基于激光干涉和视觉技术的铟瓦标尺自动测量装置研制
2022-12-13金中希
金中希
(广东省计量科学研究院,广东 广州 510405)
0 引言
铟瓦标尺与数字水准仪配套使用,对水准勘查和建筑物的形变监控发挥了重要作用。铟瓦标尺属于高准确度的计量器具,使用一段时间后,需要对铟瓦标尺刻线间隔进行检定[1]。因这种标尺刻线多,为准确、高效地瞄准和测量刻线间隔距离[2],研制了结合激光干涉仪和视觉识别技术的自动测量装置[3],用于铟瓦标尺的计量检定。
1 总体介绍
本测量装置主要由激光干涉仪、视觉图像采集系统、传动系统、伺服系统等组成,外观如图1所示。
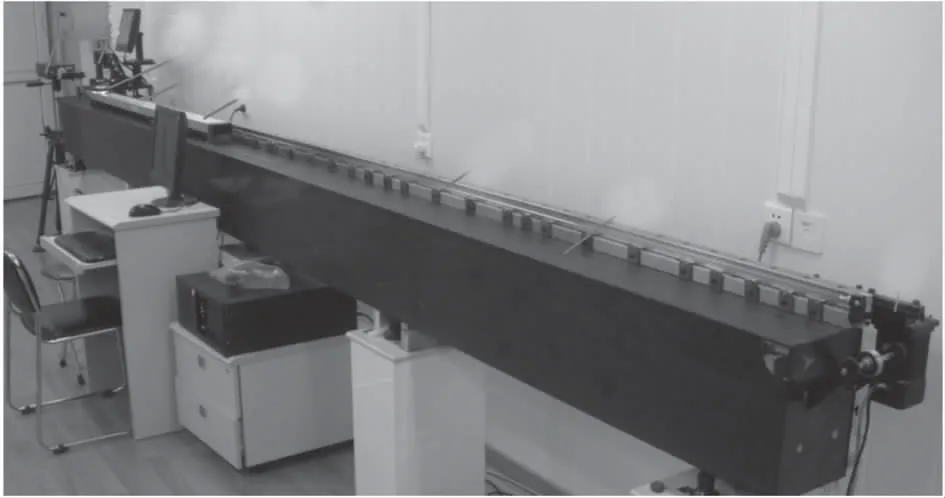
图1 测量装置外观图
测量基本原理:采用伺服电机驱动工作台进行初始定位[4],由激光干涉仪准确测量移动的距离L,再经过视觉抓拍,确定零位起始刻度线的像素值P0和被测刻度线像素值Pm,取其差值与屏幕像素的标定值e相乘,则被测刻度线与零位起始线的实际距离LP按式(1)计算。

2 主要硬件组成
2.1 测长标准器
该装置测量范围上限达到5 m,且测量准确度要求高,测长主标准器采用激光干涉仪是最好的选择。本项目采用RENISHAW公司的ML10激光干涉仪作为距离测量的主标准器,该激光干涉仪最大允许误差为±0.7×10-6L。激光干涉仪是基于激光波长常数的原理开发出来的,当在工况环境下工作时波长会发生改变,必须对波长的改变进行补偿。目前商业化的激光干涉仪已将波长补偿到标准环境,即温度T=20℃、大气压力P=101.325 kPa、相对湿度H=50%。由于实验室实际环境情况偏离了标准环境条件,为保证准确度必须根据实际情况修正。借鉴《量块》(JJG 146—2011)规程中采用激光干涉仪绝对测量二等量块的方法,采用目前国际上广泛使用的Edlen公式得到修正系数λ来修正激光波长,即将测量的数据乘以修正系数λ与0.999 728 8(标准修正值)比例。
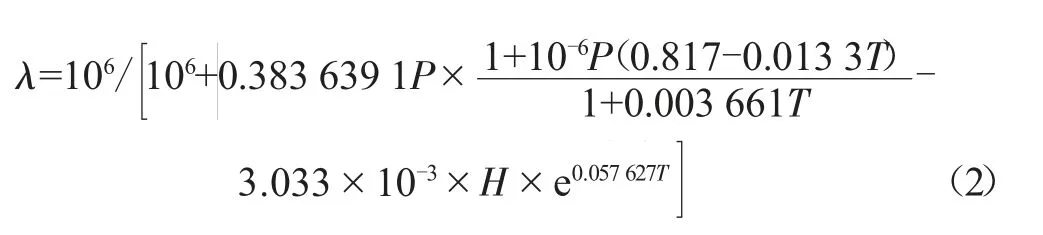
式中:P为大气压力,P=100.6 kPa;T为激光光路上的空气温度,取T=20.2℃;H为相对湿度,H=53.6%。
代入式(2),可求得λ=0.999 730 7。
经与激光干涉仪自带的测量软件进行比较,实际效果很好,在全长5 m的量程上,本项目开发的激光读数软件与激光干涉仪自带软件读数相差不超过0.2 μm。
2.2 传动系统
要完成自动测量,必须配备传动机构,可以采用齿轮齿条、摩擦轮、丝杠或皮带传动,如果采用前两者,工作台上要安装电机,电机的振动对测量有影响。采用丝杠传动的话,机械承力结构会比较复杂,由于本装置工作台拖动力并不大,速度也不高,整体传动功率不大,采用皮带传动是比较好的选择。皮带中的同步带传动具有工作无滑动、恒定传动比、平稳、缓冲减振的能力以及传动效率高(0.98)的优点,本装置最后选择采用同步带传动。
根据国家机械行业标准《圆弧齿同步带传动第3部分:设计方法》(JB/T 7512.3—2014)来设计和选择同步带。经理论分析和实际测算,考虑静摩擦力的因素,工作台开始拖动最大拉力Fmax=60 N,运动平稳后,拉力为47 N,工作台移动速度一般为0.8 m/s,最大移动速度不会超过Vmax=3 m/s,考虑到同步带低转速的情况多,将工况系数增加到k=2~4,最大功率Wmax按照式(3)进行估算。

