履带平台无人驾驶系统基于语义信息的模块串联方法
2022-12-01陈慧岩关海杰刘海鸥龚建伟吴贺禹
陈慧岩, 关海杰, 刘海鸥, 龚建伟, 吴贺禹
(1.北京理工大学 机械与车辆学院, 北京 100081; 2.中国兵器工业导航与控制技术研究所, 北京 100089)
0 引言
地面无人机动平台能够代替人类在越野环境下完成危险物资运输、灾情救援、战场环境侦察等任务,减轻或避免人类在越野危险环境中的负担与消耗。地面无人机动平台一般由环境感知、运动规划、运动控制、底盘执行4个基本模块组成[1]。在越野环境中,如何利用更多的高阶语义信息有效地串联无人驾驶系统中的各个模块以提升地面无人机动平台在越野环境中的通行能力,成为重要的研究方向。
越野环境下无人驾驶系统环境感知模块可通行区域的提取的准确性与稳定性对于提升地面无人机动平台的通行能力至关重要[2],而其中环境语义信息的获取对于可通行区域的分类提取必不可少。目前环境感知模块关于环境中语义信息的提取主要在城市道路等结构化场景下进行[3],而越野环境相较于城市结构化场景具有环境特征不明显、地形地势复杂、地表形式多样等特点,对无人驾驶系统提出了更高的要求。目前越野环境语义信息分割主要是基于深度网络学习人工标注语义标签特征,利用端到端的方法将环境特征与语义信息建立映射关系,输出环境信息中的语义特征[4]。文献[5]采用对比学习的方法训练具有语义区分度的特征提取器,实现不同通行度的类别建模。
越野环境下无人驾驶系统运动规划模块利用环境感知模块提供的信息的方式主要有两种,第一种是基于平面假设的二维栅格地图,将环境信息分为可通行与不可通行两类,该类方法主要是对不可通行的障碍物进行规避[6-7],但是缺少环境感知模块对于三维环境高度以及语义信息的输入,在具有连续起伏路面或者有大量可通行植被,烟雾等环境中会出现运动规划出现错误解甚至不可行解的情况。另一种是将环境高度特征进行表征,又分为2.5D类型的地图[8-10]、三维点云地图[11]以及三维栅格地图[12]。2.5D地图是在地图栅格中赋予高度或者其他相关信息,其中赋予高度信息的地图类型又称为数字高程地图。文献[8]考虑了环境中的坡度和粗糙度利用混合A*图搜索算法进行运动规划。文献[9]将环境分类为环境态势场、道路层、威胁层、障碍层等多层数字高程地图建立最终的态势场模型利用人工势场的方法进行运动规划。文献[10]采用地形层,坡度层,地表特征分类层,地图不确定性层考虑能量消耗进行运动规划。三维点云地图是使用相机或者激光雷达等传感器直接输出的原始数据得到的地图。文献[11]采用三维点云地图结合快速随机扩展树(RRT)、改进快速随机扩展树(RRT*)和基于数值优化的方法生成具有三维信息路径。该方法在生成路径的过程中,利用点云信息通过拟合平面得到当前位置的三维空间姿态,通过包含三维空间姿态的代价函数进行节点的选择与路径的优化。三维栅格地图是通过对点云信息进行局部离散化计算,可以避免进行大规模点云计算时间效率低下的问题。文献[12]采用三维栅格地图对环境中的局部障碍进行分析,并通过平台结构与环境信息对于平台的位姿进行估计,用于运动规划来避免平台姿态的突变。
越野环境下无人驾驶系统运动控制模块主要解决复杂环境下的地面无人机动平台与接触地面难以完全表征的关系,即模型的不确定性。文献[13]针对越野环境的不确定性,设计了一种基于反馈校正的模型预测控制器。文献[14]考虑控制延时与执行机构的执行延时的模型预测控制器,针对平台延时问题进行了控制模型的设计。文献[15]提出利用自适应前馈调节器采用粒子群优化算法和支持向量机的方法,通过轨迹中的曲率与速度信息对控制器进行策略调整。文献[16]针对行为轨迹与操控层上映射关系进行了相关研究。
前期的研究针对无人驾驶系统中的各个模块均开展了相应的工作,但各个模块之的串联方式比较弱化。针对该问题,本文利用语义信息串联环境感知模块、运动规划模块、运动控制模块,丰富了无人驾驶系统模块之间的输出信息,提升了地面无人机动平台在越野环境的通行能力。
1 基于语义信息串联的无人驾驶系统
1.1 系统框架
图1为本文所提无人系统框架。图1中,加粗字体为框架中包含语义信息的两方面内容:一是串联环境感知与运动规划模块的三维语义栅格地图,二是串联运动规划与运动控制模块的行为语义轨迹;T(sx,sy,sz,syaw,spith,sroll,sv,stype)为三维姿态信息的轨迹,sx、sy、sz为轨迹点以在平台局部三维坐标系x轴、y轴、z轴的三维坐标,syaw、spith、sroll为轨迹点在绕平台局部三维坐标系轴的旋转角度量,sv为轨迹点上的期望速度,stype为轨迹点对应行为基元的类型;(px、py、pz)为栅格的三维坐标,pt为栅格的可通行度,pγ为栅格对应的法向量;C(vl,vr)为运动控制模块输出,其中vl、vr分别为履带平台左右侧履带速度。

