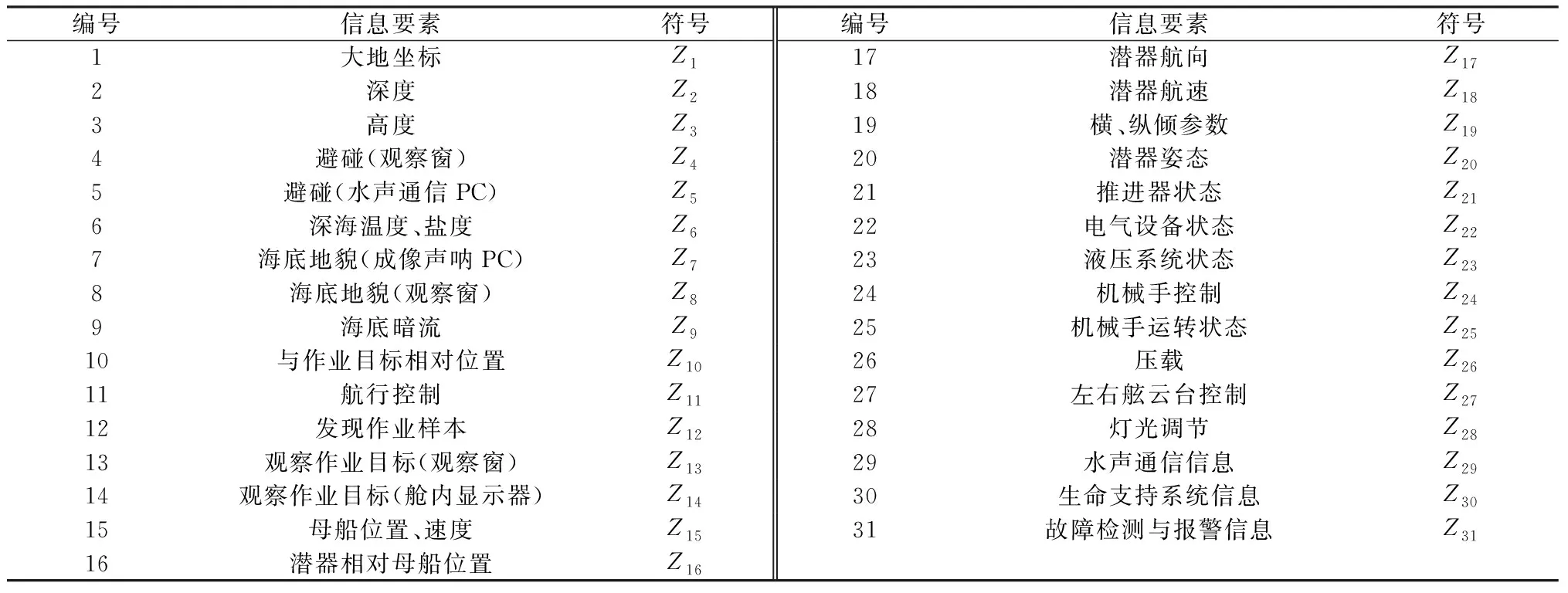
表1 任务环境下载人潜水器舱室人机交互信息要素
2.1.2 建立直接影响矩阵

(1)
遍历阶段Pk所有信息要素,依据式(2)得到该阶段信息要素直接影响判断矩阵Ak,即
(2)

综合各阶段要素影响关系,依据式(3)得到整个任务中信息要素直接影响矩阵A,即
(3)
式中,aij为Zi对Zj的直接影响值。
对直接影响矩阵A进行规范化处理得到规范化直接影响矩阵C,即
(4)

2.2 基于Dl-DEMATEL-ISM的人机交互信息综合影响矩阵计算及分析
2.2.1 计算综合影响矩阵
在复杂系统中,各要素间除直接影响外还存在相互波及等间接影响,结合DEMATEL-ISM集成方法,依据式(5),即
T=C(I-C)-1
(5)
得到人机交互信息综合影响矩阵T,式中I为单位矩阵。
2.2.2 信息要素属性分析
根据式(6)~(9)计算出该任务下信息要素Zi的原因度mi和中心度ni,即:
(6)
(7)
mi=fi+ei, (i=1,2,…,31)
(8)
ni=fi-ei, (i=1,2,…,31)
(9)
式中:影响度fi为综合影响矩阵T中Zi所在行行和,被影响度ei为矩阵T中Zi所在列列和,信息要素特征值计算结果见表2。
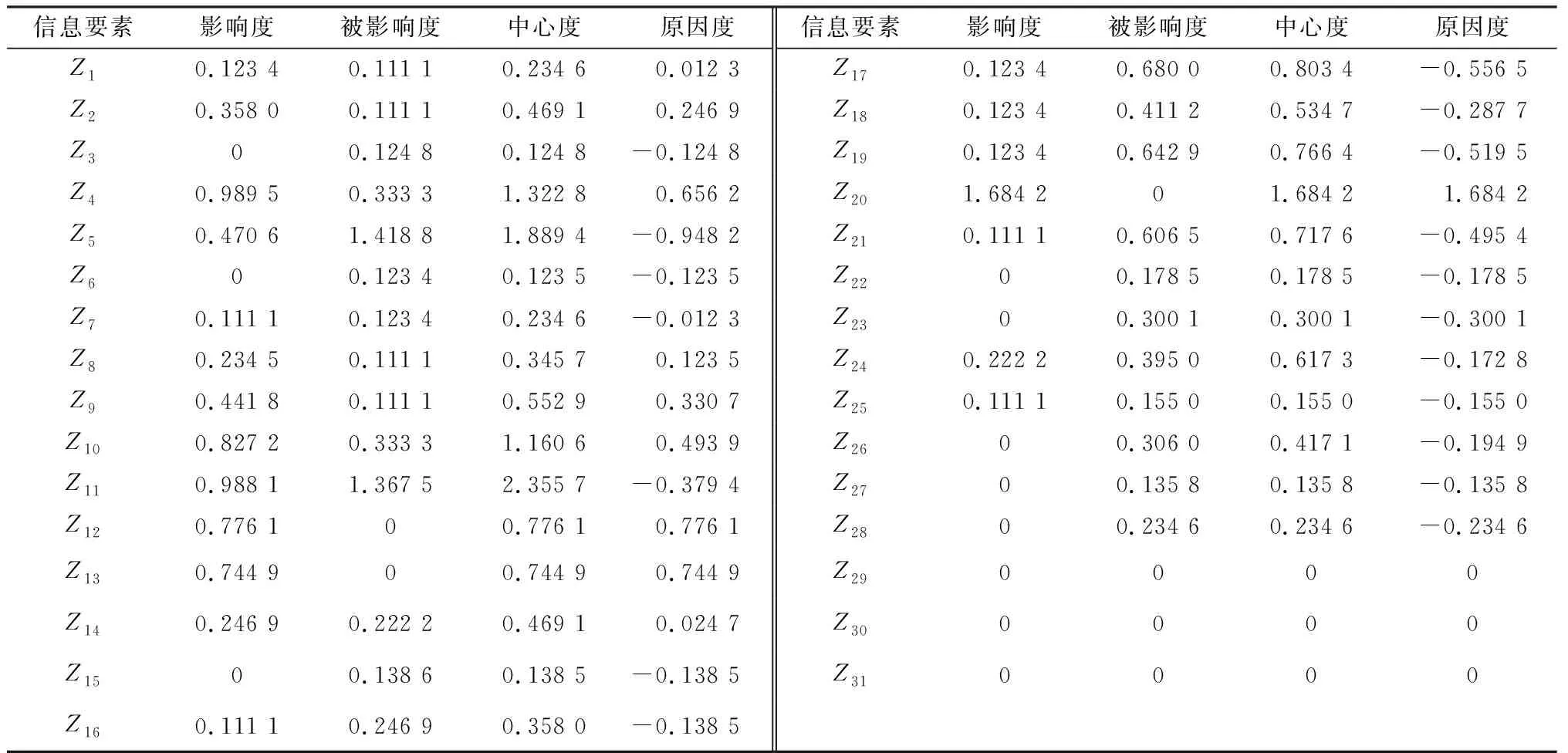
表2 载人潜水器人机交互信息要素DEMATEL分析结果
2.3 人机交互信息关系的可达矩阵计算及层级划分
2.3.1 可达矩阵计算
在综合影响矩阵T基础上,依据式(10)得到整体影响矩阵H,即
H=I+T
(10)
式中,I为单位矩阵。
基于整体影响矩阵H,确定修正因子λ,以舍去指标间影响程度较小的值,简化系统结构。
λ若取值过大,导致系统结构过于简单,若取值过小,指标间关系过于复杂,结构表达不清晰。因此,为不影响信息要素完整性并保证系统结构清晰,运用无监督学习算法K-means对λ阈值集合进行聚类分析,参照李克特量级确定K均值聚类计算质心数k=5,依照“小、较小、一般、较大、大”5个等级进行组别划分,得到阈值集合的类别预测及聚类中心值。依据聚类计算结果,确定修正因子λ取值为0.000 4、0.076 9、0.188 0、0.333 3、0.478 6,见表3。
