移动三维激光技术在隧道环片收敛监测中的应用
2022-11-26李捷斌
王 宁,李捷斌
(1.陕西工业职业技术学院,陕西 咸阳 712000;2.咸阳市数字城市与地理空间大数据技术重点实验室,陕西 咸阳 712000)
我国地铁隧道结构主要以盾构法施工,隧道结构通过预制管片错缝拼接成环,形成供列车行驶的封闭空间。地铁隧道运营期间由于管片老化、技术条件、地质条件变化等影响,环片内径不断发生改变,严重危害隧道结构的健康,威胁地铁隧道运营安全,因此径向收敛监测一直受到地铁运营公司的高度重视[1]。CJJ/T 289-2018《城市轨道交通隧道结构养护技术标准》[2]和GB/T 39559.3-2020《城市轨道交通设施运营监测技术规范第3部分:隧道》[3]中对运营期间隧道管片径向收敛进行了明确规定。传统径向收敛监测是在列车停运后监测员利用全站仪、测距仪、收敛仪等设备对区间内的环片进行抽样监测,不仅监测速度慢、监测点稀疏,而且监测成果不全面,存在大量监测盲区。如何快速全面地进行隧道环片监测一直是行业关注的问题。三维激光扫描技术是一种新型非接触式高精度测量技术,通过高速激光测距技术获取被测物体的空间、几何信息等。目前该技术高速发展,精度不断提高,可达每秒百万点云数据的采集效率,可大幅提高测量速度。针对隧道结构收敛监测的特殊工程需求,该技术恰巧能弥补目前传统监测技术的不足。冶存玺[4]等采用站式激光扫描技术采集、拼接地铁隧道结构点云,采用横断面分层切片的方式提取隧道断面;闻永俊[5]采用全站仪、扫描仪、标靶球相结合的方式获取点云数据,利用全站仪对各站靶球进行定位,统一各站点云数据坐标系,降低了点云拼接误差;唐琨[6]等利用区段拟合方法提取中轴线节点,通过中轴线上节点坐标偏移量提取隧道结构变形量。移动三维激光扫描技术是架站式技术的进一步发展,不仅拥有架站式扫描快速获取点云的能力,而且克服了架站式扫描数据采集慢、点云拼接麻烦的缺点,利用轨道式扫描作业方式更加符合地铁隧道距离长、空间狭小、呈带状分布的特点。