机载降水云雷达的数据质量控制
2022-12-12左懂飞丁德平赵德龙
左懂飞 杨 玲 丁德平 赵德龙
(1.成都信息工程大学电子工程学院,四川 成都 610225;2.北京市人工影响天气中心,北京 100089)
0 引言
云是大气中水汽达到饱和后,通过凝结或凝华悬浮在空中一定高度上的由水滴、过冷水滴或冰晶组成的混合物。云的形成与消亡伴随着大气垂直运动以及潜热释放和吸收,反映大气的热力和动力过程,通过形成、发展、移动及消散过程参与全球水循环。云作为重要的气候因子,通过辐射强迫效应调节地气系统的能量收支平衡[1-2]。
过去,国内外学者主要利用地基遥感设备(雷达、微波辐射计等)来研究云微物理参数[3-6],后来飞机作为在线观测平台[7-9]被广泛应用。为解决地基雷达与飞机在线观测在时空上两者无法同时连续的问题,怀俄明大学研制了机载云雷达[10],集合飞机在线探头更加精细化地研究了云的宏微观特征。机载探测设备可以直接进行穿云实验,获取云内微物理参数,对理解研究云的形成、云微物理参数以及对人工影响天气的指导和评估都起着重要作用。
机载雷达在观测过程中,可以根据云层位置,在不同的云层高度进行穿云探测,具有较强的灵活性。目前,常见的机载云雷达有机载Ka波段云雷达、机载W波段和X波段雷达。2010年,商建等[11]利用GPS探空数据和地基12通道微波辐射计观测亮温分析得到的液态水廓线,对实验中的机载Ka波段降水雷达进行衰减订正。吴琼等[12]利用机载双频雷达(Ku/Ka波段)进行了降水反演算法的相关研究。陈廷娣等[13]利用TRMM卫星与机载雷达对降雨数据进行了对比分析。Pazmany等[14]利用机载W波段雷达和GVR进行云参数的反演。Wolde等[15]利用NRC的机载W波段、X波段雷达和183 GHz G波段水汽辐射计(GVR)进行观测,并使用在线云物理测量数据,验证机载W波段雷达和GVR反演是否一致。Damiani等[16]利用机载雷达收集的数据,开发了一种新技术,并将其用于二维风场的合成。
1 机载降水云雷达简介
机载降水云雷达(Ka-band precipitation cloud radar,KPR)安装在北京市人工影响天气中心 Kingair350飞机探测平台上,是美国ProSensing Inc公司生产的一种机载云雷达,是一个装在粒子测量系统(PMS)中的紧凑型、双波束、固态发射机的多普勒雷达。KPR安装在北京市人工影响天气中心空中国王飞机的机翼上(图1),KPR具体参数如表1所示。KPR传输线性调频波形和频率为60 MHz的短脉冲偏移两种波形,利用10 W峰值功率固态放大器来传输调制这两个长短脉冲,计算两个脉冲间的接收信号。线性调频波形用于远距离测量,而短脉冲用于近距离测量,将长短脉冲结合可提高灵敏度。KPR有两个天线,一个向上,一个向下,采用线性极化平板阵列,用于在飞机上方和下方进行测量,可连续观测云的水平垂直结构变化。KPR使用标准脉冲对算法测量反射率(dBZ)、多普勒速度和多普勒宽度。
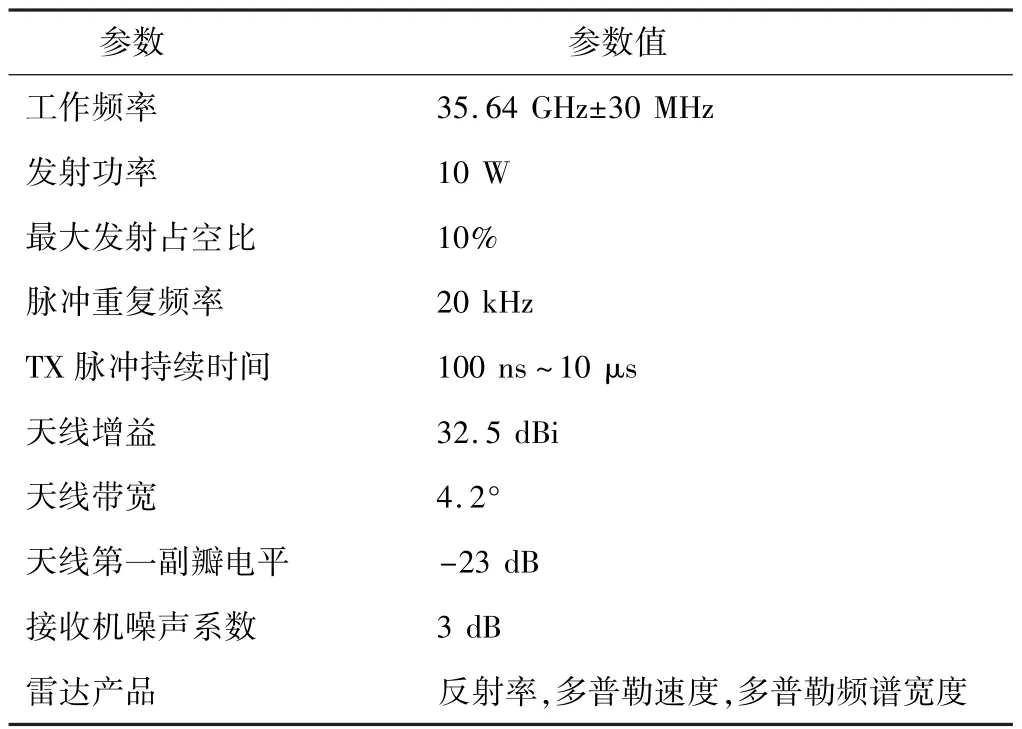
