基于卷积神经网络与门控循环单元的气液两相流流型识别方法
2022-12-01张立峰吴思橙
张立峰, 王 智, 吴思橙
(华北电力大学 自动化系,河北 保定 071003)
1 引 言
两相流系统广泛存在于自然界与工业生产当中,准确实现流型识别对石油开采、火力发电等工业领域的安全生产与稳定运行具有重要意义[1~4],对流态的了解有助于选择合理的控制措施来优化产能,甚至缓解危险情况。实际工程应用中,常用于流型在线识别的方法有2类:一类是基于图像确定流型,如高速摄像法、目测法、过程层析成像技术等;另一类则基于传感器测量数据进行流型识别[5~7]。由于两相流流动特性复杂多变,测量数据具有非线性、混沌性特点,使得依靠测量数据提取流型特征较为困难。目测法受人为主观影响,高速摄像法受光线影响严重,且数据量过大[8],电阻层析成像技术(electrical resistance tomography,ERT)是过程层析成像技术的一种,具有非侵入性、非辐射等优点,可以在不干扰流动状态的情况下实现气液两相流的实时截面电导率分布重建,以此显示流型。由于ERT图像重建精度仍有待提高,直接从重建图像判别流型存在一定的局限性与误判,因此,本文基于ERT重建图像序列数据特征参数并结合深度学习网络,对气液两相流进行了流型识别研究。
近年来,机器学习的快速发展与广泛应用为数据特征提取提供了新途径,已有多种成熟的机器学习框架用于流型识别[9~11]。传统的机器学习方法如支持向量机(support vector machine,SVM)[12]、人工神经网络(artificial neural network,ANN)[13]等虽然可以较好地处理非线性问题,但难以学习时序数据的相关性,保持时序数据的连续性对流型识别有着积极影响。