因此,本文采用移动三维激光扫描技术径向收敛方法对某地铁线路区间盾构环片进行全覆盖扫描采集,再利用后处理软件对隧道内环片进行逐环批量自动化提取,并根据提取的环片信息逐环监测环片径向收敛变化值。该方法不仅提高了监测效率、缩短了监测周期,而且弥补了传统监测存在的大量盲区以及架站式扫描数据拼接慢、误差大等缺陷,将成为未来地铁隧道结构变化监测技术的发展趋势。
1 隧道结构径向变形
1.1 环片径向变形
地铁盾构隧道是由多个大小不一的预制管片拼接而成的,每个管片严格按照其设计要求预制加工,盾构机在掘进过程中将管片按照一定规则进行拼装,形成标准圆环隧道。地铁运营期间隧道环片周边承载力发生变化,导致环片不断偏离最初设计形状。如图1所示,环片设计标准外径为R,内径为r,由于环片周围压力P1、P2、…、Pn各不相同,环片形状由设计标准圆变成近似椭圆。因此,在地铁运营期间必须对隧道环片的变化趋势和变化量进行监测,径向收敛监测是判断环片与设计偏差量的重要指标。
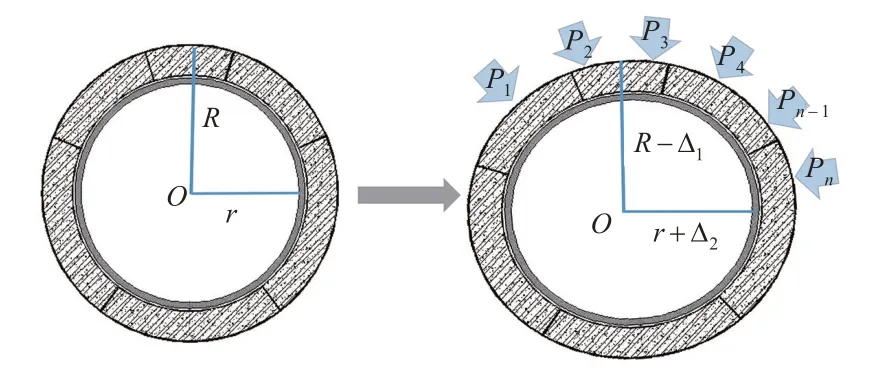
图1 隧道环片变形示意图
1.2 传统收敛监测方法
传统环片径向监测方法主要包括定点观测法、全站仪拟合法和收敛传感器监测法,通过在环片对应两侧设定监测点或埋设传感器的方式获取环片收敛变形。全站仪拟合法通过在环片内随机均匀测量9~12个监测点坐标拟合环片椭圆,获取水平收敛变化量[7-8]。然而,上述方法均采用环片抽测的方式,且抽测环片仅有少量监测点进行收敛监测计算,因此在环片收敛监测中存在较大的监测盲区,且监测效率较低。移动三维激光扫描技术具有测点密、速度快、精度高等优点,近年来在隧道环片监测中逐步得到应用。
2 移动三维激光扫描技术分析
2.1 移动三维激光扫描技术的基本原理