图1 基于语义信息的无人驾驶系统框架
三维语义栅格地图将环境基于图像语义属性、激光雷达点云特征更详细地建模分类,形成更加丰富的通行度语义分类,运动规划模块基于该地图通过利用离线生成的运动基元库首先根据参考速度与平台前方可通行区域的通行度选择当前最优的运动基元簇,其中的运动基元是指在有限的时间并符合自身约束条件下车辆从起始位姿到目标位姿的轨迹,运动基元簇是通过采样不同的目标位姿形成的轨迹簇。之后与根据与全局参考线的偏差、曲线能量、碰撞风险、通行度代价等在线选择出最优的运动基元,生成具有平滑且姿态变化小的轨迹,根据不同行为语义的运动基元对生成轨迹进行分段得到行为语义轨迹。
行为语义轨迹将规划轨迹基于行为语义基元进行分段,运动控制通过轨迹匹配,利用数据集合中的优化参数在线实时调整控制参数,减小运动跟踪控制跟踪轨迹的横向偏差、航向偏差、速度偏差。
1.2 底盘执行模块
本文采用图2所示中型无人履带平台作为无人驾驶系统的底盘执行模块。该平台通过串联式混合动力辅助动力装置(APU)系统结合能量管理算法为平台提供驱动能量,同时动力电池可以单独为平台供能。该平台的驱动形式为双侧独立电驱动,两侧驱动链为驱动电机分别串联两挡机械式自动变速器(AMT)行星变速箱与侧减速器将动力传递至履带。由于两侧驱动电机之间无机械结构连接限制,平台可在复杂越野环境中灵活行进。平台搭载64线主激光雷达与2个16线激光雷达形成激光雷达组;采用3个相机作为图像传感器;采用定位信息接收机结合千寻网络差分与惯性导航系统作为平台的定位源。采用3台工控机作为计算设备,其中一台配备RTX 2080Ti作为图像语义分割处理工控机,另外两台分别处理激光雷达点云和运动规划控制程序。

图2 中型混合动力地面无人履带机动平台
1.3 环境感知模块
如图3所示,环境感知模块利用相机与激光雷达融合感知的方案,结合全局拓扑参考路径,考虑障碍物、起伏地形、地表粗糙度、地面语义属性以及地面无人机动平台稳定性等,输出带有局部可通行度语义栅格地图。

图3 三维可通行度语义栅格地图
1.3.1 图像语义分割与点云融合
首先基于BiSeNet V2[17]网络在数据集上训练来提取图像特征完成输入图像的语义分割,在图像分割出的可通行语义的类别中,如土路、草地等,通过激光雷达系统与相机系统之间的坐标转化关系将图像提取到的语义信息投影至激光雷达点云上形成激光雷达语义点云,将不可通行语义类别如车辆等,直接赋值为不可通行区域。之后采用激光雷达语义点云进行可通行区域的粗提取。图4所示为实际场景中激光雷达语义点云。

图4 激光雷达语义点云
1.3.2 可通行区域粗提取
通过相机与激光雷达数据融合得到语义点云信息描述环境,考虑本文所用平台的横纵向通过性能,纵向包括最大坡度、垂直墙跨越高度,横向包括平台发生倾覆的最大横坡角度。通过对三维点云的拟合法向量以及高度梯度进行提取与履带平台通过能力的阈值进行比较,提取不可通行和未知区域。其中,未知属性可以根据点到车体距离远近和点云局部密度大小进行判断,距离平台较远和点云密度过低的判定为未知属性;不可通行属性可以通过比较点云特征与平台的坡度稳定角、垂直墙最高高度等进行判断,点云特征值大于这些阈值的直接判断为不可通行。最终完成越野环境下可通行区域的粗提取。
1.3.3 可通行区域内可通行性分析
本文通过利用高斯混合聚类(GMM)方法训练出聚类模型,并对输入点云进行在线实时估计,分为三类,即易通行、可通行和难通行。
在点云特征的提取过程中,首先利用平台搭载惯导对点云位姿进行矫正,之后在平台水平坐标系计算所有点云特征,所有环境地形特征全部基于当前时刻平台所处位置进行判断。
点云特征的高斯聚类模型L(D)是根据点云样本集D={p1,p2,…,pm}为过滤后的m个点,每个点的局部特征向量为F={f1,f2,f3},高斯混合聚类的目标是最大化对数似然函数,如(1)式:
(1)

