基于人工智能的LDI对位靶标精确识别方法探讨
2022-11-30曲鲁杰
方 林 董 帅 郑 超 曲鲁杰
(合肥芯碁微电子装备股份有限公司,安徽 合肥 230601)
1 绪论
随着5G通信设备、智能手机及个人电脑、VR/AR(虚拟现实技术/增强现实技术)及可穿戴设备、高级辅助驾驶及无人驾驶汽车等电子信息产业的快速发展,推动了全球高多层板、HDI(高密度互连)板、IC(集成电路)封装基板、多层挠性板等高附加值基板,FPD(平板显示),LED(发光二极管)产品的快速发展。从而行业的快速发展带来光刻行业对位靶标工艺的不断发展和工艺种类不断增加,这也给对位靶标的精确识别带来不断的挑战。
迄今为止,国外在激光直接成像(直写)设备领域已取得突破性的进展[1]-[6]。国内中科院,中国科技大学等国家重点实验室和机构也在进行激光直写技术的研究,使用激光直写技术制作了多种光刻掩膜[7][8]。而对于激光直写设备来说使用靶标进行精确对位是保证和提高精度的核心,随着人工智能技术的发展,我们结合人工智能相关技术和传统图像处理技术对靶标精确识别方法进行相关探讨。
2 常用靶标类型
LDI(激光直接成像)设备是通过精确抓取不同类型的靶标将需要曝光的图形和待曝光的基板建立映射关系,从而实现将待曝光的图像精确曝光到基板对应位置。所以靶标的精确识别是LDI设备精度的保证,是直写曝光技术的重要组成部分。
现阶段LDI使用的定位靶标以形状分类主要以圆形、梅花孔、圆环、孔矩阵、矩形、十字靶标为主,还有部分是多种形状组合而成的复合型靶标。多层电路板或者芯片载板多是由多层基板压合而成,不同层的基板由于制作工艺不同,会使用不同的工艺制作不同类型的对位靶标。常用的制作工艺有机械钻孔、激光[9]等,使用不同的感光材料[10]技术,CCD(工业相机)成像出的图像。
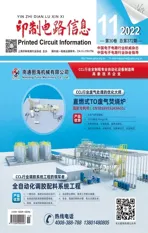
2.1 圆形靶标
圆形靶标出现的频率最高,种类最多。现阶段多种曝光光刻制程中出现频率最高的靶标感光材料主要有干膜,油墨和其他液态感光材料(如图1所示)。
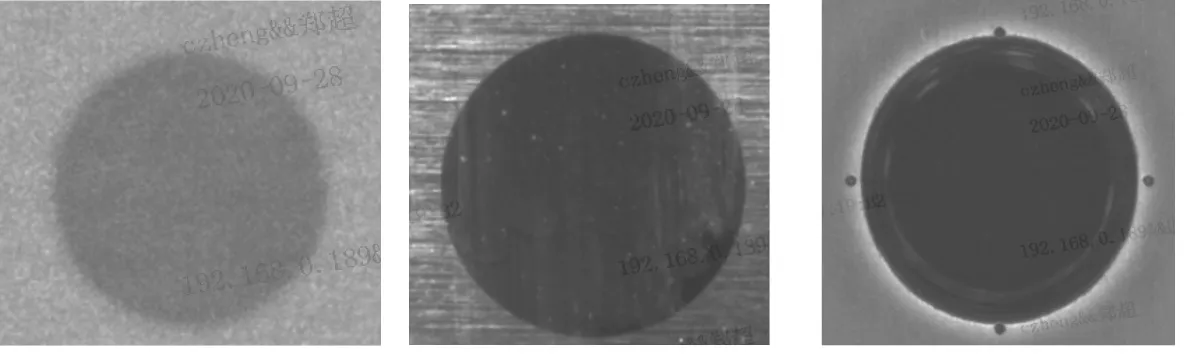
图1 圆形靶标例圆