循环神经网络(recurrent neural network,RNN)可以很好地对动态时序数据进行建模[14],长短期记忆(long short-term memory,LSTM)网络是RNN的一种,有效解决了传播过程中的梯度消失问题,且考虑到了输入数据的长期依赖关系,门控循环单元(gated recurrent unit,GRU)网络相比于LSTM网络结构更加简单,训练参数更少,且能达到相同的效果[15]。CNN是一种典型的具有深度结构的神经网络,已广泛用于计算机视觉、语音识别等方面[16],相对于浅层神经网络能更好的提取输入数据特征,可以在一定程度上提高流型识别精度。文献[17]基于鲁棒正则化极限学习机提出一种电容层析成像图像重建方法,明显提升了图像质量。
为提高流型识别准确率,本文提出了一种基于卷积神经网络与门控循环单元(convolutional neural network and gated recurrent unit,CNN-GRU)的垂直管道气液两相流流型识别方法。基于数字化ERT系统的重建图像像素值数据,对其填充处理后进行离散余弦变换(discrete cosine transform, DCT)变换,提取DCT系数矩阵统计信息,并通过CNN进一步提取特征,有效简化了分类器的输入特征复杂度。通过分析输入向量长度对网络性能的影响,确定了最佳输入帧数,采用实验数据对CNN-GRU网络进行训练后,网络对测试集分类准确率可以达到99.40%。本文提出的方法具有分类准确率高且算法简单的特点。
2 基本原理
2.1 DCT
DCT变换是一种实数域正交变换,常用于图像压缩,可以有效剔除图像的冗余信息,将图像信息从时域转换到频域,便于提取主要特征。
对于一幅大小为M×N,各点像素值为f(i,j)的图像,其二维DCT变换如下:

(1)
变换后的图像能量分布发生了变化,大部分能量集中在少量的DCT系数上,这有利于特征提取。