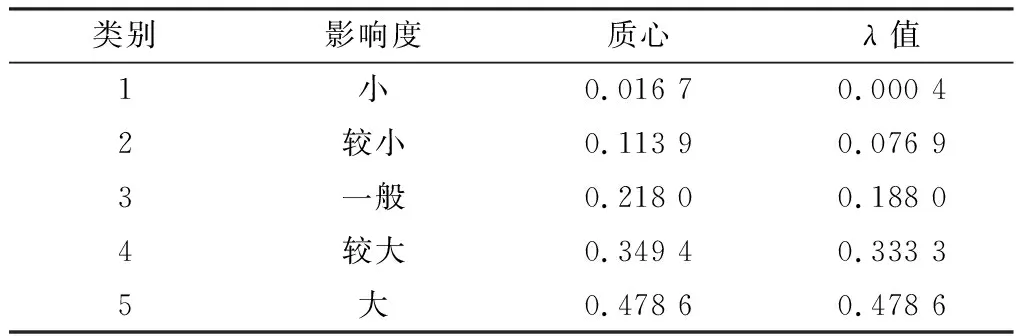
表3 可达矩阵修正因子计算结果
将修正因子带入整体影响矩阵H,得到不同λ对应截距阵(λ=0时,截距阵为矩阵H)绘制各截距阵节点强度变化趋势图(图4(a))及信息要素衰减图(图4(b)),如图4所示。
由图4可知,当λ为0.000 4时,其对应截距阵节点强度变化趋势与λ=0时最为接近,当λ=0.076 9时二者极为接近,同时确保了信息要素的完整性,因此确定修正因子为0.076 9,通过式(11)计算得可达矩阵R=(rij)31×31,即
(11)
式中,hij、rij分别为整体影响矩阵H及可达矩阵R中Zi对Zj的影响程度。
2.3.2 人机交互信息要素层级划分
按照式(12)~(14)求出信息要素的可达集M(Zi)、先行集N(Zi)和共同集O(Zi),即:
M(Zi)={Zj|aij≠0}
(12)
N(Zi)={Zj|aji≠0}
(13)
O(Zi)=M(Zi)∩N(Zi)
(14)
式中:M(Zi)为Zi直接或间接影响的信息要素集,
N(Zi)为直接或间接影响Zi的信息要素集。
为均衡层级结构,识别人机交互过程中的关键要素,提出综合对抗轮换层级要素抽取方法,即:
li={Zj|Zj∈Z-l1-…-li-1,M(Zj)=O(Zj)}
(15)
li={Zj|Zj∈Z-l1-…-li-1,N(Zj)=O(Zj)}
(16)
式中,li为第i次抽取所得要素集合,以结果-原因轮换抽取方法为例,首先依据式(15),抽取l1要素做为结果属性第1层指标,从可达矩阵中划除l1指标,依据式(16),抽取l2要素作为原因属性第1层指标,以此轮换顺序,直至所有要素被删除,由底至顶依次记为L1、L2、L3、…。同理,以相反的轮换抽取顺序求得原因-结果轮换层级划分结果,见表4。
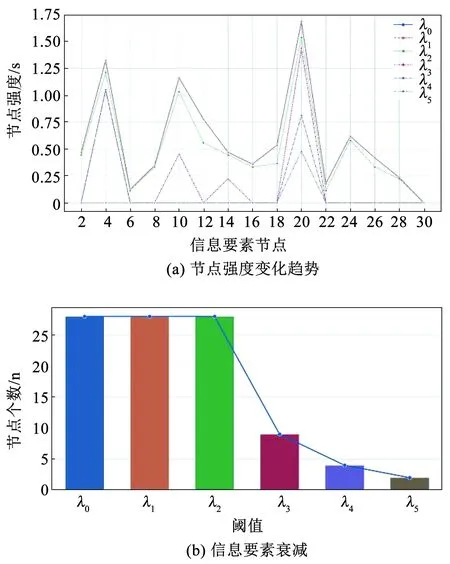
