非接触磁浮机构弱磁力多维检测系统研究
2022-12-11曹宇贾巧娇王世明
曹宇,贾巧娇,王世明,2
(1.上海海洋大学 工程学院,上海 201306;2.上海海洋可再生能源研究中心,上海 201306)
0 引言
随着科技的发展,电磁设备正广泛地在航空、航天、高铁领域应用[1,2]。非接触磁浮机构是典型的电磁控制设备,具有高带宽、无摩擦、高精度力控性能等优势,可以显著提升操作平台的控制性能[3]。唐忠兴等[4]开展了高精度非接触磁浮机构设计及其输出特性测试研究,验证了“双超”卫星地面验证方案的可行性;谢进进等[5]针对操作平台电磁兼容问题,开展了非接触磁浮机构的电磁干扰特性研究。传统的非接触磁浮机构弱磁力检测多采用单自由度检测方式,采集区域受限,需要增加自由度数提高非接触磁浮机构的输出特性测试区域并满足高精度测试要求。薛蕾等[6]以Lab-VIEW为开发环境,结合数据库技术设计了一维度比例电磁铁性能测试系统;王祖尧等[7]开展了两自由度磁力悬浮非线性振动能量采集研究。
本文采用稳定可靠的双输出可编程电流源、三维位移电动平台、光栅尺、上位机、工控机等设备,配合先进成熟的控制及检测技术,通过有效的降振降噪处理,实现非接触磁浮机构洛伦兹力多自由度检测。
1 非接触磁浮机构测试工作原理
非接触磁浮机构的核心工作原理如图1所示。

图1 非接触磁浮机构系统构成示意图
在磁轭上安装有永磁体,其产生的磁场穿过激励线圈。激励线圈由两组线圈构成,一组在磁场范围内沿水平向绕制,另一组在磁场范围内沿竖直向绕制。当两组线圈中分别通入电流后,将产生竖直和水平方向的洛伦兹力。对于洛伦兹力的测量基于公式(1),可转化为对激励线圈竖直方向力变化的测量,并得到输出弱磁力与控制电流的定量匹配关系。

其中ΔFN为洛伦兹力变化值,ΔI为控制电流变化值,B为磁场强度,L为线圈移动位移。
2 非接触磁浮机构弱磁力多维检测系统组成
系统由精密可调节电流源子系统模块、自存储防磁力传感器子系统模块、相对运动控制及检测平台子系统模块、上位机中控系统平台模块等组成。非接触磁浮机构弱磁力多维检测系统的工作流程图如图2所示。
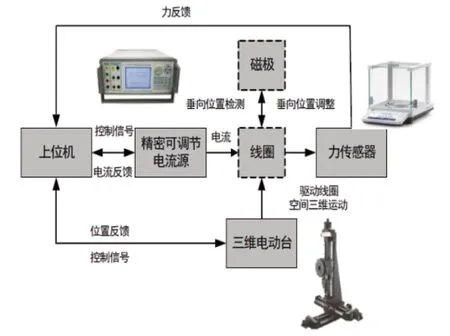
图2 检测系统的工作流程图
洛伦兹力测试布置如图3所示,将非接触磁浮机构激励器的磁缸固定在吊装臂上,激励线圈放置在万分级自存储防磁电子天平的载物台上,利用电子天平测量激励器输出力(Z向)竖直方向的数值,电子天平可以反馈时历结果给上位机;通过角度调节器,改变磁浮机构线圈XZ平面内的角度,记录磁浮机构线圈与磁极垂向相对角度;同时吊装臂与三维电动平移台连接,可实现磁缸相对磁路部分在预定的路线内移动,可自行设计空间x、y和z向平移路线,三维电动平移台可以反馈时历位移结果给上位机;通过旋转激励线圈(旋转90度),通过坐标换算进而测量同一路径下的激励器输出力水平方向的数值;相关数据可通过上位机中控软件实时监测,软件具有良好的用户交互性及现场展示功能。

图3 洛伦兹力测试方案布置图
为了降低气流、声音、平台振动、平衡度影响,检测系统设置了液压式平衡台,平衡台表面采取蜂窝状设计,并在整个检测系统外部设置玻璃罩,隔绝声音,气流影响。检测系统实物图如图4所示。

图4 检测系统实物图
3 非接触磁浮机构弱磁力多维检测系统模块化设计
3.1 精密可调节电流源子系统模块
为检测系统工作提供稳定电流源,并能够与上位机进行控制信号传输及电流数据实时反馈。需要配置电流源如图5所示,恒流源采用DSP控制回路,配置原理图如图7所示。子系统满足具备2路独立可调节电流输出,每路输出电流范围为[0~1]A;输出电流从0.5mA到100mA,绝对误差≤0.5mA;输出电流100mA到1A,相对误差0.5%;供电输入为220V交流电,地面设备内具备过载保护功能。

