多飞行器协同关键技术研究现状与展望
2022-11-29刘振宇刘炳琪杨春伟王继平
刘振宇,刘炳琪,杨春伟,王继平
(1. 火箭军工程大学,陕西 西安 710025;2. 96901部队,北京 100096)
1 引言
未来作战将是体系与体系的对抗,随着对抗与防御技术的不断发展,单飞行器远程作战的难度逐渐增加,多飞行器协同作战将是未来的主流模式。多飞行器协同技术是指根据任务作战需求,保证飞行器通过专用的信息支撑网络组成一定规模的编队,并使编队具备态势感知和群体认知能力,能依据综合作战效能最大原则,自主地实施编队决策与管理,并导引与控制编队完成作战任务的原理、方法与技术[1]. 采用多飞行器协同体制,可从时域、频域、空域等多方面提高飞行器武器系统的复杂电磁环境适应能力,提高对干扰的识别和对抗能力[2].目前,世界各国发展的多飞行器协同技术有很多模式,如俄罗斯“花岗岩”超声速反舰导弹,能够融合卫星与多种传感器数据,并通过多弹之间目标信息实时共享,从而完成打击任务分配并实施自主攻击[3]. 美国的“网火”系统将目标侦察、火力打击、性能评估和任务规划等能力结合在一起,设计了一种基于空间信息网络支持的、自主与受控攻击融于一体的编队协同作战模式[4]. 而我国目前多飞行器协同研究主要集中于无人机协同作战领域。
本文对典型多飞行器协同作战任务阶段进行了系统概述,对包括协同组网、编队控制、协同搜索、信息融合以及协同制导等关键技术研究现状进行了分析总结,并对各关键技术未来发展进行了展望。
2 多飞行器协同作战流程
以典型反舰导弹协同作战过程[5]为例,将多飞行器协同作战任务剖面加以区分,整个作战过程可分为四个阶段:编队组建阶段、协同探测阶段、协同突防阶段和协同攻击阶段。

图1 反舰导弹协同作战典型场景示意图[5]
2.1 编队组建阶段
编队组建阶段是指飞行器从起飞直至进入探测阶段前的过渡阶段,在此期间飞行器按照提前规划的飞行轨迹与起飞时间飞向编队集结地点,到达集结区域后,各飞行器开始广播组网申请信号,同时监听周边飞行器的组网申请信号。通过协同决策机制和预先设置的编队策略进行组网编队飞行。
2.2 协同探测阶段
飞行器编队组建完成后,进入协同探测阶段。这一阶段各飞行器通过编队内组网通信持续对航路周边态势进行协同感知,对威胁源进行快速协同定位和威胁评估,自主智能规划飞行航路,并根据任务需求进行编队分离、重组等动作。
2.3 协同突防阶段
飞行器协同作战的中后阶段,开始进入敌方控制区域,出现敌方系统的预警探测和防空拦截手段。此时各飞行器通过编队内或编队间共享目标和威胁感知信息,对打击目标和威胁源进行快速识别定位和态势评估,并经过自主决策,选择合适突防时机与突防策略突破敌方防空体系。
2.4 协同攻击阶段
飞行器编队到达打击任务执行起始位置后,进入末段攻击阶段。综合编队现有作战资源与当前环境态势,通过目标分配算法为每个飞行器分配打击目标,而后各个飞行器基于任务要求采取协同制导实现对目标的协同打击。同时将打击信息回传,为后续任务制定与战场态势评估提供依据。
3 关键技术及研究现状
3.1 协同组网通信
在多飞行器协同执行作战任务过程中,无论是编队协同控制,或是协同目标搜索与识别以及协同战术决策,都要求各作战单元之间能实现连续不间断、高度密集、实时的信息交换,因此协同组网通信是飞行器协同作战的首要前提,按照组网结构可以将多飞行器组网通信分为:集中式,分布式以及混合式三类[6].