图4 不同λ下的交互信息系统节点数与节点度计算结果

表4 载人潜水器人机交互信息层级划分
2.4 载人潜水器人机交互信息层级结构模型构建
首先基于矩阵R,将要素及要素间关系视为拓扑结构节点及连边,Zi所在行rij≠0的列要素Zj为Zi出边终点,Zj所在列rij≠0的行要素Zi为Zj入边起点,可达因子rij视为要素连边权重,基于此绘制信息要素拓扑结构图。
其次,依据表2以椭圆形表示原因属性要素,以长方形表示结果属性要素,以菱形表示活动要素,以*标记中心度较大信息要素。
然后,结合表4对拓扑图进行层级划分,得到载人潜水器人机交互信息系统层级结构模型。
对系统层级结构初始模型进行缩边缩点处理,为避免缩点后信息要素及要素间关系的衰减,将回路要素视为一个节点,重构可达矩阵R1。
为保留要素间影响因子,引入模糊算子对——查德算子,依据缩边公式(17),计算得矩阵R′的含影响值骨架矩阵S′,即
S′=R′-(R′-I)2
(17)
还原回路中信息要素间关系,得到全因素影响值骨架矩阵S。依据骨架矩阵S对初始交互信息层级结构模型进行缩边处理,得到最终的载人潜水器人机交互信息层级结构模型。如图5所示。

图5 面向任务的载人潜水器人机交互信息系统层级结构模型
2.5 层级结构模型构建对比方案分析
与已有的基于DEMATEL-ISM方法的层级模型构建研究相关文献的不同之处主要体现在:
1)整体影响矩阵的阈值λ计算。整体影响矩阵阈值的确定,是可达矩阵建立的关键,以实现在一定程度上简化系统结构的同时,突出复杂网络系统要素间主要关系的目标,决定着最终的层级结构模型。目前已有的对整体影响矩阵阈值确定的方法主要有以下几种:
②以λ表示阈值,定义阈值λ=α+β,其中α、β分别为整体影响矩阵H中所有元素值的均值和标准差[20-21]。
③基于专家经验与建议给出阈值λ的可取值,如设置λ为0.05、0.07、0.10、0.15等,再依据阈值确定的两个原则,进行多次取值对比,分析不同阈值下的节点度,最终确定适合其相关研究的阈值[22-24]。
将上述确定阈值的方法应用在本文中,与本文所得阈值计算结果进行对比,分析结果见表5。