2.2 CNN
CNN通过感受野与权值共享,不仅考虑到了输入数据的空间信息,还减少了网络参数数量,在高效提取数据内部信息的同时,降低了模型的复杂程度。CNN主要由卷积层、池化层及全连接层组成,如图1所示。
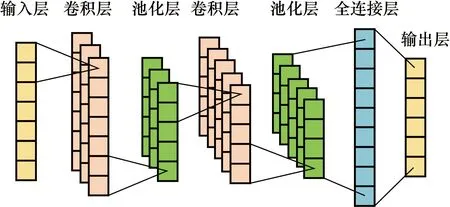
图1 CNN结构图Fig.1 CNN structure
本文选取一定帧数的差值序列作为网络输入,因此用到的卷积层结构为一维卷积,且选用ReLU函数作为激活函数。
2.3 GRU
RNN网络具有记忆能力与动态特性,循环单元的引入使其适用于处理时序数据。LSTM解决了RNN网络的梯度消失问题,GRU是对LSTM的改进形式,减少了训练参数,能够在保证预测精度的同时提高网络效率,GRU结构如图2所示。
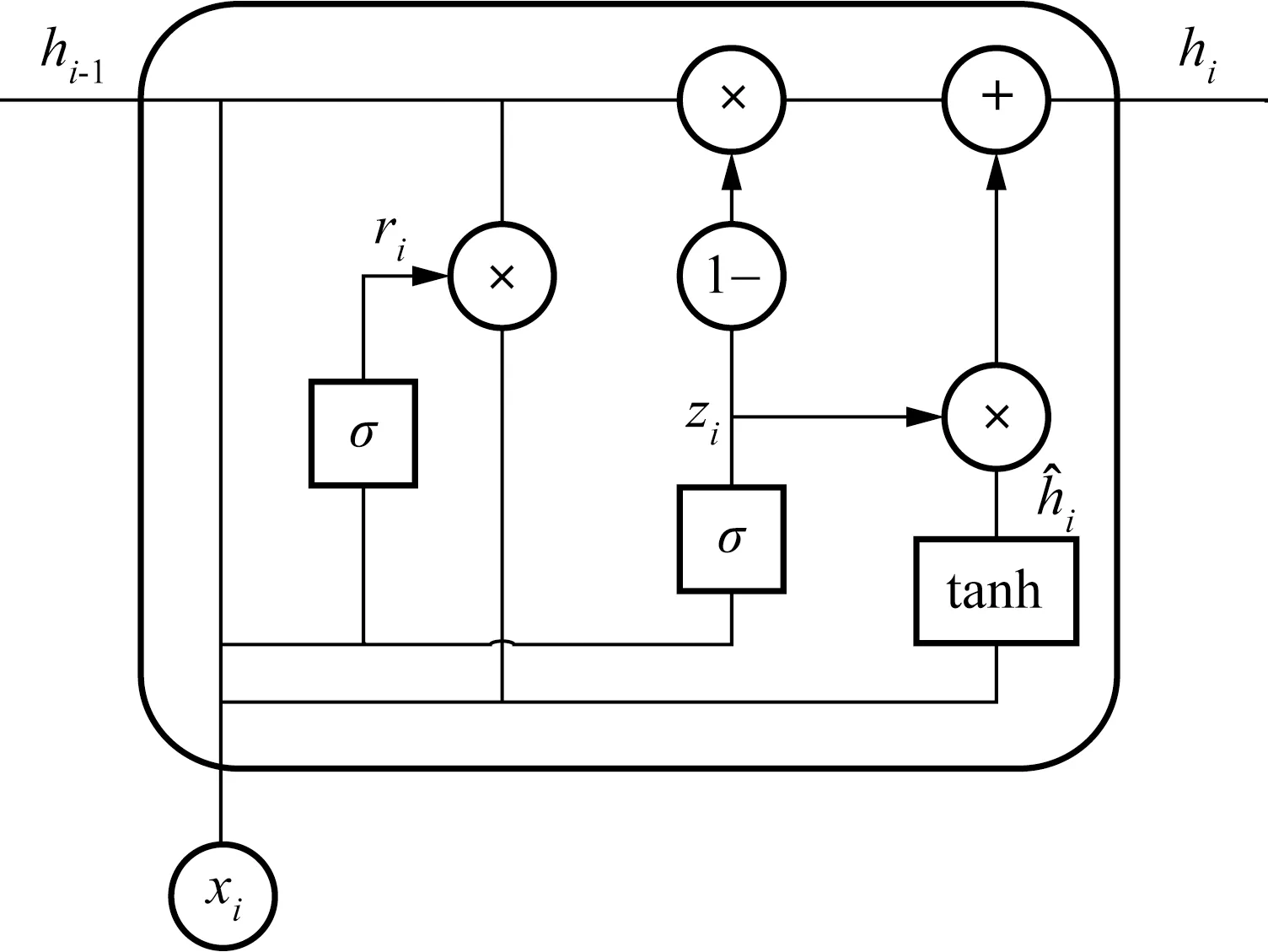
图2 GRU结构图Fig.2 GRU structure
GRU包含更新门ri与重置门zi。更新门用于控制上一时刻状态信息保留到当前状态中的程度,其值越大表明保留的信息越多;重置门控制当前状态信息与上一时刻信息的结合程度,其值越小表明忽略的信息越多。图2中,σ、tanh为激活函数Sigmoid函数与tanh函数,xi为GRU单元的输入,hi为GRU单元的输出。
zi=σ(W(z)xi+U(z)hi-1)
(2)
ri=σ(W(r)xi+U(r)hi-1)
(3)
(4)
式中:W(z)、W(r)、W、U(z)、U(r)、U为网络的可训练参数矩阵。
3 基于CNN-GRU的流型识别方法
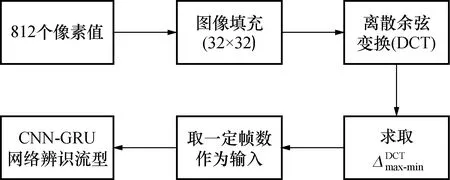
图3 流型辨识步骤Fig.3 Flow pattern identification steps