移动三维激光扫描技术由传统地面站扫描技术发展而来,融合了激光扫描、定位定姿、时间与空间同步技术、通信技术等[9]。利用运营地铁线路的轨道,以电力驱动小车为载体,将断面扫描仪与平台相结合,采集设备平台沿地铁轨道匀速前进,断面扫描仪不断向隧道壁发射激光获取隧道壁结构点云,随着采集长度的增加,在移动方向构建一个空间维度[10],实现隧道结构数据的三维采集(图2)。随着扫描距离的增加,获取的点云数据不断增加,按照空间和时间将扫描后的海量点云数据展开,完整保留隧道结构的几何形态。以海量点云为基础,对点云数据进行分割提取,进而对隧道环片进行逐环收敛分析。
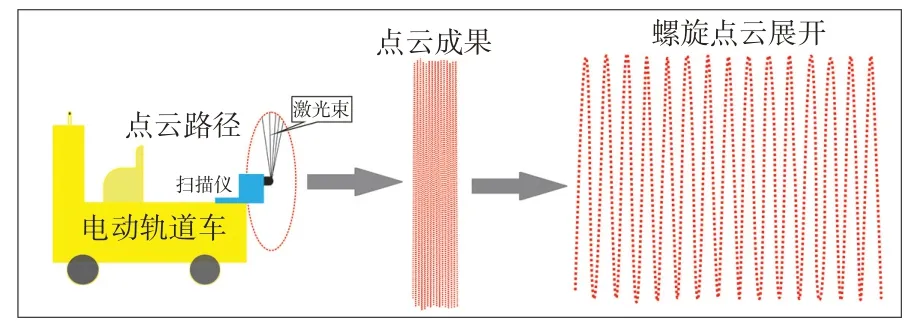
图2 移动三维激光点云获取原理图
2.2 三维激光收敛监测方法
采用三维激光点云数据进行隧道环片断面收敛监测的基本思想为:通过点云预处理对整个区间的点云数据进行融合去噪,尽可能剔除对结构断面提取影响较大的噪声,并将隧道真实里程与点云长度进行融合,保证隧道点云与隧道环片的空间配准[11]。逐环断面提取的核心是将去噪后的点云数据,沿天顶方向隧道中心线展开,构建隧道点云图像,采用图像识别方法获取相邻环片的拼接缝。由于激光点云是大量离散点,因此通过点云对环片直接逐环切割较为不便,需将点云数据投影展开。本文采用的数据采集激光器为德国Z+F9012扫描仪。该激光器每秒200转,可获取100万点,即单帧(一个螺旋)约有5 000个激光点,因此栅格化格网最多不能超过5 000个网格,点云栅格化网格横向大小为4 931。根据隧道内径为5.4 m,可计算得到每个格网的宽度约为3.44 mm,因此每个单元网格正方形纵向宽度设置为3.44 mm。由于自研数据处理软件界面设计每张图像铺满软件显示区域为纵向6848个单元格网,因此将点云投影到构建的4 931×6 848的格网中,对点云数据进行栅格化处理,实现激光点云数据向灰度图像的转换。点云栅格化示意图如图3所示。
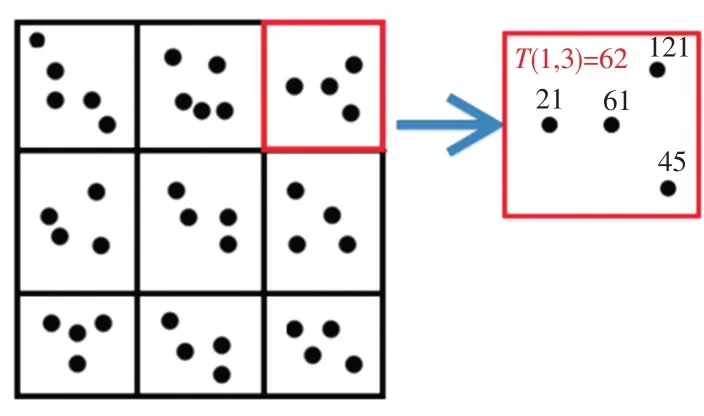