由表5可知,方法①所得截距阵,能保证节点度与节点强度相对稳定,但是只能够保留DEMATEL计算结果中中心度较大的节点。方法②能够剔除影响程度较低的节点间关系,保留较多节点,达到简化网络结构的目的,但连边关系的剔除无法保证节点强度及节点度相对稳定。方法③同方法①一样保留了中心度值较大节点,但同方法②一样,连边关系的剔除无法保证强度的相对稳定,且多次取值对比,增加的计算量。本文方法能够在剔除节点间较小影响关系,简化网络结构的同时,保证节点的完整性,虽无法保证节点度值相对稳定,但结合对节点强度变化趋势的分析(如图4所示),可证明本文方法所得阈值下的整体影响截距阵中节点强度变化趋势与原整体影响矩阵节点强度变化趋势非常接近,可保证节点相对影响关系的稳定,且对于加权网络,节点强度相较于节点度更能体现节点相对影响关系,一定程度上体现出本文阈值计算方法的可行性及优势。
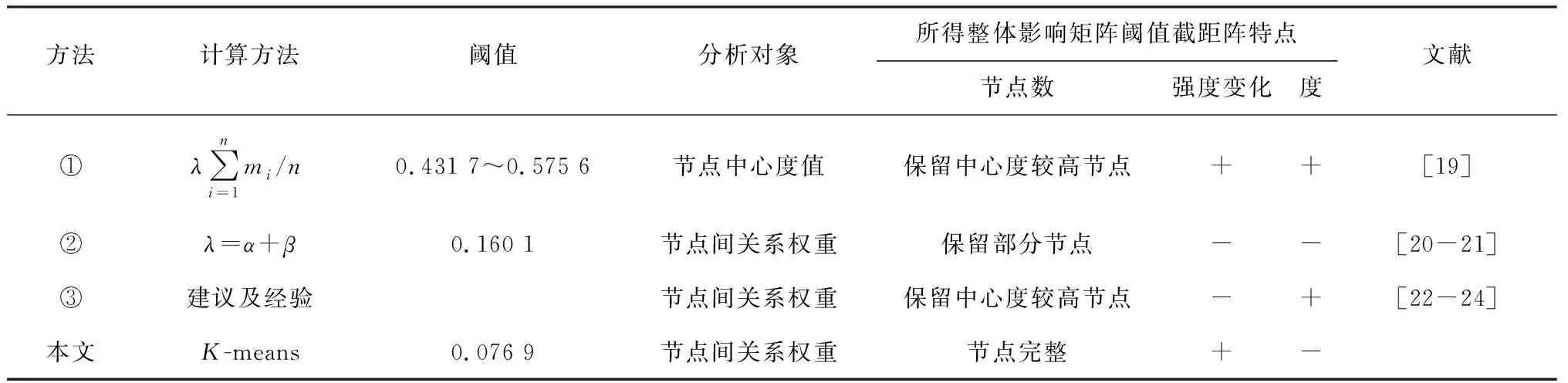
表5 整体影响矩阵阈值截距阵特点对比
2)含有影响程度权重值的层级模型构建。由人机交互信息关系的可达矩阵计算及层级划分及载人潜水器人机交互信息层级结构模型构建对层级结构模型计算与构建过程可知,本文改进基于阈值的可达矩阵判别式,得到保留整体影响矩阵截距阵元素值的可达矩阵;依据所得可达矩阵,分析各节点的可达集与先行集,提出对抗轮换层级抽取方法进行要素层级划分;最后采用适用于含影响值可达矩阵的最大、最小模糊算子,依据缩边公式计算得到影响值骨架矩阵,构建出含影响因子层级结构模型。依据已有文献[19,23]绘制未改进计算方法的层级结构模型,如图6所示。
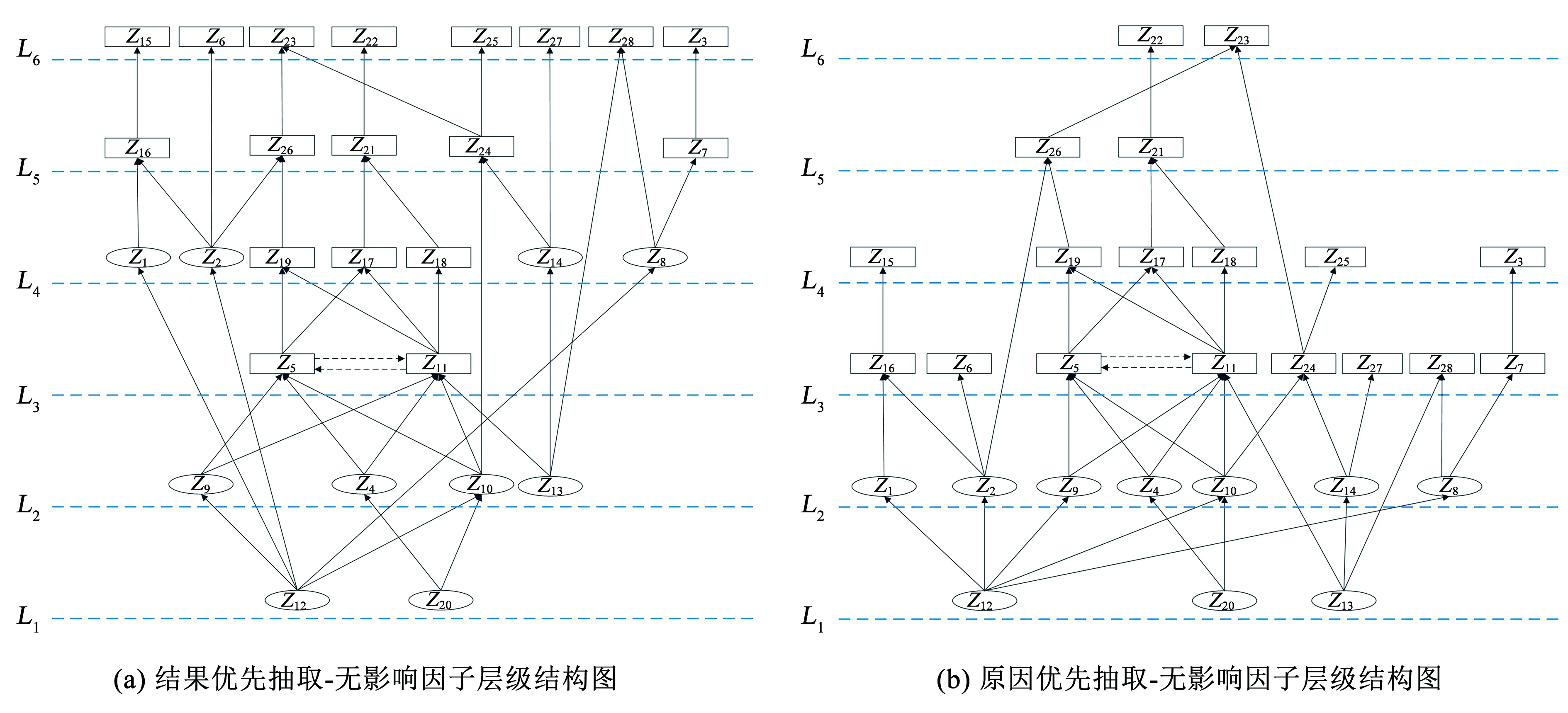
图6 无影响因子层级结构模型图
由上述结构模型与本文所得含影响因子层级结构模型对比可知,本文所得层级结构可很好的将更多的原因属性要素至于底层,将结果属性要素置于顶层,将关键过渡要素置于中间层,并识别出活动要素,同时保留整体影响矩阵中要素间影响值。所构建含影响权重层级结构模型赋予DEMATEL-ISM模型更多实践意义,例如用于分析要素间存在的致因关系强度,识别要素间最短致因路径等,更好地为指导交互信息界面设计提供理论依据。