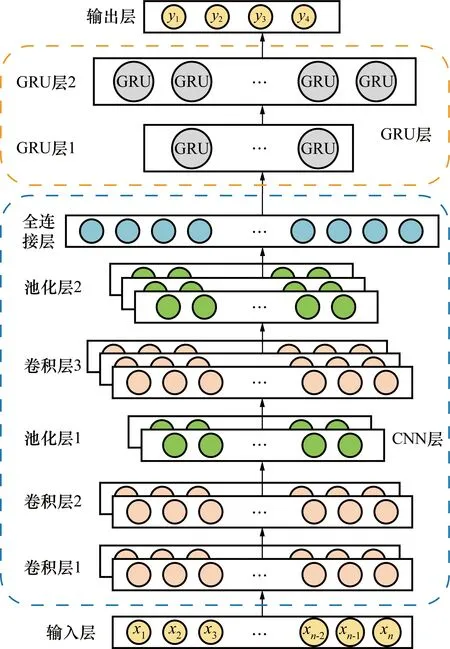
图4 CNN-GRU网络结构Fig.4 CNN-GRU network structure
对模型中每1层的描述如下:
1) 输入层。选取一定帧数的差值序列作为CNN-GRU网络输入,用X=[x1,x2,…,xn]表示。
2) CNN层。CNN层对输入数据进行特征提取,这里选用3个卷积层、2个池化层与1个全连接层构成CNN框架。卷积层均采用大小为3的卷积核,卷积步长为1,激活函数为ReLU。2个池化层均为最大池化,采用步长为3、池化核为3的不重叠下采样。全连接层激活函数选定为Sigmoid函数。CNN层的输出Hc计算过程为:
C1=f(X⊗W1+b1)=
ReLU(X⊗W1+b1)
(5)
C2=f(C1⊗W2+b2)=
ReLU(C1⊗W2+b2)
(6)
P1=max(C2)
(7)
C3=f(P1⊗W3+b3)=
ReLU(P1⊗W3+b3)
(8)
P2=max(C3)
(9)
Hc=f(P2×W4+b4)=
Sigmoid(P2×W4+b4)
(10)
式中:C1、C2、C3分别为3个卷积层的输出;P1、P2分别为2个池化层输出;W1、W2、W3、W4为权值矩阵;b1、b2、b3、b4为神经元偏置;max()为最大值函数;⊗为卷积运算。
3) GRU层。GRU层对提取出的特征进行学习,揭示其内部特征随时间变化的规律。GRU层框架由两层GRU单元组成,激活函数均选用tanh函数,循环步骤激活函数选用Sigmoid函数,第2层采用0.2的概率丢失输出,防止网络过拟合。t时刻时GRU层的输出计算如下:
H1=GRU(Hc,t-1,Hc,t),t∈[1,T]
(11)
H2=GRU(H1,t-1,H1,t),t∈[1,T]
(12)
式中:H1、H2为GRU层1、2的输出;T为时间序列长度。