本文选取以下3个矢量作为高斯聚类的局部特征向量:
f1:点云及其邻近区域点云的法向量矢量和的模的均值,可以表示道路的不平度信息。
f2:点云及其邻近区域点云的法向量矢量和在车体水平坐标系Oyz平面投影与z轴的夹角,表示纵坡坡度。
f3:点云及其邻近区域点云的法向量矢量和在车体水平坐标系Oxz平面投影与z轴的夹角,表示横坡坡度。
其中,领近区域选取平台几何形状占据的区域。
将特征向量进行归一化处理,利用GMM方法进行多元聚类,得到易通行、可通行和难通行三类可通行度标签。
在实际在线感知过程中,将点云的特征向量输入至GMM模型,可得到当前点云的对应环境的可通行度。
1.3.4 三维语义栅格地图构建与地图融合
本文采用八叉树的数据管理地图数据,采用基于贝叶斯核推理的栅格属性推理,对三维栅格的可通行性属性进行建模,从而对点云缺失部分的栅格的属性进行推理,以实现连续的三维建图。
地图融合基于文献[18]所提方法进行融合。
1.4 运动规划模块
运动规划模块分为离线基于最优控制理论的二维行为运动基元生成与在线基于三维语义栅格地图与全局参考路径的行为运动基元选择扩展。通过将二维运动基元向三维环境进行投影,最终输出具备三维姿态信息的轨迹为
T=[sx,sy,sz,syaw,spitch,sroll,sv,stype]
图5所示为行为运动基元投影方法与拼接过渡方法示意图,其中运动基元投影方法采用基于文献[11]的方法。首先基于二维平面生成行为运动基元,得到离散的运动基元轨迹点p=[x,y] ,之后根据需要拼接的父行为运动基元末位姿确定拼接后的子行为运动基元轨迹点p′=[x′,y′],之后将拼接后的二维轨迹点投影至三维环境中=[,,] ,并在车体范围如图5中绿色矩形框所示,利用主元分析法计算法向量进而计算平台在该处的俯仰角、侧倾角、航向角。图5中不同轨迹颜色为不同类型的行为运动基元,轨迹点上的坐标系反映了当平台运动至该轨迹点时平台的姿态信息。
1.4.1 行为运动基元的生成
行为运动基元的生成考虑履带平台的基本运动学约束、平滑过渡约束、平台- 地形约束、平台行为约束,以生成行为运动基元尽可能平滑为目标,离线生成用于在线规划时所用的行为运动基元库。生成行为运动基元的优化问题定义如(2)式:

s.t.
(2)
式中:f是履带平台的运动学约束;g(·)为考虑生成运动基元在路径曲率和速度层的平滑性目标函数;B为区分运动基元的行为约束;Ue为考虑平台- 地形之间关系对控制量与状态量的不等式约束;Up为考虑平台执行机械结构与运动学约束的不等式约束;T为考虑运动基元拼接过渡的约束;优化的控制量为u(t)=[ηx(t),αΔv(t)]T,ηx(t)为平台纵向的冲击度,αΔv(t)为速差变化率的导数;平台的状态参量s(t)=[x(t),y(t),θ(t),vx(t),ax(t),Δv(t),ωΔv(t)]T,其中x(t)、y(t)和θ(t)为全局坐标系下的位置坐标值和航向角,vx(t)为平台坐标系下沿平台坐标系x轴的纵向速度,ax(t)为相对应的加速度,Δv(t)为两侧履带的速差,ωΔv(t)为两侧履带速差的变化率;t1为基元生成的起始时刻,tg为基元生成的终止时刻。
双侧独立驱动无人履带平台的运动学微分约束f如(3)式:

(3)
式中:B为两侧履带接地点中心距。图6所示为履带平台微分约束中各参量示意图,其中L为履带接地长度。

图6 履带平台微分约束参量示意图
平台行为约束主要对生成行为运动基元的起始与目标状态进行限制,常见的行为如类直线行驶,类直角弯转向,类U形弯大角度转向,调头,双移线,上下坡等行为。起始与目标状态的约束如(4)式:
(4)
式中:d为首末位姿横向移动的距离;β为首末位姿的角度差。
在运动基元生成过程中,由于平台执行机构的机械结构约束,以及平台-地形之间关系,在运动基元生成过程需要满足不等式约束如(5)式:
(5)

由于运动规划最终的输出轨迹是由行为运动基元序列组成,在离线生成基元时需要考虑横向和纵向参量的平滑过渡,约束形式如(6)式:
Tt=[ax(t1),ηx(t1),Δv(t1),ωΔv(t1),αΔv(t1),ax(tg),ηx(tg),Δv(tg),ωΔv(tg),αΔv(tg)]T=0
(6)
行为运动基元生成的目标函数从横纵向两个方面考虑了横纵参量的平滑度,离散化的目标函数表示如(7)式:
(7)
式中:c1、c2、c3、c4、c5为目标函数中各参量的权重系数;N为生成运动基元的轨迹点数。
1.4.2 行为运动基元的拼接与过渡
行为基元的拼接与过渡考虑环境感知模块提供的三维语义地形以及全局参考路径的引导,以行为运动基元的扩展代价为依据从离线行为运动基元库中选出不同种类的行为运动基元进行拼接与过渡,最终生成由多个行为基元序列组成的轨迹。
本文采用两层的运动基元选择逻辑,首先通过参考轨迹参考速度与地面无人平台参考轨迹前方可通行区域的通行度选择出合适的运动基元簇。之后在运动基元簇中通过比较运动基元的扩展代价遍历选择出最优的运动基元,其中扩展代价包括行为运动基元与参考轨迹的横纵向偏差Jo、碰撞风险代价Jc、平滑代价Js、通行度代价Jt。
本文全局规划采用基于谷歌地球卫星地图制作的环境拓扑地图[20],在环境拓扑地图的基础上利用A*搜索,完成经过必经点的全局规划,输出具有良好引导效果的全局参考轨迹[21]。因此被选择的行为运动基元上的轨迹点需要与参考轨迹匹配点在横向偏差、航向偏差、速度偏差尽可能小,代价计算如(8)式:
(8)
式中:Np为行为运动基元上等间隔采样点的总数目;p为正态分布函数;jn为生成轨迹采样点与参考线匹配点之间的横纵向偏差代价;x为运动基元轨迹点距离轨迹末端点的距离;μ为轨迹末端点设定的距离值,一般取0,σ为轨迹长度的三分之一,dn为生成轨迹采样点与参考线匹配点之间的横向偏差,Δθn为生成轨迹采样点与参考线匹配点之间的航向偏差,Δv为生成轨迹采样点与参考线匹配点之间的速度偏差;ωd、ωh、ωv分别为横向偏差、航向角偏差、速度偏差的系数。
碰撞风险代价的计算首先将地面无人平台利用文献[6]所提6覆盖圆的方法对地面无人平台外形结构进行近似,采用6覆盖圆圆心距离最近障碍物的距离do与覆盖圆半径r的差值作为运动基元的碰撞风险代价,如(9)式:
(9)
行为运动基元的平滑度评价采用综合曲率和长度的轨迹能量函数,该值越小表明该运动基元的能量越低,轨迹越平滑,该代价值计算如(10)式:
(10)
式中:κn为基元采样点上的曲率值;Δsn为相邻采样点之间的间距。
在环境感知提供的三维语义栅格地图下,运动基元的通行度代价计算包含两个方面,一方面是将行为运动基元轨迹点匹配栅格附近平台外形结构大小区域的拟合平面法向量与垂直方向的夹角,另一方面是与匹配区域通行度代价的均值。拟合平面法向量计算方法如(11)式:

(11)

(12)
式中:pit为栅格的可通行度;I为垂向z轴单位向量。
行为基元的最终选择是对多目标进行综合评价,选择代价的计算公式如(13)式:
J(mp)=Jo(mp)+ωsJs(mp)+ωtJt(mp)+ωcJc(mp)
(13)
式中:ωs、ωt、ωc为相应代价的权重系数。
在线基元选择的原则是选择总代价值最小的行为运动基元,通过选择基元向前扩展,当行为运动基元的末状态与规划终点区域后完成扩展后,形成最终的具有时空信息的三维轨迹。
在选择过程中,相邻行为运动基元之间的过渡基元为变速直线运动,采用三次Hermite插值完成过渡段中速度的生成。
1.5 运动控制模块

(14)

行为运动基元组成的轨迹包括道路的坡度、路面不平度、曲率特征等语义信息,以上信息对运动控制模型约束以及目标函数设计上提供更多的参考信息。在进行模型预测轨迹跟踪控制模型的建立过程中,主要考虑执行机构的机械约束、平台的运动学约束以及平台动力学约束。根据道路类型、曲率特征、平台速度等信息,对电机外特性以及履带车辆坡道转向的动力学分析,增加关于驱动系统后备功率的约束,保证极限工况下履带平台的轨迹跟踪的稳定性。当平台在坡道上进行低速匀速转向时,结合参考轨迹上平台姿态与规划速度,对车辆在坡道上跟踪行驶时所需的功率和力矩进行预测,结合电机外特性的边界值,对车辆的控制量进行约束,使得平台可以在坡道上进行稳定的轨迹跟踪。 最终建立如(15)式的约束不等式。
umin≤u(k+i)≤umax,0≤i≤Nc
Δumin≤Δu(k+i)≤Δumax
Δu(k+i)=u(k+i)-u(k+i-1)
ymin(k+i)≤yb(k+i)≤ymax(k+i),0≤i≤Np
Δu(k+i)=0,Nc≤i≤Np
(15)
式中:umin、umax的约束求解主要是结合电机外特性,道路坡道信息、车辆动力学模型等,在保证车辆具备足够的后备功率、转向力矩的前提下,得到的该工况下车辆速度边界值。Δumin、Δumax为驱动电机调速的变化率约束。Np、Nc分别是预测时域和控制时域;yb为状态量的约束输出;k为预测时域内的时刻。
基于模型预测控制方法的运动控制模块根据运动规划模块提供的由行为运动基元组成的具有语义分类的参考轨迹,采用多组控制目标函数权重系数对不同语义分类轨迹进行跟踪。根据控制目标函数如(16)式中所考虑的轨迹跟踪控制的横向偏差、航向偏差以及控制量变化率为指标反映的轨迹跟踪稳定性等构建最优轨迹跟踪控制精度的评价体系,从而得出不同控制目标函数权重系数以及不同的系数比例对最终轨迹跟踪控制效果的影响规律,建立不同语义轨迹下的控制策略数据集。

(16)
式中:ωl为横向偏差的权重系数;le为横向偏差;ωh为航向偏差的权重系数;he为航向偏差;ωv为速度偏差的权重系数;vd为期望速度值;后两项为两侧履带卷绕速度的变化率;ωu为控制量变化率的权重系数。
通过试验数据积累和分析,在平台能够进行稳定轨迹跟踪控制的可行域内,平台的轨迹跟踪效果主要受到横向跟踪权重以及航向跟踪权重的影响,同时两权重系数的比例关系在不同语义轨迹下平台的表现具有较大差异。如图7所示,平台在跟踪具有语义分类的参考轨迹时,在不同语义属性的轨迹上采用不同的控制参数来提升轨迹跟踪的精度与稳定性。