3 载人潜水器人机交互信息层级结构模型分析
依据本文研究所得面向任务的载人潜水器人机交互信息系统层级结构模型,如图5所示,对面向任务的载人潜水器人机交互信息层级模型的层级结构特征及要素间致因关系进行分析。
3.1 载人潜水器人机交互信息模型层级结构特征
结合各层级要素DEMATEL属性值,可以看出,原因属性信息要素主要分布于结构模型底端第L1、L2层,结果属性要素主要分布于模型顶端L3~L6层。所得交互信息层级结构由底至顶层级原因属性逐渐减弱,结果属性逐渐增强。
结合各层级要素在实际任务中的语义特征,L1为激活交互过程的信息,如Z12发现作业样本、Z13作业目标观察及Z20潜器的姿态感知,可作为层级结构中的根本原因层;L2为引起潜器状态发生变化外部情景信息,包含Z1潜器大地坐标、Z4避碰、Z8海底地貌、Z9海底暗流、Z10与作业目标相对位置、Z14作业目标观察,为直接原因层;L3为潜航员为应对潜器系统外部环境而做出的行为反馈,如Z11航行控制,L3中信息要素Z5与Z11形成环路,为层级结构中所属信息要素中心度均值最大的层级(ml3>ml1>ml4>ml2>ml5>ml6),作为原因属性要素层级最直接行为反馈,是介于原因属性层级及效应属性层级之间的关键过渡信息层;L4~L6主要为航控引起的系统状态变化参数信息,如Z17潜器航向、Z18航速、Z19横、纵倾参数,Z21推进器状态、Z22电气设备参数等,可分为直接效应层L4以及终端效应层L5、L6。
综上分析可知,L1、L2层级信息要素在交互信息系统中为主变因素,是潜航员交互行为发生的前因信息,在实际任务信息处理过程中,当前因信息的变化超出安全范围时,则可能从根本上改变任务目标优先级,例如紧急情况下,由海底暗流等因素引起的避碰信息的突然变化,可能会直接中止当前任务的执行,改为确保人机系统安全为优先目标,潜航员对前因信息的及时感知,可以在一定程度上避免因“人为忽视”导致的紧急情况的发生;同理,L