4) 输出层。输出层的输入为GRU层输出,通过全连接实现流型识别。激活函数采用Softmax函数。
4 实验结果与分析
4.1 实验
在华北电力大学先进测量实验室的可移动气水两相流实验装置上进行实验操作。图5为实验装置示意图。
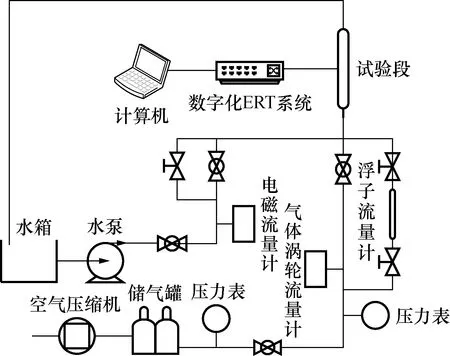
图5 实验装置示意图Fig.5 Schematic of experimental device
通过空气压缩机将气体压缩至储气罐内,依靠稳压阀维持气相压力稳定。调整阀门开度改变气相、液相流速,水气混合后可以在试验段观测到流动状态。水箱、水泵与管道系统构成水循环回路。
试验段管道内径为50 mm,安装16电极ERT阵列传感器,通过数字化ERT系统将采集的模拟量转换为数字量,连接计算机并进行图像重建。ERT系统内置算法设置为等位线反投影算法,该算法可以快速成像,这是保证流型识别实时性的前提,图6为ERT重建图像,每幅图像包含812个像素点。
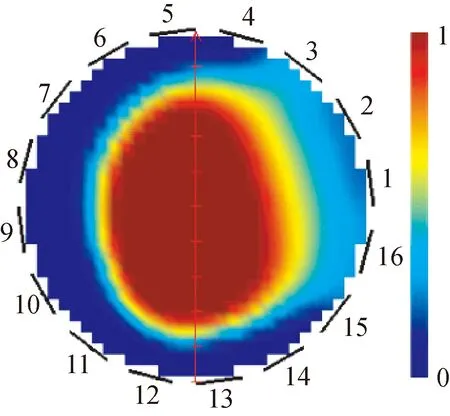
图6 ERT系统成像Fig.6 ERT system imaging
调整气相、液相流速,得到4种流型。每种流型采集10 000帧(120帧/s)图像,从计算机导出图像像素值。图7(a)~图7(d)分别为泡状流、泡状-弹状过渡流型、弹状流、段塞流流动图像。
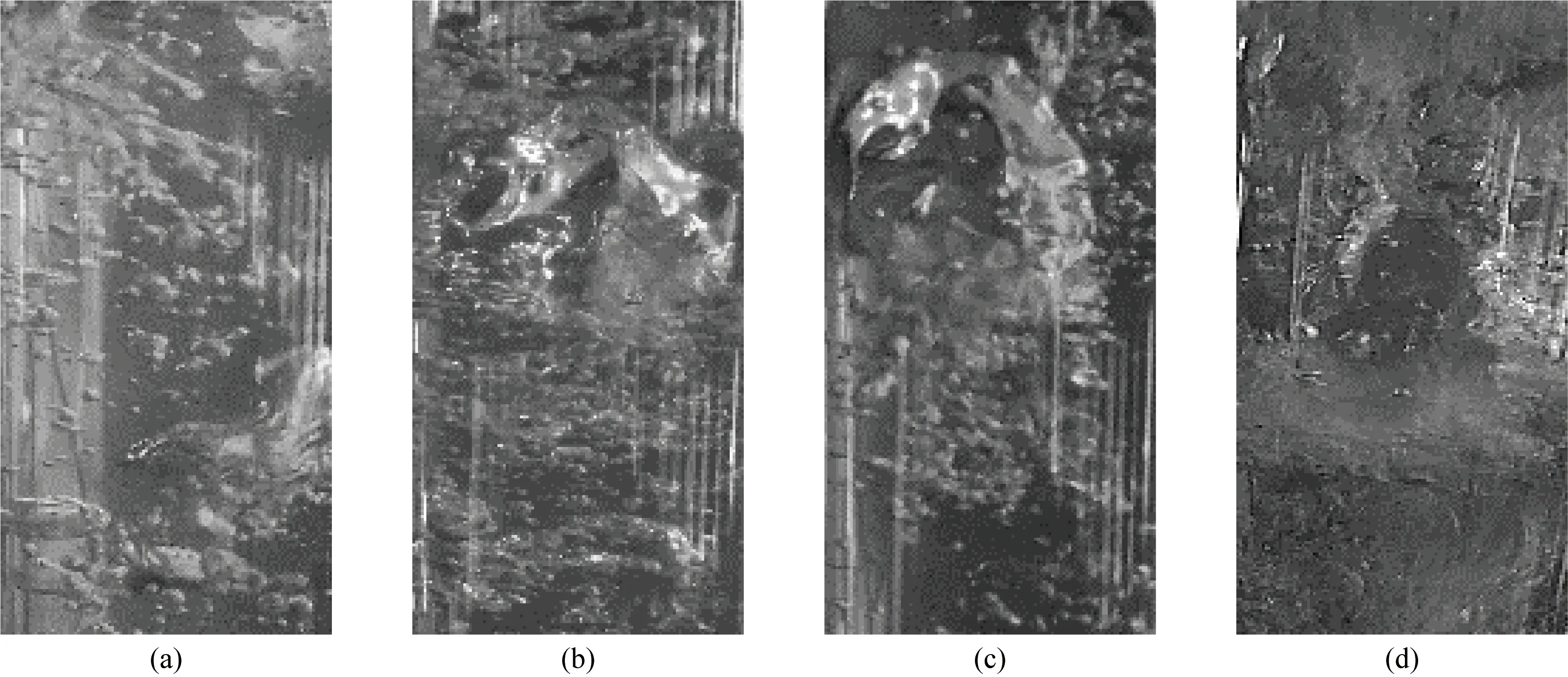
图7 流动图像Fig.7 Flow image
4.2 特征提取
将重建图像的812个像素填充至32×32像素,重建图像之外的像素值填充0,得到方形图像,才可进行DCT变换,以3种气泡大小的流型为例,对其进行DCT变换,并将其结果使用对数比例显示,结果如图8所示。