集中式组网结构存在一个中心节点,其它所有飞行器的探测信息以及状态信息都汇集至中心节点,在网络中心节点完成集中计算与统一的分析决策整个系统的操作都由中心节点进行控制。分布式组网结构不存在中心节点,每个飞行器都将自己的状态信息与感知信息与网络中与之相互连接的飞行器进行协商融合,整个系统的控制与全局决策的制定是通过飞行器之间的协调与协作完成的。混合式组网结构是集中式与分布式的有机组合。整个系统分为多层结构,第一层称为群,每个群采用集中式组网结构,每个群的中心节点构成第二层,采用分布式组网结构,依此类推可以构造任意层数的协同通信网络。表1对三种组网结构的优缺点进行了总结比较。
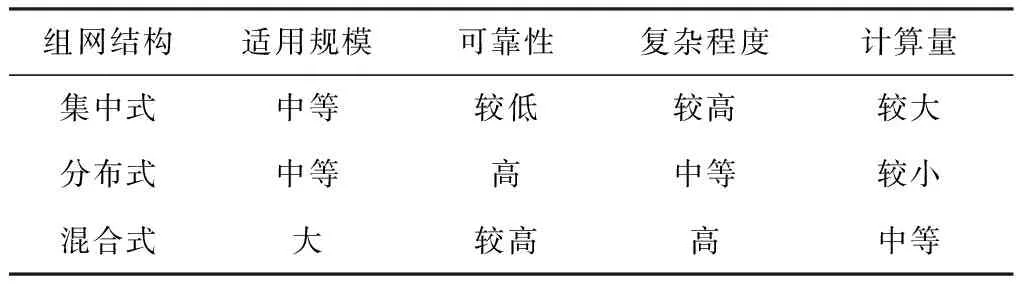
表1 不同组网通信结构性能对比
3.2 协同编队控制
编队飞行控制是多飞行器协同系统的重要组成部分,在执行任务过程中发挥着重要作用,如在协同探测任务中面对不同的环境与目标,需要设计合理的编队队形以满足高精度探测要求,在多飞行器协同作战过程中,主—从模式适用于楔形编队,而如果需要规避敌方雷达侦测,则应采用纵向编队[6]。目前较为常见的编队队形有平行编队、菱形编队、楔形编队、纵向编队等[7]。目前多飞行器编队控制策略主要可分为三类:leader-follower法[8-11]、基于行为法[12,13]、虚拟结构法[14-16],每种编队方法适应不同的任务与环境,各有独特的优缺点。
1) leader-follower方法。leader-follower方法是目前多飞行器编队控制中最常用的方法之一。其实现方式是leader按照预先设定的轨迹飞行,而follower则可以通过局部控制律实现对leader相对位置的稳定控制。文献[8]研究了采用leader-follower方法进行编队控制时的无人机运动学约束问题,基于倾斜角度、失速速度和最大速度约束等对编队可飞行工作区域进行了分析。此外许多学者也提出了多种改进的leader-follower方法实现多无人机编队控制用于不同环境,比如网络通信受限、机载GPS定位系统拒止使用等情况[9-11]。leader-follower法将编队控制问题转换为了误差跟踪问题,因此容易实现,扩展性较强,同时能够降低编队内部的通信要求;然而在编队内部follower没有明确的反馈,此外,leader的故障可能导致整个编队失去控制。
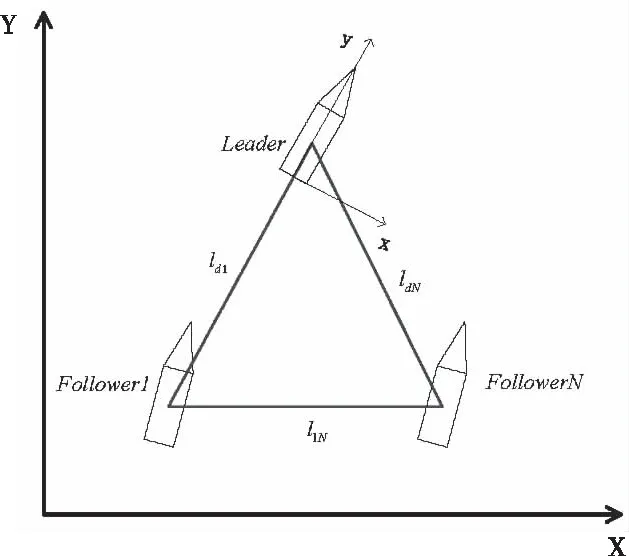
图2 leader-follower法控制策略
2)行为控制法。其基本原理是通过定义飞行器的几种基本控制行为,如防撞、跟随、避障等,而飞行器通过对定义的基本行为进行加权组合生成控制指令,这样系统中的每个单体都具备依据自身决策来协同其它单体完成目标或任务的能力。文献[12]基于行为控制法提出了一种只需要相邻个体以及障碍物之间相对位置的信息的分布式编队控制方法,同时引入逃逸角的概念以避免个体之间的相互碰撞。文献[13]基于行为控制方法提出了一种扩展的基于分散共识的多智能体系统控制算法,用于简化无人机群的复杂行为控制问题。行为控制法在传感器数据错误或缺乏的情况下仍然具备保持整个编队的能力,但该方法由于通过预设信息和触发条件来形成控制指令,因此降低了编队的适应性和灵活性;此外,行为控制法的鲁棒性与稳定性分析存在很大困难。