图7 控制参数语义匹配原则示意图
2 实验结果与讨论
本节展示了在地形起伏的越野场景下环境感知以及运动规划结果,基于二维栅格地图与三维语义地图的差异化的运动规划结果进行讨论,同时本文对于具有行为运动基元语义的轨迹进行了运动控制跟踪试验,对比分析了基于行为语义轨迹适配参数对于轨迹跟踪效果的提升。
试验场地选取越野环境场地,该场地道路不平度,道路表面属性差异明显,环境复杂度高。试验平台采用图2中型混合动力地面无人履带机动平台进行方法的实车测试,各模块的试验参数如表1所示。
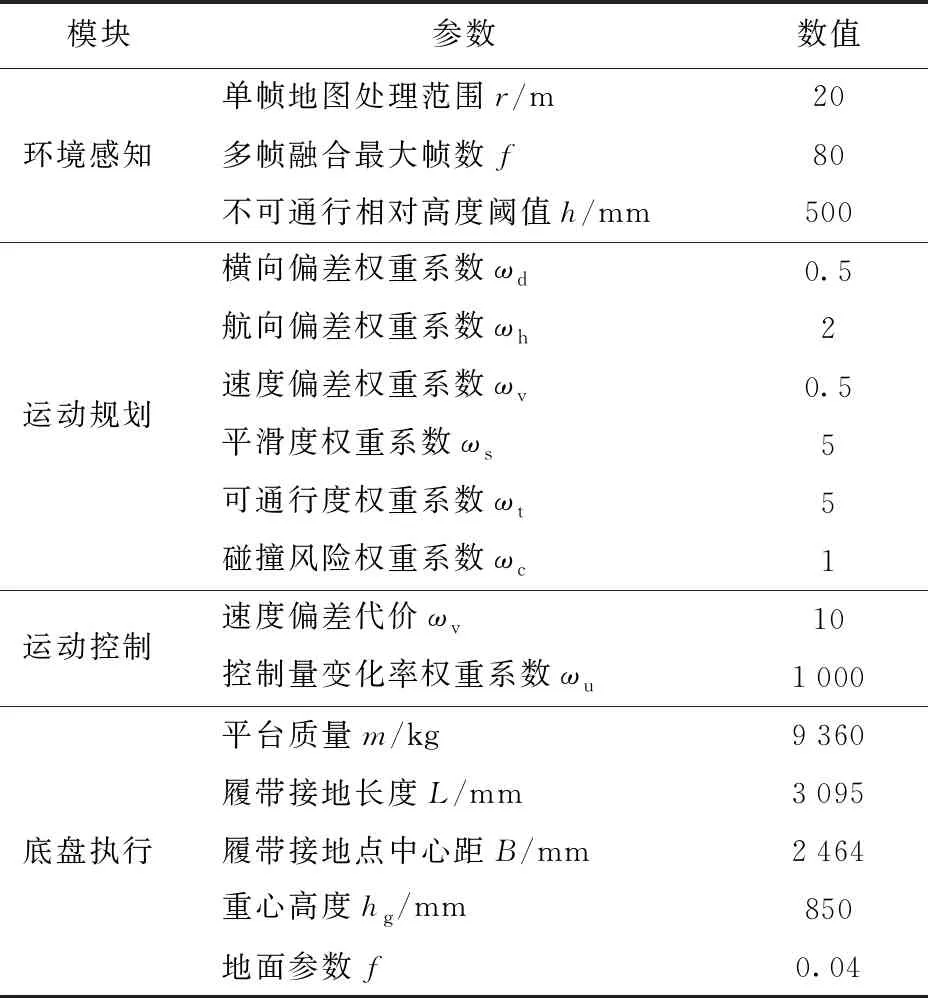
表1 各模块试验参数
2.1 环境感知结果
图8为环境感知模块对越野环境的不同方式建模结果。图8(a)是利用三维语义栅格地图对试验环境进行建图。图8(b)是根据不可通行相对高度阈值h对环境进行了二值分类。通过对比可以看出,对于环境进行简单的二值建模,造成环境中的很多信息丢失,而本文采用的三维语义栅格地图尽可能地保留了环境中信息,对运动规划模块具有很好的约束引导作用。在输入图像宽高像素为640×480、点云过滤距离为20 m、限制融合帧数为80帧的情况下本文生成单帧三维语义栅格地图的时间消耗平均为130 ms,生成单帧平面二维栅格地图的时间为96 ms,虽然时间略有增加,但时间消耗仍可以满足实时性要求。
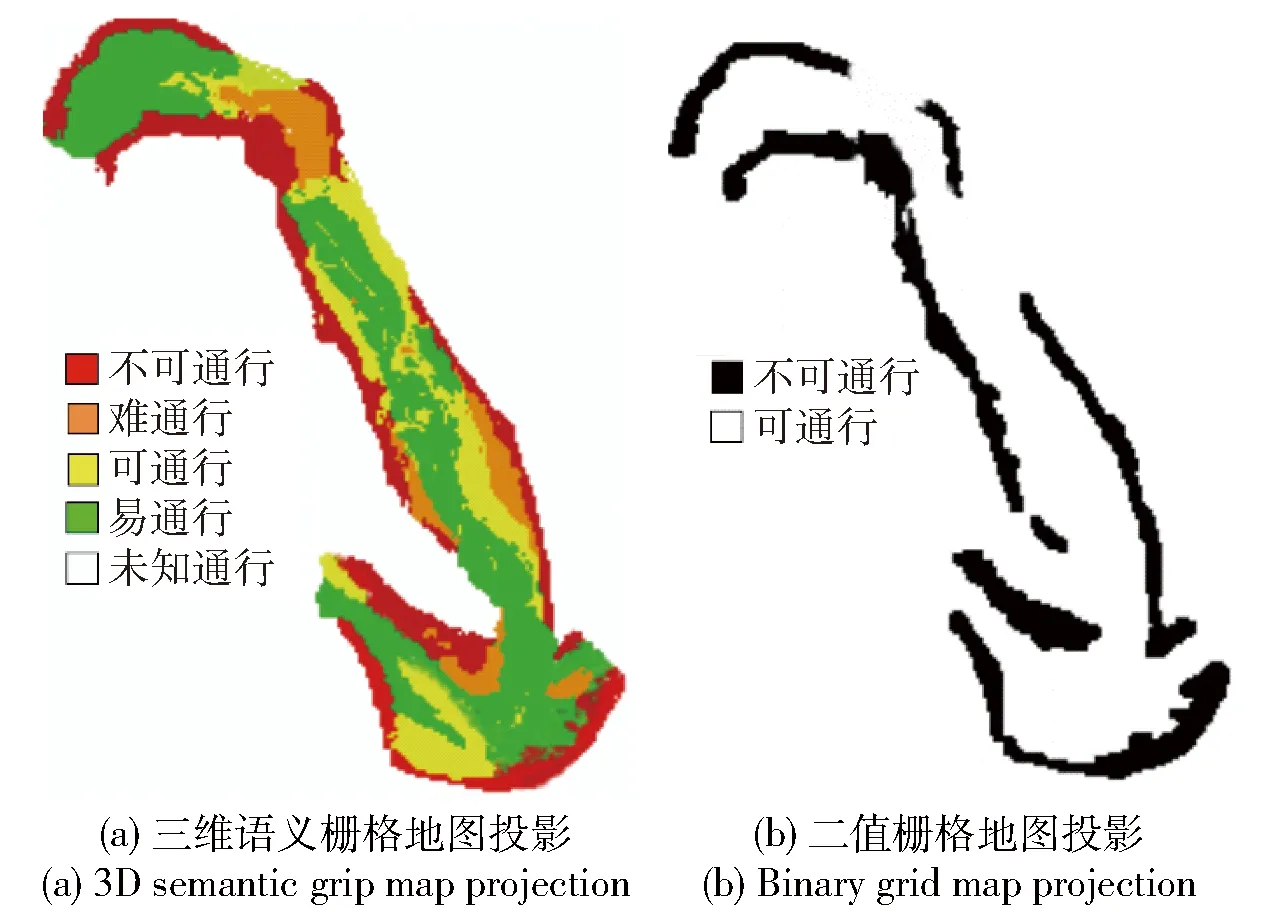
图8 环境感知建图结果对比
2.2 运动规划结果
图9为运动规划模块基于不同类型地图的运动规划结果,图9(a)中,S为直线行为运动基元,C为单移线行为运动基元,U为类U型弯行为运动基元,G为普通小曲率行为运动基元,R为类直角弯行为运动基元。