从图8中可以发现小气泡图像能量信号比较分散,原图像中有用区域较少,随着气泡区域变大,能量向左上角低频区域集中,并且由于伪影以及气泡大小影响,DCT结果图像的能量范围也会有一定的变化。
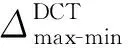
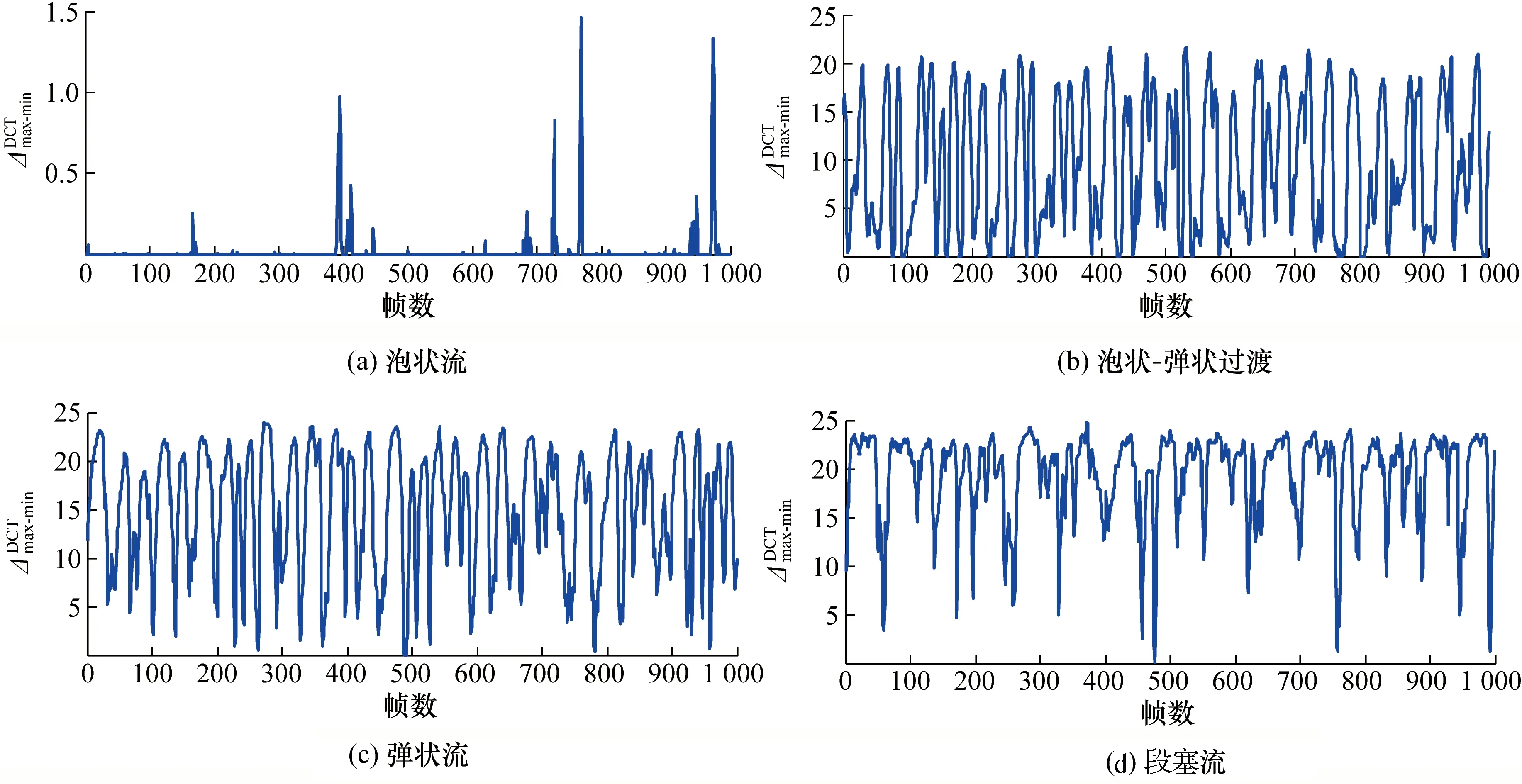
图9 不同流型变化Fig.9 Variation of under different flow patterns
4.3 输入向量长度对分类影响
对于每种流型的10 000帧ERT重建图像,进行特征提取之后,若网络输入向量长度越大,即选取的帧数越多,则样本数越少,为研究不同帧数的数据对CNN-GRU、CNN及GRU网络性能的影响,均选取每种流型9 000个样本,其中7 500个作为训练集,1 500 个作为测试集。
通过改变输入帧数长度,对网络完成训练,并采用测试集对3种网络进行性能测试,4种流型平均的分类准确率影响如图10所示。
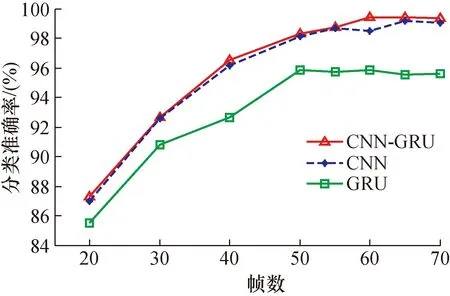
图10 帧数对网络分类准确率影响Fig.10 Effect of frame number on network classification accuracy
从图10可知,CNN-GRU、CNN及GRU网络性能分别在输入帧数长度大于60、65及50时趋于稳定。持续增加输入序列长度对网络分类准确率并无太大提升,却可因输出维度过大而加重网络负担,使训练参数变多,降低网络性能,因此选择GRU-CNN、CNN及GRU网络的最佳输入帧数分别为60帧、65帧及50帧。CNN-GRU、CNN及GRU网络对各流型测试样本的流型识别准确率如表1所示。
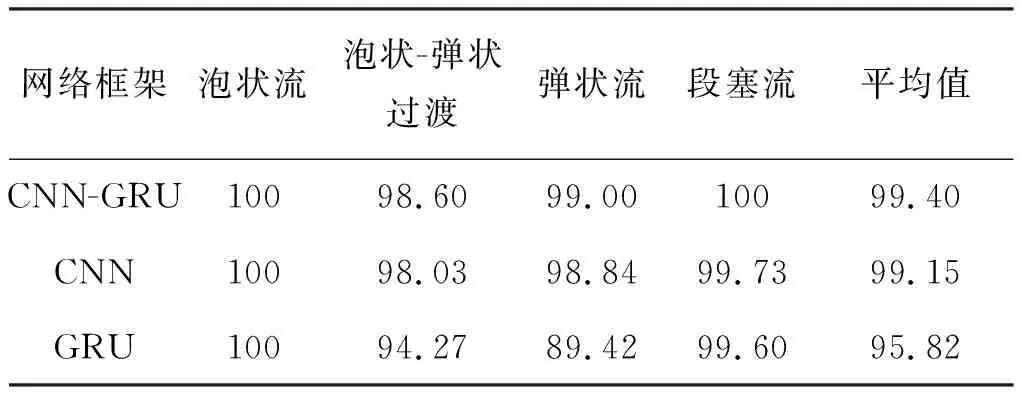