3~L6层层级信息要素在交互信息系统中作为因变要素,是潜航员交互行为发生的效应信息,对此类信息的掌握,可以使潜航员能够及时感知行为反馈,提高察觉操作相关潜器系统及设备故障的概率,可在一定程度上避免因“操作不当”或“没有及时察觉设备故障”导致的紧急情况发生,降低人机系统作业风险。
因此,从信息要素在潜航员任务信息认知处理过程所体现的原因-效应属性的角度,提出对人机交互界面信息要素区分化显示的建议,使潜航员在任务过程中及时定位引起系统状态变化的原因所在,积极采取应对措施,同时及时捕捉到操作反馈信息,提高人机系统的安全及作业效能。
3.2 载人潜水器人机交互信息要素致因关系分析
在层间关系分析的基础上,依据层级结构模型中要素间影响权重,结合各信息要素实际任务语义,分析各层级信息要素致因性及要素间的致因关系。
在L1信息要素中,Z20潜器姿态感知的出度权重和最大,其次为Z12发现作业样本,其中,Z12标志着决策任务的开始,而Z20的重要致因性在于若潜航员感知到潜器姿态发生改变,则需将注意力从样本观察或其他当前任务中转移至潜器姿态调整中,以确认潜器与外部环境相对距离稳定安全,是信息系统中最重要的致因要素;L2信息要素中,Z4避碰(观察窗)出入度权重最高,Z4与出度信息Z5结合,指导潜航员掌握潜器避碰状态,进一步影响航控。要素Z10与作业目标相对位置出入度值最大,决定着采样任务的顺利执行,是该层重要的致因要素。L3信息要素Z11出入度要素个数及权重皆为最高,是人机交互信息系统内最重要的致因信息要素,其出度信息为L4层要素Z17潜器航向、Z18潜器航速、Z19横纵倾,是潜器系统实现精准航控,安全高效作业的保障。L5、L6中各要素出入度权重及度值较为均衡,为致因性较弱的效应要素。此外,对于出现于任务过程中,但没有存在于信息要素致因关系中的活动要素Z29、Z30、Z31,是任务中必不可少但可以独立于任务流程的存在,即当故障检测与报警、水声通信、生命支持系统状态正常时,不会对原任务产生影响,若此类信息发生变化并超出安全阈值,会直接改变系统目标优先级。