2.2 圆环靶标
圆环靶标和圆形靶标类似(如图2所示)。
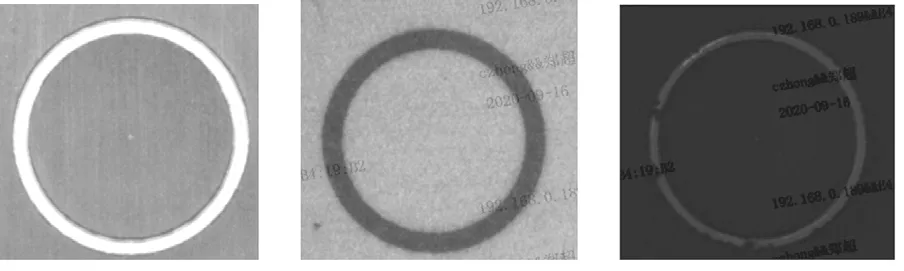
图2 圆环靶标例圆
2.3 孔矩阵靶标
孔矩阵靶标是指若干个靶点成矩阵式排布的靶标。由多个小圆靶标成矩阵排布而成。一般2×2至5×5规格情况较多(如图3所示)。
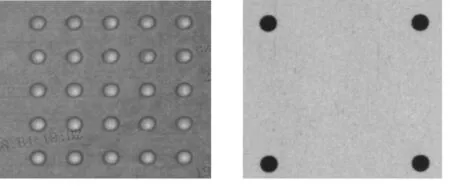
图3 孔矩阵靶标例圆
2.4 梅花孔靶标
梅花孔靶标类型较多,特征较为明显。多个小圆组成的环形靶标,多为偶数分布(如图4所示)。

图4 梅花孔靶标例圆
2.5 复合靶标
复合靶标类型较多,工艺也较多。从形状上大体上可以分为矩形靶标,环形靶标,盘通孔和圆环组合靶标等。此类靶标特征较多,大部分识别抓取均可以成功(如图5所示)。
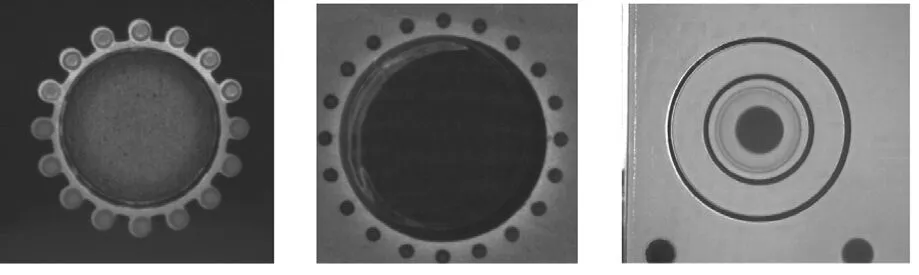
图5 复合靶标例圆
2.6 其他类型靶标
还有部分靶标出现较少,这里一起归纳总结(如图6所示)。
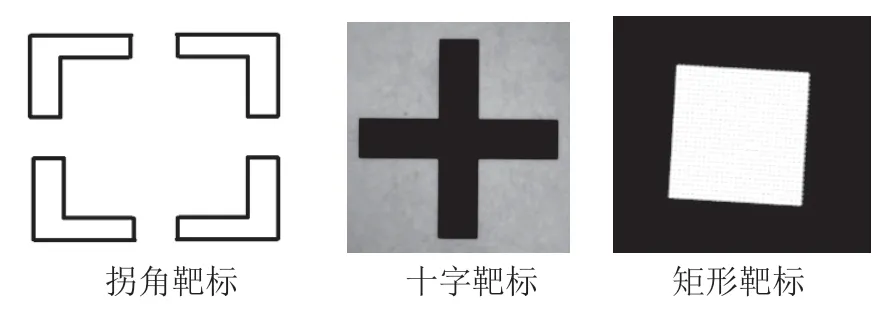
图6 其他类靶标例圆
3 检测难点
LDI工艺对位靶标由于制作工艺、感光材料、成像系统不同,各厂家的工艺水准参差不齐,造成了靶标制作存在多样性。这对靶标的高精度识别造成了较大的困难。
3.1 靶标制作工艺问题
受限于不同厂家工艺水平,靶标的边缘时常会出现破损,是因为机械钻孔的精度不够、激光能量不稳定、压膜贴合度低等问题造成的。从而造成靶标边缘出现破损毛刺、靶标深浅不均匀,边缘变形等问题,如图7所示。

图7 破损变形靶标图
3.2 材料显色性,感光性问题
部分型号的感光材料存在显色性不佳,感光性不好等问题。有的液态感光材料由于显色性问题,使用大功率激光制作靶标依然会出现靶标模糊的现象。
3.3 光学成像问题
不同材料使用合适的光学系统进行准确成像一直都是行业发展的聚集点。直写曝光工艺的靶标识别中受不同的材料工艺影响,光学成像系统的稳定成像会对精确抓取产生直接影响,例如成像反光,打光方向产生阴影,光源波段不匹配,光照穿透性,成像模糊等问题,如图8所示。
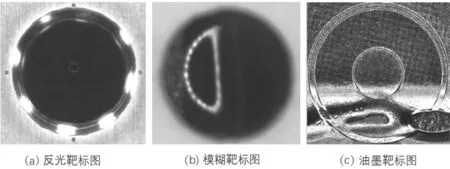