表1 流型辨识准确率Tab.1 Classification accuracy of each flow pattern (%)
从表1结果可见,CNN-GRU网络的分类准确率最高。CNN-GRU网络结合了2种网络的优点,相比于CNN网络,GRU单元的引入可以兼顾时域数据的相关性,相比于GRU网络,由于加入了卷积层,可以高效提取数据内部特征,减少了人为主观影响,因而有着更高的辨识能力。
泡状流数据序列波动范围小,其流型数据序列特点明显,3种网络框架识别准确率均可达100%;泡状-弹状过渡流型与弹状流的数据集波动情况类似,CNN-GRU网络对泡状-弹状过渡流型识别准确率可达98.60%,对弹状流的识别准确率可达99.00%,相对于CNN,其分类准确率分别提高了0.57%及0.16%,相对于GRU网络,其分类准确率分别提高了4.33%及9.58%;段塞流时数据在波动中向大数值集中更加明显,3种网络结构也都有着较好的识别能力,CNN-GRU网络识别准确率达到100%,相比于CNN及GRU网络分别提高了0.27%及0.40%。综上所述,本文构建的CNN-GRU网络流型识别准确率均高于CNN及GRU网络,平均识别率可达99.40%。
5 结 论
本文提出了一种基于CNN-GRU的垂直管道气液两相流流型识别方法。该方法通过对重建图像填充后转换到频域分析,提取最大DCT系数差值,选取60帧数据作为CNN-GRU网络输入,有效实现了流型识别。相对于直接将图像作为网络输入的传统方法,DCT处理使得提取图像特征信息更为简单,计算DCT系数统计量可以有效降低网络输入向量长度。CNN有着良好的特征提取能力,将CNN输出作为GRU网络的输入使得分类准确率有了显著提高。CNN-GRU网络对泡状流、泡状-弹状过渡流型、弹状流、段塞流的分类准确率分别为100%、98.60%、99.00%、100%。