图3 点云栅格化示意图

式中,Tij为图像矩阵中(i,j)位置的灰度值;Iij为位于点云(i,j)栅格内点的强度值;n为该栅格内的投影点云数量。
灰度影像展开以隧道顶部中心线为基准,因此灰度影像的中线与隧道的中线保持一致,地铁隧道常用的环片宽度为1.2 m或1.5 m,数据处理软件已对其进行预设,也可根据实际工程中环片的宽度在数据处理软件中设定和修改。环片缝的识别,首先利用环片宽度以及工程起始和终止里程对环片缝进行粗定位,由于栅格化后的隧道影像为灰度影像,图像中每个栅格的灰度值在0~255之间,因此利用灰度图像梯度变化在粗定位环片缝的两侧宽度30 cm内进行图像梯度分析;再根据环片拼接缝方向与隧道纵轴反向垂直且贯穿的特点,实现环片拼接缝的精识别。如图4所示,经过人工简单交互检查,确定每个环片的位置信息,进而反向确定环片点云分割位置,完成隧道结构点云的逐环分割。
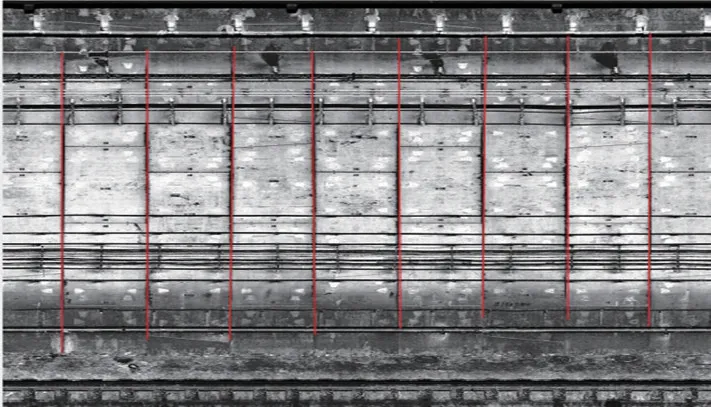
图4 环片拼接缝识别
通过单环点云计算该环片中心断面的位置,通过多次试验发现,激光扫描仪获取单帧点云(360°)约有5 000个点,每帧间隔约为2~3 mm,隧道内部存在电缆、支架、螺栓孔等,若以单帧点云进行断面分析,易存在较大误差。为保障提取的断面点云能更好地体现环片结构,经过多次试验发现,在环片中心断面位置两侧取宽度为10 cm的点云(约20万点)来分析该环片的断面结构状态,既能最大程度降低结构附属物干扰,又能提高计算效率。由于环片受力不均衡,且环片形变具有不确定性,运营期间环片断面已非标准设计断面,为了精确计算变形后断面的结构情况(长轴、短轴、水平距离),本文提出了随机抽样一致性(RANSAC)算法与最小二乘相结合的方法。其基本流程为:首先通过RANSAC算法将提取的包含“局外点”(噪点)的断面点云数据集,以迭代的方式估计最佳数学模型参数;再将集合中所有点云带入最佳数学模型,从而剔除误差较大的噪点[12-13];然后利用最小二乘法对去噪后的点云数据进行最小二乘拟合,进而得到与环片实际最佳吻合的断面点。将最佳点云带入椭圆的一般方程,即