图8 靶标问题图
由相机、成像系统以及照明光源[11]组成的图像识别硬件系统通过对光的利用,可以实现在多种环境下采集高清的图像。适当利用反射光、透射光、均匀光,不同角度光、特定波长,能够实现最佳的图像采集效果。
4 精确识别算法
由于实际生产中会出现很多问题,很难使用一种检测算法兼容所有情况,故在实际生产中我们会采用多种方案解决上述问题,从而做到高精度检测对位靶标的目的。现阶段为了处理上述难点,在检测算法方面我们主要采用传统图像处理算法和深度学习图像处理算法相结合的方案,如图9所示。
4.1 粗定位算法
如图9所示,首先在靶标粗定位使用传统模板匹配算法和深度学习的目标检测算法可以有效地获取目标靶标的感兴趣区域。

图9 靶标识别流程图
4.1.1 模板匹配粗定位
目前模板匹配[12]主要有基于灰度的模板匹配和基于形状的模板匹配,主要的匹配算法是NCC算法[13]。此算法对于噪声和光照变化存在较好的稳健性,颜色匹配时直接将模板图与待检测图片通过此算法进行匹配检测,形状匹配时先使用亚像素轮廓提取算法处理待检测图像后再进行匹配。
4.1.2 基于Yolo目标检测粗定位
考虑到产能和小目标检测准确性情况,目前对于粗定位目标检测使用YOLOv5[14]算法进行目标检测,YOLOv5主要由Input(输入端)、Backone(主干网络)、Neck(混合传递特征)以及Prediction/Head(预测输出网络)四部分组成。
数据前处理方面,YOLOv5 算法集成了MOSAIC[15]数据增强算法,使用四张图片通过随机缩放,随机剪裁,随机排布的方式进行拼接。这种算法可以有效地丰富数据集数量,增加了小样本的数据量,使网络的稳健性更好。同时这种算法有效地减少GPU显存的容量,使得Mini-batch大小并不需要很大就可以达到很好的训练效果,有效地规避了梯度消失或梯度爆炸的情况发生。
4.2 图像预处理
图像预处理是图像处理领域里面的重要组成部分,在光刻生产工艺中,由于不同材质的基板,感光材料,工艺成像会存在较大差异,部分基板自身存在较大纹理特征会对靶标识别产生干扰。故使用图像预处理相关算法是很有必要的步骤。现阶段预处理算法主要是滤除噪声和对于模糊图像进行增强对比度处理。