对于含影响因子的层级结构模型,要素间的权重值代表了潜航员视角下任务信息要素间逻辑相关影响程度,即当信息要素A和B之间的权重大于A和C时,意味着信息要素A的变化会更多的引起B的变化,基于此思想,可识别出层级结构模型中目标信息的主要致因路径,以关键信息要素Z11为例,其主要致因路径为Z20潜器姿态→Z4避碰(观察窗)/Z10与作业目标相对位置→Z11航行控制/Z5避碰(水声通信PC)→Z17潜器航向/Z18潜器航速/Z19横、纵倾→Z26压载/Z21推进器状态→Z22电气设备状态/Z23液压系统状态。主要致因路径的识别,体现出致因路径内信息要素在潜航员认知内的相关性关系,可用于指导人机交互界面信息元素相关性设计,例如,当任意信息要素发生变化时,可通过交互界面突出显示其主要前因及后果信息要素,使潜航员能够快速捕捉人机系统状态或外部环境状态的变化,以帮助潜航员快速理解所处情境,及时做出正确的操作反馈。
因此,从信息要素间存在的认知内逻辑影响相关性关系的角度,在以上提出的对原因-效应信息要素区分化显示的基础上,提出增强交互信息界面中处于同一致因路径内原因-效应信息要素共现概率,增强潜航员对目标信息相关的前因及效应信息的监控程度,降低潜航员情境信息感知及搜寻成本,在一定程度上降低潜航员的信息认知处理负荷。
4 结 论
1)本文运用决策阶梯DL,以潜航员实际任务信息处理过程为基础建立人机交互信息要素初始关系矩阵,基于改进DEMATEL-ISM方法,进行一系列计算与分析,最终得到能够定性表示交互信息要素相对逻辑位置、定量表示交互信息要素逻辑相关性的有向加权层级结构模型,并通过案例对比,证明了本文所提交互信息层级结构模型构建方法的合理性及优势。
2)针对所得有向加权层级结构模型,结合潜航员实际任务信息处理过程,对人机交互信息系统中的信息要素及所属层级的原因-效应属性特征进行分析,识别出关键信息要素及层间致因关系。在此基础上,进一步分析了各层级信息要素间的致因路径。从层级信息属性及层间信息致因性的角度,提出了相应的设计建议,为理解潜航员认知基础上的人机交互信息处理过程,合理化载人潜水器驾驶舱人机交互信息界面设计提供了理论依据。