由于断面点云不是一个严格标准的椭圆结构,因此将提取断面点云的坐标带入标准椭圆方程存在偏差。该偏差的计算公式为:

由式(3)计算得到椭圆方程的参数(A~E),再代入式(2)得到与该环片断面点云最佳近似椭圆一般方程,最后通过得到的椭圆一般方程参数计算得到椭圆圆心、椭圆长短半轴以及长轴与水平方向的夹角。
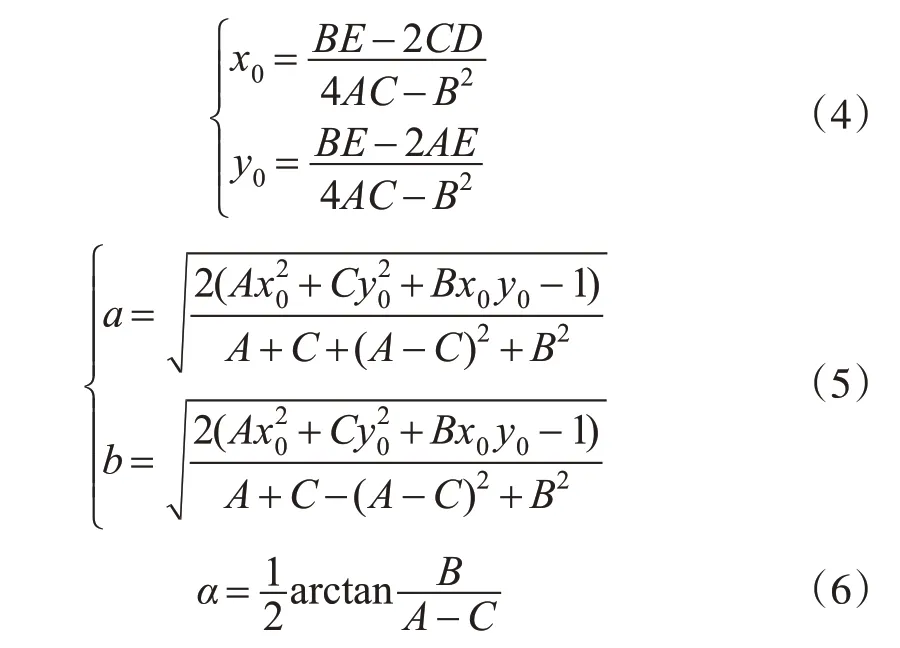
通过椭圆度公式(式(7)),可计算得到该断面的椭圆度,即为该环片的椭圆度。

根据得到的最佳近似椭圆的圆心坐标以及长轴与水平方向的夹角,通过计算机逐环提取圆心两侧断面点云的实际水平距离,以此作为该环片的水平收敛监测值,并与环片设计值进行对比,以监测环片结构的变化量,如图5所示。
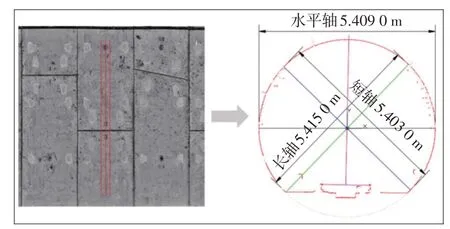
图5 收敛分析示意图
移动三维激光收敛监测技术点云获取速度快、精度高、点云密度大,断面提取效率高,通过单次扫描可快速实现逐环提取,并与隧道断面设计值进行比较,进而监测运营后隧道环片的几何形变情况。通过定期多频次监测可获取环片结构随运营时间的变化趋势,为地铁结构的长期运维提供数据服务。该技术弥补了传统单点收敛监测的不足,采用计算机自动化收敛分析将传统收敛监测由抽样监测转变为逐环普查,监测结果更加完善准确。
3 工程案例分析
为了验证该方法的可行性,本文以我国中部城市某地铁区间收敛监测项目为例,项目区间全部采用本文技术方法,快速实现隧道环片的逐环收敛监测。
3.1 工程概况