4.2.1 滤波
现阶段对于图像的滤波[16]主要是使用双边滤波和中值滤波[17]相结合的方式进行。中值滤波可以有效去除椒盐噪声,此滤波算法对于去除基板铜板表面部分高频噪声点有着显著效果。
双边滤波[18]是一种可以保住高频边缘同时去除噪声的滤波器,采用此算法可以有效磨除基板靶标表面纹理,而保留靶标高频边缘信息。双边滤波同时考虑空间域和像素域信息,结合两个域的权值获取最终结果。
4.2.2 图像增强
目前使用最多的图像增强算法是直方图统计图像增强[19][20],此算法可以有效地对指定直方图区域进行拉升增强,对于很多感光性不佳的材料成像有着较好的处理效果。
如对于显色不佳的靶标使用图像增强的算法增强靶标对比度,如图10所示。之后使用迭代筛选剔除错误的轮廓点获取最终检测结果。
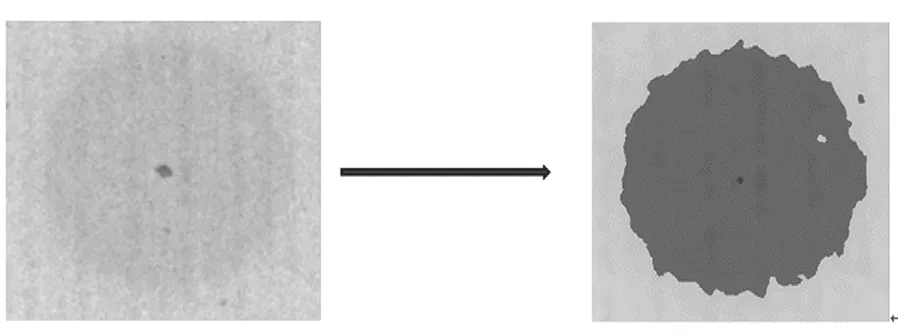
图10 靶标预处理图片图
4.3 精确定位
对于不同成像的靶标图片采用不同的精确检测算法。对于边缘锐利的靶标图片可以直接使用轮廓筛选检测算法直接检测靶标相关信息;对于边缘模糊的靶标图片采用深度学习语义分割算法可以较为精确地分割靶标和背景区域;对于边缘存在破损的靶标,使用卡尺检测算法可以有效地筛选剔除错误的边缘点,最后检测出靶标的相关参数。
4.3.1 语义分割
UNet语义分割[21][22]是一个浅层网络接口,提出的初衷是用于医学图像分割,此网络是一种U型网络结构。
Unet网络非常的简单,前半部分就是特征提取,后半部分是上采样。在一些文献中把这种结构叫作编码器-解码器结构,由于网络的整体结构是一个大些的英文字母U,所以叫作U-net。
图11是使用UNet网络进行语义分割后的靶标检测效果图,可以看出通过语义分割的方式可以有效地分割图片的靶标和背景区域,之后再通过边缘拟合的方式获取准确的靶标中心点坐标。

图11 语义分割图
4.3.2 灰度卡尺检测算法