根据国标《同步带尺寸》(GB 11616—1989)来选择同步带:齿距5 mm,带宽20 mm,齿形采用圆弧齿,根据工作实际条件,中心距为5.35 m。同步带总长设计成10.86 m,根据伺服驱动器脉冲当量(10 000脉冲/r),设计出带轮的直径名义为50 mm,齿距为5 mm,这样将带轮的齿数圆整为32齿,实际直径为50.93 mm。
为了保证测量准确度,减少运动中的角摆误差,导轨运动的直线度不能超过0.02 mm/m,精密滚子直线导轨最长只能做到3 m,要达到5 m的量程必须驳接,这对支撑导轨的平台又提出了新的要求。为了保证平台具有很好的刚性和长期稳定性,消除自重及环境导致的平台变形,装置将平台设计成整体结构。考虑实际搬运到实验室和加工的可行性,最后平台的尺寸设计为长5.3 m、宽0.2 m、高0.3 m,表面的平面度在全长5 m范围内不超过0.008 mm。
2.3 运动伺服系统
运动伺服系统的设计需要确定运动控制卡、伺服驱动器和伺服电机。本装置其实只是单轴控制,不需要任意两轴之间的圆弧插补等运算,综合分析性价比,选择了实用性强的国产MSP8048运动控制卡以及相应的交流伺服驱动器和伺服电机。
该运动控制卡基于PCI总线,配备丰富的Windows环境下的函数库,方便设计软件,实现计算机与控制卡之间的数据交换。
2.4 图像采集系统和光源
当前机器视觉图像处理技术发展快,可选择的产品多。本装置采用性能可靠的国产MVC3000F工业相机,该工业相机具备即插即用的USB2.0接口,图像采集系统的安装非常方便,通过专用的USB视频电缆即可与控制计算机直接连接,实时获得BMP格式无压缩的每帧图片,方便软件的后续处理。
本装置要适用于等距刻线的铟瓦标尺和非等距的条码铟瓦标尺,这些尺子大多都是建筑工程上使用过的,表面经常有污点、刻线磨坏、表面油漆脱落等缺陷,给拍摄图像中的目标识别带来了干扰,通过调整光强可以在一定程度上消除这种影响。本项目采用光强可调整的LED光源以适应不同的测量目标,照射方式为前向照明,即光源和相机位于被测物的同侧,光源直接固定于CCD镜头,两者的高度差超过40 mm,为方便调焦,配备了远近可调光学镜头。
3 软件实现
软件采用VS2010 C++基于MFC开发[5],使用了大量的接口库函数,其中最重要的有3个:
(1)第1个为启动视频函数int MV_Usb2Start,CCD视频系统经过初始化后,使用该函数就可以将视频图像显示到预定的位置;
(2)第2个为控制电机运动的函数short int MSP8048_TSP_CON_MOVE(unsigned char CardNO,unsigned char AxisNO,float Distance),CardNO为初始化卡号,AxisNO为运动轴号,Distance为运动的距离;
(3)第3个为采集激光读数函数char rdvGetReading(void),激光干涉仪初始化后,通过该函数就可以将激光移动的距离字符串读入程序中的变量,经处理,将字符串ASCII码变换成double数据。
软件采用人机对话的主界面,通过此窗口,操作人员可以向计算机发出一系列命令,实现数据设置、激光/环境/CCD视频检查等工作。
软件的基本流程如下:
(1)初始化CCD视频和驱动卡;
(2)启动视频,标定像素值,得到像素比例e值;
(3)根据选择的测量对象,工作台移动到零线;
(4)图像采集,噪声消除平滑化处理,将图像转化为灰度图;
(5)采用大津阈值法(最大类间方差法)将图像二值化;
(6)各刻线边缘点滤波,求中线;
(7)取激光读数,第一次清零;
(8)工作台移动到被测线,跳到步骤(4)进行循环,直到所有的刻线测量完毕。
在图像处理软件开发过程中,选取恰当的阈值对准确分离出标尺的刻线边界至关重要,刻线边界的分割是否准确直接影响刻度分划误差测量的准确度。针对被测铟瓦标尺的特征,经多次实验矩不变法、最大熵法以及最大类间方差法选择图像分割阈值,决定采用效果最好的最大类间方差法。
最大类间方差法的基本原理是先取某个灰度值,以它为界将图像分为灰度值大小两类,分别计算这两类中像素点数及灰度平均值,并计算它们的类间方差,最后取所有灰度的类间方差中的最大值对应的灰度为所求最佳阈值。
计算公式如下:

式中:n1(i)、n2(i)分别为灰度小于i的像素与大于等于i的像素的数目;v1(i)、v2(i)分别为它们的平均值。
为了方便编写程序,引入了表达式ArgMax[w(i)],实质上w(i)就是一个以灰度值为自变量的函数,求阈值就是找出函数值取最大值的位置,即找到w(i)中最大值的下标作为图像分割的最佳阈值,再对铟瓦标尺的帧图片进行二值化处理。
对每行像素从最左边开始寻找,一旦发现像素值发生改变,就得到了第一条刻线的左边缘,记录此位置像素点横坐标;继续往右寻找,再发现像素改变时为第一刻线的右边缘,取平均值获得第一条刻线的中线坐标。
同样的原理找到第二条刻线的中线,两中线坐标之差即为相邻两刻线在该行的像素之差。按此方法搜索整个图片,找出所有行上各刻线中线之间的像素值,结合屏幕的标定值e和激光干涉仪读数,计算得到各刻线之间的距离。
4 装置测量铟瓦标尺的不确定度
根据式(1)的数学模型,导出测量不确定度的表达式如下[6]:

式中:c(L)=1;c(e)=Pm-P0,为起始刻线和测量刻线像素差值,以200像素为例计算;c(Pm-P0)=e,为像素标定值,一般取3~6 μm/像素,以4为例计算;u(L)为激光干涉仪读数值给出的不确定度分量;u(e)为像素标定值不准给出的不确定度分量;u(Pm-P0)为软件确定起始刻线和测量刻线像素差值不准引起的不确定度分量,记为u(P)。
将以上数据代入式(5),得到:

下面分别计算u(L)、u(e)、u(P):
u(L)受到激光干涉仪的误差(示值误差不超过±0.7×10-6L)、温度传感器的测量误差(实际误差不超过±0.1℃)、多次测量的重复性误差(s=1.44 μm)3个方面的影响,3个影响量不相关,直接合成,对于3 m的铟瓦标尺,计算出u(L)=2.2 μm。
为了准确标定屏幕的像素值,定制了标准刻度玻璃尺,标定时取像素间隔P=200个像素,采用标准刻度玻璃尺的实际校准值,其扩展不确定度U不超过1 μm,k=2,则u(e)=U/(kP)=1/(2×200)=0.002 5 μm/像素。
图像二值化后,剔除粗大误差,将刻线边界检测不准引入的误差控制到最小,刻线边界检测引入的误差不会超过1个像素值,按半宽为0.5个像素的等概率分布处理,计算出像素。
将以上数据代入式(6),得到铟瓦标尺的标准不确定度uc(Lp)=2.54 μm,取包含因子k=2,则扩展不确定度U=2uc(Lp)≈5.1 μm。
5 结语
该装置自投入使用以来,通过了铟瓦条码水准标尺检定装置考核,取得了广东省市场监督管理局颁发的计量标准合格证和社会公用计量标准证书(〔2018〕粤量标粤法证字第32号),对客户送检的铟瓦标尺进行了有效量值传递。
根据不确定度不超过被检定器具允许误差1/3的原则[7],该装置的测量不确定度U=5.9 μm,对于允差为±(0.02 mm+20×10-6L)以下的其他水准标尺也能进行符合性判断。