图9 运动规划结果对比
为了验证基于三维语义栅格地图的运动规划方法,将本文与文献[6]规划方法进行对比,图9为整体规划结果的对比,在整体结果对比之后选取A、B两个典型场景进行细化对比,其中A场景为类U型弯场景,如图10所示;B场景为上纵坡场景,如图11所示。无人履带平台在环境中行驶时,平台的姿态一方面影响无人驾驶系统中环境感知与运动控制模块的精度,另一方面较大的姿态变化容易对平台硬件造成损害。本文选取平台行驶过程中的平均俯仰角与平均侧倾角对平台的姿态变化进行表征。最终选取的对比指标包括规划时间、平均俯仰角、平均侧倾角、平均曲率。其中平均俯仰角、平均侧倾角、平均曲率为全部路点相关量之和与路径长度的比值。
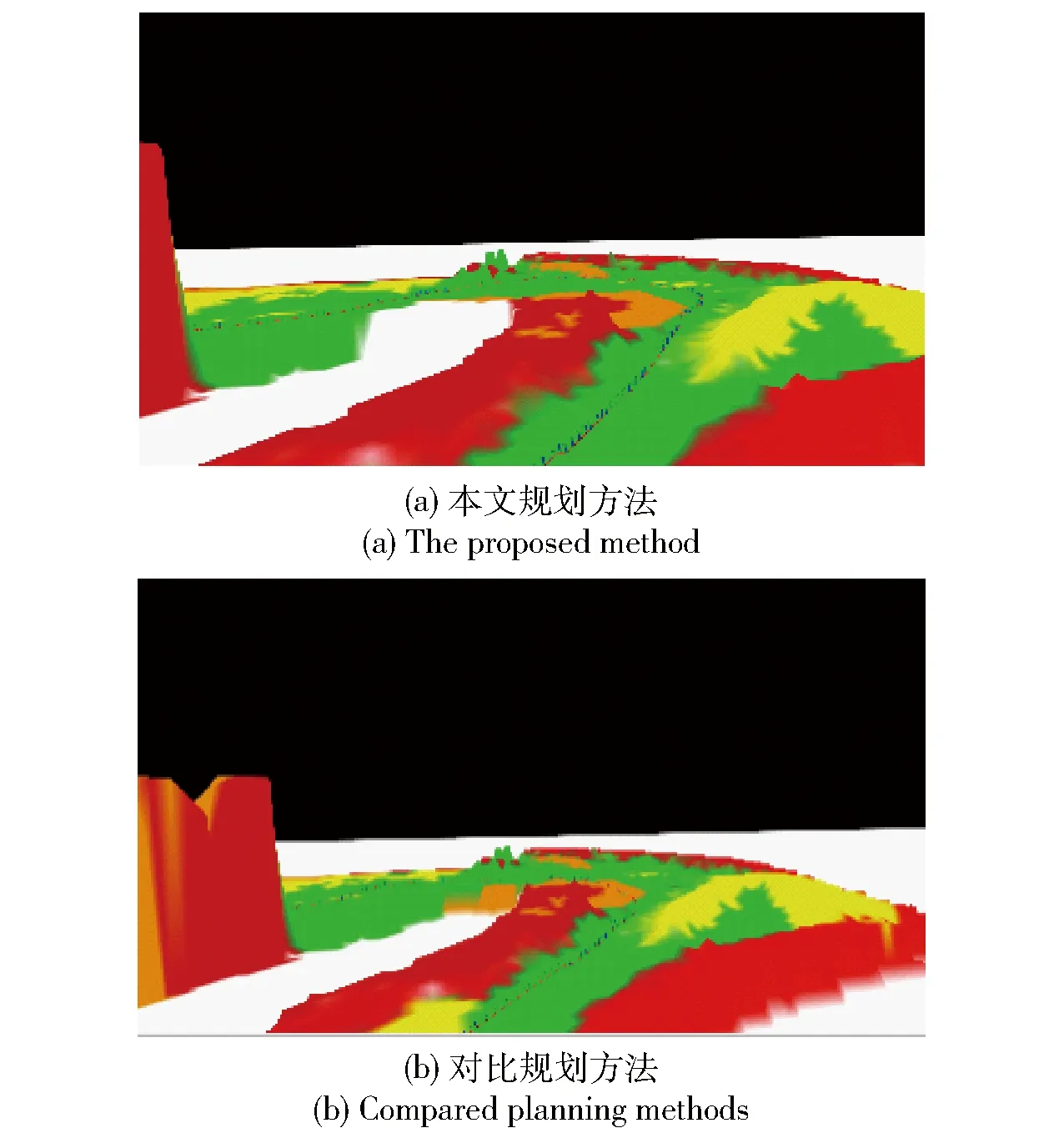
图10 A场景运动规划结果对比
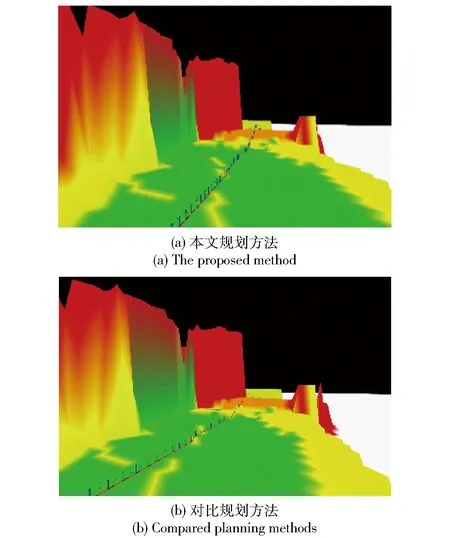
图11 B场景运动规划结果对比
通过图9结合表2规划结果的对比可以发现,本文规划方法采用离线生成的运动基元、在线选择运动基元规划路径,规划耗时集中在对于丰富运动基元的选择过程,与文献[6]规划时间基本持平。由于环境感知提供了可通度语义信息,运动规划利用该信息在规划时尽量选择易通行区域通行,而文献[6]规划方法采用二值栅格地图由于没有相关信息,在提取道德可通行区域内尽量选择较短路径,造成规划路径对应的平均俯仰角、平均侧倾角较本文方法较高,同时本文采用的运动基元在生成与选择均考虑了轨迹平滑性,因此本文在轨迹平均曲率上具备一定的优势。
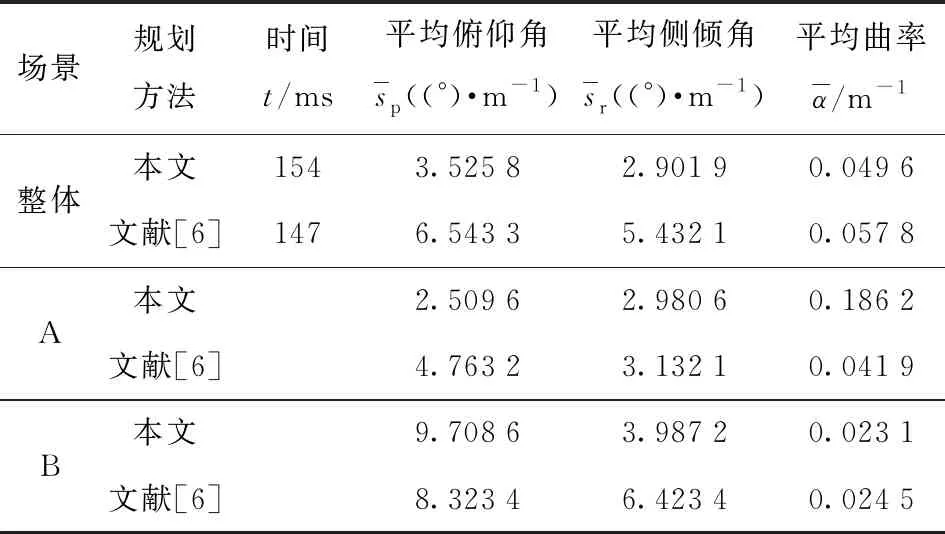
表2 规划轨迹指标对比