表1 KPR参数
2 工作原理
KPR可以在多种模式下工作,包括脉冲对处理和FFT全频谱处理。在脉冲对模式下,KPR分为3种工作模式:在Up模式下(图2a),雷达只通过向上的天线发射和接收信号;在 Down模式下(图2b),雷达只通过向下的天线发射和接收信号;在 Up&Down模式下(图2c),雷达通过向上和向下的天线交替发射和接收信号。一般情况默认使用上下天线同时测量。
多天线机载气象雷达的扫描停留时间较短,而脉冲对返回信号的传输和处理非常适合这样短的数据采集时间。在脉冲对模式下,计算 lag-0(m=0)和 lag-1(m=1)和 lag-3(m=3)的信号相关性。在这些变量中,有信号功率、相干信号功率以及多普勒速度和谱宽。使用脉冲序列,可以测量在lag-0和lag-1和lag-3时雷达接收信号的复数自相关函数R(mTs),进而可以估计出雷达的反射率、多普勒速度和谱宽。
其中,Ps和Pn分别为信号功率和噪声功率,ρ(mTs)为相关系数,而

谱宽σD可根据高斯形状的天气信号功率谱近似于:
和大多数天气雷达一样,KPR也是通过相关的技术校准提供等效的雷达反射率因子:
雷达反射率因子可以用Cη和测得的功率表示为

最后可得校准后的雷达反射率因子:
3 KPR轨迹订正及杂波滤除
图3和图4是KPR探测到的两个不同云类型的原始产品图。KPR显示的视角是以飞机位置为基准(显示高度为0 km),向上探测高度值为正,向下探测高度值为负,上下各有516个距离库,库长为15 m,剔除掉无用的距离库(上下各51个),总距离库为930个,探测范围约为13950 m。
从KPR的产品图可以看出,在无云处存在很多的背景噪声,为消除其他区域杂波的影响,需要对 KPR原始产品进行滤波处理。而高斯滤波器是一种线性滤波器,能有效抑制噪声,平滑图像。其原理是取滤波器窗口内的像素的均值作为输出,高斯滤波器的模板系数,随着距离模板中心的增大而减小,对图像的模糊程度较小。
对于高斯滤波,二维高斯函数(原点为中心):
其中(x,y)为点坐标,在图像处理中可认为是整数,σ是标准差。要想得到一个高斯滤波器的模板,可以对高斯函数进行离散化,得到的高斯函数值作为模板的系数。对于窗口模板的大小为(2k+1)×(2k+1),模板中各个元素值的计算公式如下:
其中,σ是高斯滤波器最重要的参数,σ越大,高斯滤波器的频带就较宽,对图像的平滑程度就越好。通过调节σ参数,可以平衡图像的噪声抑制和图像的模糊。通过高斯滤波,可以滤除掉KPR产品图中多余的背景噪声。
KPR的原始产品图是以机载雷达为中心的扫描视角,与常规的基地云雷达的产品图存在明显差异,为更好地判断云顶云底等信息,需要把机载雷达的产品图转换为地面观测形式,因此需对飞机轨迹进行订正。根据机载气象探测系统(AIMMS-20)记录的飞行高度,轨迹订正将 KPR探测的高度值订正到海拔高度上。KPR的时间分辨率为0.2 s,而AIMMS-20的时间分辨率是1 s,将两者进行时间匹配,以获取每个径向上对应的飞机高度。KPR记录的高度是每个径向下距离库到飞机的距离,根据每个径向上的飞机飞行高度依次减去(加上)飞机下方(下方)每个距离库到飞机的距离就可以得到飞机下方(上方)真实的海拔高度。