图5 电流源设备

图6 恒流源配置原理图

图7 上位机中控系统管理软件主界面
3.2 自存储防磁力传感器子系统模块
为检测输出的洛伦兹力数值提供自存储数据功能,并能够与上位机进行数据实时反馈。子系统配置万分级防磁力电子天平,满足检测力的范围为[0~0.1]N,输出力范围5×10-5N到1×10-2N,洛伦兹力检测绝对误差≤5×10-5N;输出力范围1×10-2N到0.1N,相对误差0.5%。考虑到激励线圈和天平的移动会影响测量精度,基于相对运动原理,本设计选择磁缸运动,线圈和天平不动。
3.3 相对运动控制及检测平台子系统模块
为检测系统线圈与磁极提供三维空间相对位移,检测相对位置坐标,具备自存储数据功能,并能够与上位机进行数据实时反馈。子系统配置三维电动平移台,满足磁浮机构线圈与磁极在三维空间范围内每维方向相对位置变化范围为±10mm;在三维空间±10mm范围内检测磁浮机构线圈与磁极三维空间相对位置坐标,坐标检测精度优于0.05mm,最小步距10μm。
3.4 上位机中控系统平台模块
上位机中控系统作为核心控制单元,通过编制上位机中控系统管理软件,控制卡以9010或9030发出串口控制信号,驱动三维电动位移台运动,从而带动磁缸运动;精密可调节电流源输出可控电流,使激励线圈通电切割磁感线;三维电动平移台丝杆设置编码器实时输出脉冲信号,以获得磁缸与激励线圈的实时相对位置,三维位移台具有位置反馈功能;设置回零功能,在找到零点之后,运动轴停止,编码器与指令位置均清零重置;具有I/O检测功能,能快捷控制输出口的通断。
4 非接触磁浮机构弱磁力多维检测系统的运行测试
为检验非接触磁浮机构弱磁力多维检测系统运行是否稳定,结果精度是否满足需求,进行了样品检测试验。具体测试步骤及结果如下。
4.1 测试步骤
1)调整水平减振台使台面处于水平位置,保证检测系统整体水平。
2)登录上位机中控系统管理软件,软件界面如图7所示,通过控制三维位移台,调整磁缸与线圈的位置,使磁缸完全罩住激励线圈,三维电动位移台参数设置界面如图8所示。

图8 三维电动位移台运动参数设置界面
3)防磁力电子天平天平标定置零;
4)设定电流源采集数据间隔为1000ms,步骤如图9所示,电流源设定初始电流0.01A,电流步长为0.01A每10s变更递进,电流最大值为0.1A,共测试10组电源采样数据。

图9 电流源采集数据间隔设置界面
5)设置天平数据采集间隔为10s,共测试10组天平采样数据,如图10所示。

图10 天平数据采集设置界面
6)上位机系统开始存储采集到的数据。
4.2 测试结果及分析
测得天平及电流源数据如表1所示。

表1 天平测试数据

表2 电流源测试数据
如表1所示,天平读数随电流增加而线性增加,且增量平均数值为0.1092,增量波动平均绝对值为0.002238g,换算洛伦兹力测试误差为2.19324×10-5N,自存储防磁力传感器子系统模块满足功能需求。
如表2所示,电流源测试数据在前10000ms均可以稳定在0.01A附近,误差范围为10-5A。11000ms跳变为0,然后增至0.02A,仍可保持稳定输出,精密可调节电流源子系统模块满足功能需求。
三维平台电机每转脉冲为3200转,丝杠导程为4mm,传动比为1,三维平台位移精度为1.25um,且三维平台三轴导程皆大于10cm,线圈与磁极平面内相对运动通过二维电动平台驱动,其垂向运动可通过手动调节方式实现,相对运动控制及检测平台子系统模块满足功能需求。
上位机中控系统平台模块在使用过程中,可以实现对数据进行转换和储存,三维电动位移平台位移数据具备实时保存功能,电流源与天平数据可实现按照时间间隔采样保存。
5 结语
非接触磁浮机构弱磁力多维检测系统采用稳定可靠的双输出可编程电流源、三维位移电动平台、光栅尺、上位机、工控机等设备,配合先进成熟的控制及检测技术,通过有效的降振降噪处理,实现了非接触磁浮机构洛伦兹力多自由度检测。非接触磁浮机构弱磁力多维检测系统已经投入实际的样品检测,经现场应用情况反馈,该系统运行稳定、检测结果满足工程精度要求,而且具有很好的抗干扰能力,达到了企业的预期效果。