图3 行为控制法控制策略
3)虚拟结构法。虚拟结构法是一种集中式控制方法,首先由Lewis和Tan等[14]在1997年提出,编队中无实体leader,但在编队中设定一个虚拟leader或虚拟几何中心,所有成员都参照虚拟leader或虚拟几何中心运动。文献[15]在非线性模型预测控制框架下基于虚拟结构方法设计了一种多无人机编队最优控制律,将碰撞与障碍物惩罚项加入目标函数,同时实现了无人机的避碰与编队稳定控制;文献[16]考虑了舰船编队航行问题,利用滑模控制器解决虚拟结构的形成问题,并在控制器设计中引入径向基函数神经网络来逼近不确定性误差。虚拟结构法鲁棒性较强,控制精度较高,避免了leader-follower方法中leader出现故障时整个编队失控的缺点。然而合成虚拟长机需要较强的计算能力,并且难以控制编队实现队形变换,这也限制了其在实际中的应用。
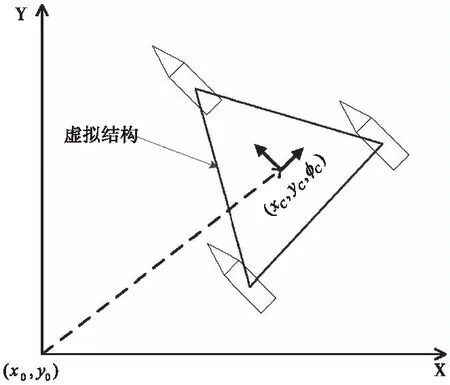
图4 虚拟结构法控制策略
尽管到目前为止,关于飞行器编队控制有了大量的研究,但仍然面临着许多挑战。一是在队形变换过程中为了实现避碰与躲避障碍,可能导致飞行器之间的通信链路断开;二是在编队控制器设计过程中没有考虑到飞行器的输入和状态约束;尽管模型预测控制策略[17,18](MPC,Model Predictive Control)可以同时处理输入饱和、连通性维护和避碰约束,但由于控制指令生成需要较大的计算量,这意味着其实时性难以保证。下一步的研究应重点关注上述问题。
3.3 信息融合处理
信息融合(Information Fusion)是指利用计算机技术对多个传感器的量测数据依据某种准则进行自动分析与优化综合来实现一定估计和决策任务所进行的数据处理过程[19]。信息融合技术随着多飞行器协同探测的不断发展逐渐受到重视,通过信息融合可以有效增大飞行器编队的探测范围与时间覆盖能力。按照将信息抽象的层次不同,可以将信息融合划分为数据级融合(也称信号级融合)、特征级融合、决策级融合三个层级[20]。
数据级融合属于最低层次的融合,它将来自同类型的传感器原始观测数据首先进行融合处理,最后对融合后的数据进行特征提取与身份识别。实现这种数据级的信息融合,要求必须是若干个同类型传感器。特征级融合在三级融合模型中介于数据级和决策级中间。各个传感器分别对目标进行观测并提取特征向量并送给融合中心,然后在融合中心完成联合特征向量融合,最终产生身份估计。决策级融合在三级融合模型中是属于最高层次。每个传感器基于各自的观测完成特征提取与身份识别之后,在将带有身份识别的特征信息传送给融合中心,然后在融合中心完成全局决策的融合。
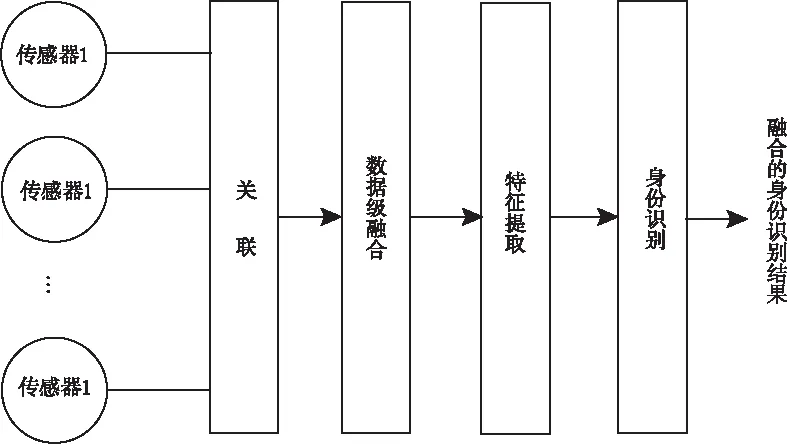
图5 数据级融合结构示意图

图6 特征级融合结构示意图

图7 决策级融合结构示意图
3.4 协同制导技术
随着飞行器防御系统与拦截器的不断发展进步,单个飞行器突破防御系统的封锁与拦截越来越困难,而多飞行器协同攻击则是一种能够有效突破防御系统的攻击策略,这是在当前技术瓶颈下提升导弹作战能力的另一种解决方案[21],这使得协同制导与控制技术在近年来得到了长足的发展。现有的协同制导研究大体可以分为非合作导引[22-25]与合作导引两类[26-29]。非合作导引律通过预先为每个拦截器分配相同的期望命中时间并通过攻击时间控制制导律[22](ITCG,Impact Time Control Guidance)实现同时到达。相反,合作导引是通过飞行器之间的信息交换来实现到达时间同步。