当KPR上下扫描时,在飞机上下300 m左右存在一个探测盲区,这是由于 KPR在发射和接收脉冲信号时,产生的噪声和增益使得飞机轨迹处的探测值较大。为了剔除飞机轨迹处的噪声,获取真实的探测数据,采用二次样条插值,对飞机轨迹处的噪声和增益进行处理。
图5和图6分别为20191022和20190921架次经过数据质控制后的KPR产品图,可以看出消除了背景噪声的干扰,产品图质量明显改善,能更清晰地看出云回波的整体轮廓。经过二次样条插值,消除了飞机轨迹噪声和增益,获得飞机轨迹处真实的雷达产品数据。
对于图5(a),KPR探测到的云类型为层状云降水,在海拔3 km左右有一条清晰的融化层亮带,该时段飞机主要位于海拔5.8 km,降水较为稳定。对于图5(b),速度图在融化层上下有明显的“分层”现象,在融化层以上速度值较大,约5~8 m/s,在融化层以下,速度值较小,约2~-2 m/s。对于图6(a),KPR探测到的云类型为对流云降水,可以看出,本次共观测到4个对流云单体。从时间序列上结合回波强度来看,第1、3个单体回波相对较弱,还处在发展中,而第2、4个对流云单体回波整体较强。在海拔2 km左右,最大回波达到了35 dBZ,相对发展成熟。由于对流云不稳定,没有融化层亮带的形成,速度图没有明显的“分层”现象,对于图6(b),KPR测量的速度值约为-3~8.5 m/s。
一般情况,在融化层以上,云中粒子多为冰晶雪花,粒子下落速度较小,而在融化层,云中多为尺度较大的降水粒子,下落速度较大。但是结合KPR测量的速度图来看,这与实际情况不符,主要是因为 KPR安装在飞机上,导致KPR测量的多普勒速度受飞机运动的影响。在下一节中,将对测量的多普勒速度和谱宽进行订正。
4 多普勒速度和谱宽的订正
多普勒速度是在天线波束方向测量的,因此,速度图是测量水成物的垂直速度。原始的多普勒速度和谱宽数据受飞机运动的影响,需要对原始的多普勒速度和谱宽进行修正。
当雷达安装在一个移动平台上(如飞机),通常会有一个小的偏移,导致天线波束相对于飞机速度矢量倾斜。多普勒速度的偏移:
其中,θoffset是KPR天线波束相对垂直于飞机速度矢量的偏移量,为了得到订正后的多普勒速度,结合式(14),有
其中,V'为修正后的多普勒速度,V为修正前原始的多普勒速度。
原始数据测得的谱宽σV是由水成物谱宽(σS)和平台运动产生的谱宽组合(σPM)而成,即
平台运动引起的谱宽可以从天线波束宽度和飞机的速度中估计出来,天线主波束分布可近似为高斯分布:
天线的方向近似垂直于平台的速度矢量,有限天线波束宽度产生的多普勒速度与平台速度θV0=v和以弧度表示的波束角度θ有关(假设小于0.1)。假设散射体在样品体积中分布均匀,运动诱导的多普勒速度谱形状可以近似为
其中,由于平台运动产生的标准谱宽σPM为
KPR天线的半功率波束宽度为4.2°,约等于0.0733 rad,即
因此,对于KPR则有