卡尺算法是将待检测区域划分成多个感兴趣区域。每一个感兴趣区域单独计算像素值,使用最大梯度变化准则,或者尺度变化,梯度方向等多种方案进行删选获取一个最佳像素点作为每一个感兴趣区域的返回值。使用卡尺划分成多个感兴趣的区域,每一个区域获取一个最佳像素点,之后通过最小二乘算法将筛选出的像素点按照圆公式拟合获取中心点坐标值。通过此算法将靶标划分成多个区域单独检测轮廓点像素,对于部分边缘梯度变化不明显的靶标图片可以有效地检测出靶标边缘点坐标。
4.4 结果校验
靶标检测出结果后需要根据先验信息对检测结果进行校验。对于类圆型靶标可以使用圆度校验的方案进行校验;对于矩形,十字和拐角类靶标可以使用直角度校验的方式进行校验;对于由多个图形组成的复合型靶标,由于会检测出多个中心参数,所以可以使用欧氏距离或者马氏距离检验中心点坐标的方式进行校验。此类校验可以有效地规避错误检测情况,对于复合型靶标检测中心点欧氏距离可以有效地剔除破损严重的靶标,从而避免偏位情况的发生。
5 检测结果
5.1 测试结果
按照第二章的靶标类型建立样本库,使用前面所述的算法进行抓取检测。测试靶标类型圆、孔矩阵、梅花孔、矩形,圆环、十字;分别测试抓取精度,重复抓取稳定性,抓取时间等指标。
由表1测试统计表可以看出总体来说使用传统卡尺算法进行精确计算检测准确率和重复抓取稳定性较好,使用语义分割算法运行速度较快。但是对于部分边缘较为锐利,背景相对简单的靶标样本,如图12所示,使用基于语义分割的算法检测可以得到精确并且高效地获得检测结果。
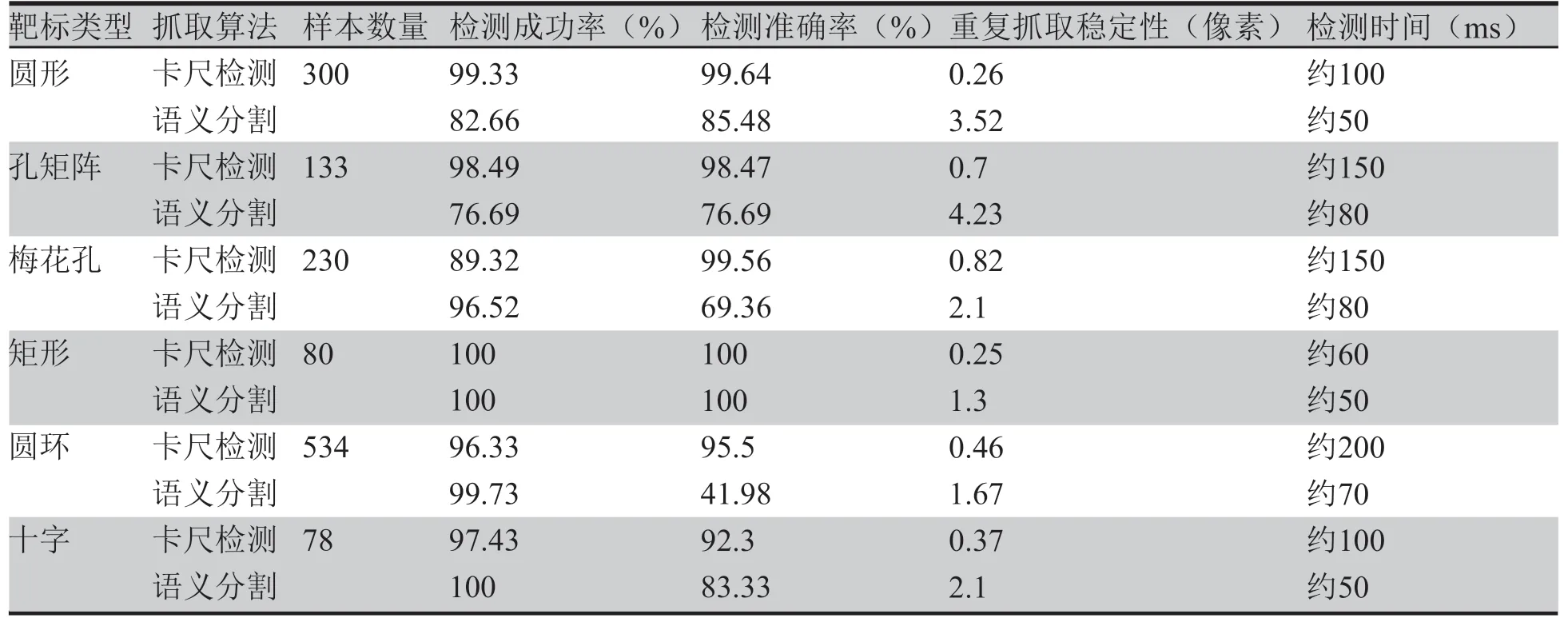
表1 测试统计表

图12 语义分割靶标图
5.2 结论分析
(1)光刻工艺种类较多,现阶段很难使用一种算法可以解决所有问题,根据不同的工艺情况设置不同的检测算法是一种较为合理的处理模式。单独的基于深度学习的图像算法和传统图像处理算法均很难单独解决所有问题,故根据不同情况使用深度学习图像算法和传统图像处理算法相结合的方式是比较合理的处理方案。
(2)靶标粗定位中在数据量足够的情况下使用基于深度学习的目标检测算法可以得到较好的检测结果。但是行业的特殊性决定收集数据和训练数据往往花费大量的时间和人力成本,故传统模板匹配算法虽然稳健性低于深度学习算法,但是往往在时间和人力成本方面可以更为高效地处理特定问题。
(3)在精确定位方面基于深度学习的算法现阶段在亚像素级的检测中精度和抓取稳定性方面低于传统算法。