如图10所示,在A场景中,本文规划方法规划路径在路面不平度更低的区域,而文献[6]方法由于没有利用到该方面的信息,因此规划路径所在区域路面不平度较高,在入弯时文献[6]规划方法采用了切弯的策略,虽然使得路径的平均曲率较小,但是轨迹在入弯处规划轨迹的位姿发生较大变化,该种情况对于平台的稳定行驶具有较大的考验,而本文规划方法则绕开入弯处的难通行区域,在整个过弯过程中车辆位姿变化较小。
如图11所示,在B场景中,本文规划方法在通过纵坡类难通行区域时以相对较小的曲率通行,同时本文规划方法在上坡时基本处于坡道正中央,规划轨迹通过纵坡时侧倾角变化不大,而文献[6]规划方法规划轨迹通过纵坡时由于轨迹与和纵坡存在一定的夹角,因此规划轨迹通过纵坡时侧倾角变化较大。
本文在规划时间与文献[6]基本持平的基础上,在平均俯仰角、平均侧倾角、平均曲率等体现无人机动平台通过稳定性的重要指标中具有显著优势。同时本文所提运动规划方法,根据行为运动基元的不同,将轨迹进行了语义分段,对运动控制模块的参数优化起到参考作用。
2.3 运动控制结果
将运动规划模块生成的具有行为语义的轨迹作为参考轨迹,运动控制模块修改目标函数中的横向偏差权重ωl以及航向偏差权重ωh分别对轨迹进行跟踪,通过对比跟踪的航向偏差、横向偏差以及速度偏差,将在不同行为语义轨迹下的最佳参数组成语义参数集合,对模型预测的目标函数在线修正,形成变参数的运动控制模型。如图12所示,将变参数模型与权重比例分别为1∶1,1∶5,1∶10的定参数控制模型的三项跟踪偏差进行对比,可以发现不同权重比例的模型对于不同行为语义轨迹的跟踪效果具有偏差,而变参数模型由于针对不同行为语义轨迹进行了参数适配,从表3中可以看出,变参数模型相较于固定参数比例的模型在横向偏差最少提升20.7%,航向偏差最少提升2.7%,速度偏差最少提升6.9%;方法平均消耗时间为18.784 ms,相较于不变参算法计算成本基本没有增加。
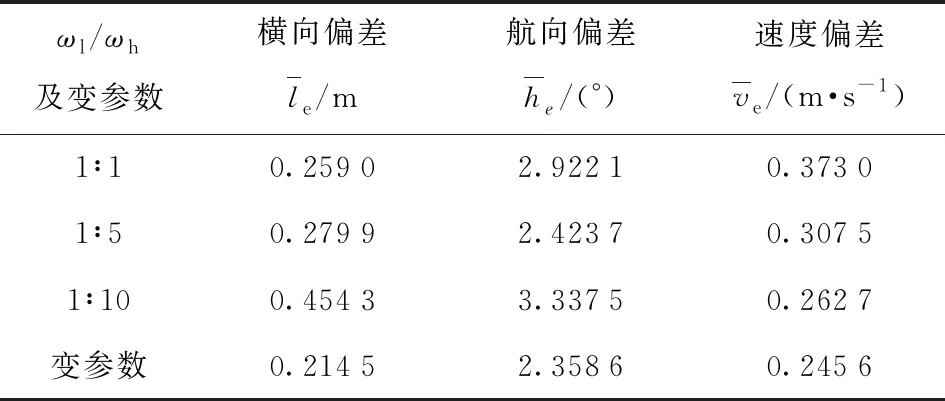
表3 轨迹跟踪偏差对比