根据以上相关理论,可以对原始速度和谱宽进行订正。图7(a)为20191022架次订正后的多普勒速度,在融化层以上,由于温度低于0℃,云中粒子更多的是以冰相粒子(冰晶、雪花)的形式存在,冰相粒子的下落速度较小,从图中可以看出,融化层以上,粒子下落速度在-1~1 m/s。在融化层以下,存在着降雨,粒子下落速度比较大,在-6 m/s左右。订正后的多普勒谱宽如图7(b),谱宽较高的区域可能是因为该区域有较高的湍流,也可能是因为不同尺度的降雨粒子产生不同大小的速度。即小液滴下落速度低,谱宽小,大液滴有较大的下落速度,谱宽大。
图8(a)为20190921架次订正后的多普勒速度,第1、2、4个对流云单体,粒子下落速度在-8~2 m/s,特别是在海拔4 km以下的对流区域,存在较大的雨滴,此时粒子下落速度较大,约为-4~-8 m/s;在4 km以上,粒子下落速度较小,约为-2~1.5 m/s。对于第3个对流云单体,在海拔4 km以下,云中粒子速度约为-6~4 m/s;在4 km以上,粒子下落速度约为-2~2 m/s。订正后的多普勒谱宽如图8(b)所示,谱宽较大的区域可能是由于不同尺度的降雨粒子产生不同大小的速度导致的。
本文统计了数据质控前后飞机轨迹探测盲区附近300 m处的反射率的均值和标准差以及所有高度上速度和谱宽的均值和标准差[16]。从表2可以看出,订正前后的反射率平均值分别为16.04 dBZ、11.26 dBZ,标准差分别为9.81 dBZ、8.45 dBZ,消除了轨迹噪声的干扰,反射率平均值和标准差分别下降了4.78 dBZ和1.36 dBZ。订正前后的多普勒速度平均值分别为0.52 m/s、-5.42 m/s, 标准差分别为15.64 m/s、14.37 m/s,多普勒速度平均值和标准差分别下降了5.9 m/s和1.27 m/s。订正前后的谱宽平均值分别为2.83 m/s、1.37 m/s,标准差分别为3.26 m/s、1.46 m/s,谱宽平均值和标准差分别下降了1.46 m/s和1.8 m/s。经过数据质量控制,订正后的速度和谱宽质量明显改善,但也存在一定误差,其主要原因是飞机姿态的未知误差和KPR波束指向矢量精度较低[10]。

表2 KPR数据质量控制前后结果对比
5 结束语
介绍了北京市人工影响天气中心King-air350飞机探测平台上搭载的新型机载降水云雷达,对KPR的工作原理以及相关技术指标进行了说明。通过收集到的两个不同架次的数据,对KPR的产品进行了滤波处理与飞机轨迹订正,完成了多普勒速度和谱宽的订正。结果表明,经过滤波处理与飞机轨迹订正的KPR产品图,质量明显改善,能更清晰直观地获取云的宏观特征。订正后的速度和谱宽质量明显改善,但也存在一定误差,在后续的工作中,考虑结合地基雷达进行匹配,或根据粒子下落速度与直径的关系,开发出一套更合理的算法来实现更精准的订正效果。
相较于地基雷达,KPR有着较高的分辨率和探测灵活性,能克服时空匹配,更好的结合飞机在线测量进行联合观测,具有很高的利用价值,能更加精细化的研究云的宏微观特征。在未来的工作中,我们会通过雷达数据对比分析与反演,联合飞机在线测量,进一步给出详细分析。