文献[22]首先提出了一种攻击时间控制制导律(ITCG,Impact Time Control Guidance),并将其应用于多导弹同时到达任务。这激发了许多关于非合作导引律的研究。文献[23]利用李亚普诺夫稳定性理论提出了一种攻击静止目标的制导律,并能满足命中时间约束;文献[24]改进了剩余飞行时间估计算法,提出了一种精度更高的ITCG;文献[25]基于滑模控制理论提出了一种拦截机动目标的导引律,并且能够实现攻击时间控制。尽管非合作导引律能够实现飞行器的同时到达,但是飞行器之间缺乏自主协同。事实上,非合作导引律本质上是开环的,因此其对于未知干扰是高度敏感的。
合作导引通过通信网络在飞行器之间交换信息,是克服非合作导引缺点的有效途径。文献[26]通过改进剩余飞行时间估计算法,并利用一致性算法实现剩余飞行时间协同,设计了一种三维时间协同制导律;文献[27]基于滑模控制理论,提出了一种三维时间协同制导律,同时设计了基于事件触发的控制策略,在保证制导性能的同时有效减小了资源利用负担;文献[28]将交战模型进行转换,提出了一种无数值奇异的分布式协同制导律。文献[29]将飞行器视场角约束转换为智能体的类速度约束,基于一致性理论提出了一种带视场角约束的三维协同导引律,但存在制导过程需要进行导引律切换的缺点。
近年来,协同制导技术尽管得到了长足发展。但仍然还有许多问题有待解决。一是许多制导律存在数值奇异性,当飞行器与目标距离或速度前置角接近零时,制导指令会发散到无穷大[27,30]。二是现有的协同制导律大多依赖于对剩余时间的精确估计[23,24],这也激发了许多关于提高剩余时间估计精度的研究[31,32]。三是必须在导引律设计中考虑到多个飞行器之间的网络交互。协同制导是一个网络化的动态系统,存在通信距离受限、通信时延大、切换拓扑结构复杂等实际问题。然而,由于高度非线性的系统动力学,这些重要问题在协同制导的文献中很少被分析。
4 结论与展望
本文从多飞行器协同作战基本过程出发,对支撑协同作战的各项关键技术进行了梳理和总结,尤其是编队控制与协同制导技术。总体来看,多飞行器协同涉及到多个学科多项关键技术,各项技术也还存在许多问题与挑战,距离实际应用还存在一定距离。
尽管关于多飞行器协同的研究与应用已经有了很多新的进展,但距离实际应用还远未成熟,未来可以从以下几个方面开展深入研究:
1)信息交互是多飞行器协同的基础,而高速运动的飞行器与快速变化的外部环境对通信质量会产生不可忽视的影响,因此实现高动态复杂环境下的稳定通信至关重要;
2)目前的编队控制策略大多只具备单一的功能,如队形保持、队形变换等。而如果采用控制策略切换的方法可能会导致编队失控与控制指令不连续的问题,需要研究能够处理多种约束并具备实现多种功能的编队控制策略;
3)目前的信息融合策略大多基于同构传感器测量数据的融合,而异构传感器的信息融合是异类飞行器协同过程中必须要考虑的问题;
4)协同制导律的设计必须考虑到多个飞行器之间的网络交互存在通信距离受限、通信时延大、切换拓扑结构复杂等实际问题,然而,由于高度非线性的系统动力学,解决这些问题仍然存在许多困难。