图12 不同权重系数下轨迹跟踪结果
3 结论
本文提出利用语义信息将无人驾驶系统中环境感知模块、运动规划模块、运动控制模块之间息进行串联的方案。结果表明:所提出的基于语义信息你串联的无人驾驶系统,将难以标准量化的环境特征或轨迹特征以语义的形式表述,将定义的语义信息在无人驾驶系统模块之间的传递,不同模块利用模块间传递的语义信息对模块中模型或方法中的关键参量进行限制或约束,丰富了模块间信息交互的内容。
本文的主要结论如下:
1) 环境感知模块通过激光雷达点云与相机图像融合感知的方案,利用图像语义分割结合点云环境特征提取对环境进行建模,最终输出具有可通行度信息,地形语义信息的三维语义栅格地图。相较于平面二值栅格地图能够提供更多的环境通行度信息。
2) 运动规划模块离线基于最优控制理论生成行为运动基元,在线基于三维语义栅格地图选择合适的行为运动基元生成具有行为语义信息的轨迹。本文所提规划方法相较于基于二值栅格地图运动规划方法在轨迹的平均俯仰角、平均侧倾角、平均曲率分别降低46.1%、46.5%、14.2%。同时轨迹的语义类别属性可用于运动控制模块的参数优化。
3) 运动控制模块根据轨迹信息结合平台动力学约束,基于行为基元类型对控制目标函数权重进行在线的优化匹配,相较于定参数跟踪轨迹的方法分别在横向偏差、航向偏差、速度偏差降低17.1%、2.7%、6.1%。