该工程项目为盾构法施工区间,盾构环设计外径为6.0 m,设计厚度为0.3 m,拼装成环后内径为5.4 m,环片宽度设计为1.5 m,左线区间起止里程为K6+986.872~K8+023.689,共692个环片,右线区间起止里程为K6+985.984~K8+023.645,共693个环片,长度共计约2.1 km。采用传统监测方式监测该区间需由多个作业组采用全站仪耗时3~4个作业天窗期才能完成,且抽样间隔为30环,每环12个观测点,监测效率底,监测成果存在大量盲区;而采用移动三维激光扫描技术对该区间进行水平收敛监测,仅一个作业天窗即可完成全部环片的数据采集,逐环水平收敛分析和成果分析输出需1.5 h,极大地提高了监测效率和成果数据的完整性。
3.2 成果与分析
根据项目要求,本文将监测水平收敛值与环片设计直径进行比较,收敛变化量分别以50 mm、70 mm、100 mm为参考值,得到各参考值之间的环片数量和区间占比,如图6所示。
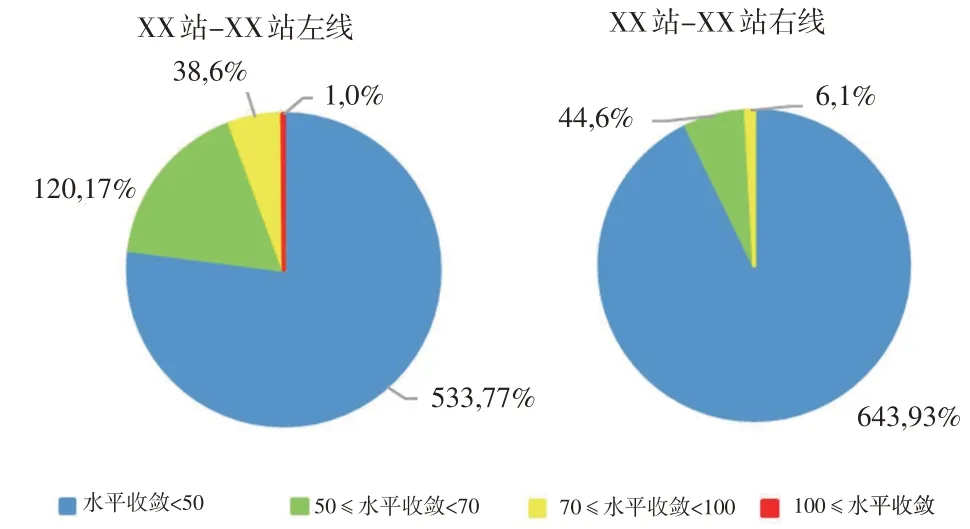
图6 水平收敛成果分布图
该区间环片标准设计内径为5.4 m,由监测成果可知,左线水平收敛变形有39环超过70 mm,超过5.47 m,如图7左线紫色标记位置所示,其中有1环收敛变形超过100 mm,超过5.5 m,为隧道出口第691环;右线水平收敛有6环超过70 mm,如图7右线紫色标记位置所示,但均在100 mm以内,该区间内大于70 mm环片成果如表1所示。由逐环收敛折线图可知,区间内收敛变形较大的区域主要集中在盾构隧道出口,区间右线收敛情况比左线好。
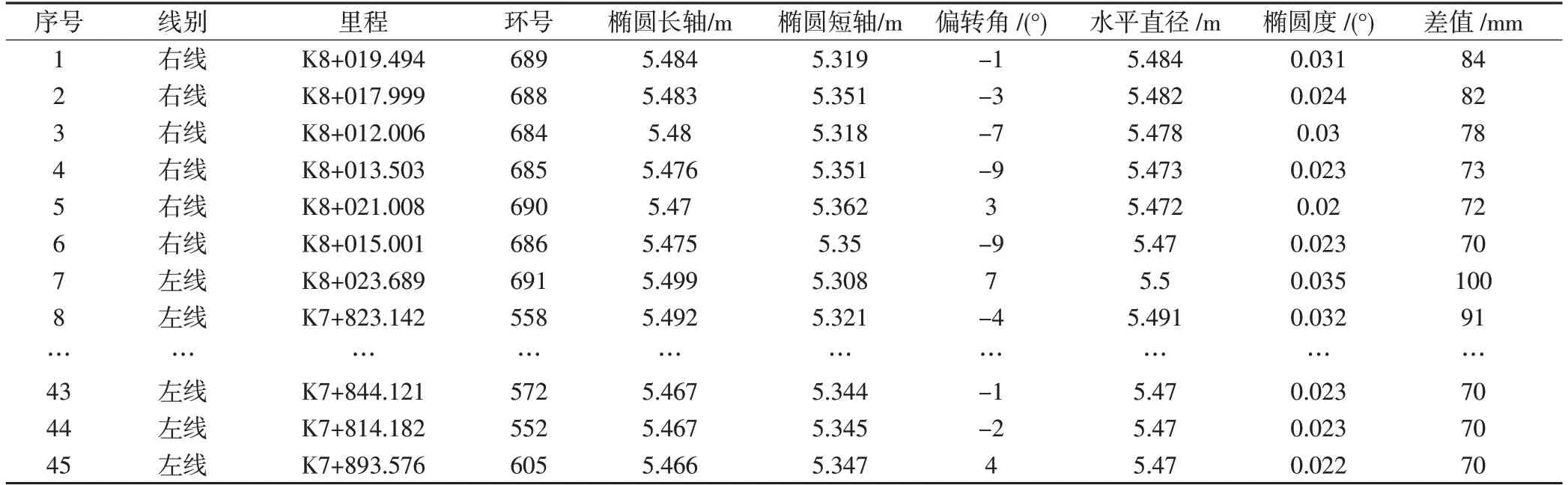
表1 水平收敛成果表
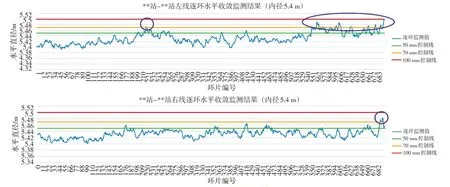
图7 逐环水平收敛监测成果
4 结语
隧道环片径向收敛监测是地铁运营安全监测的重要内容,是保障运营期结构安全一项重要的监测指标,但由于地铁线路长、环片数量多,传统监测过程复杂,导致以往水平收敛监测工作只能采用抽样监测的方式。移动三维激光扫描技术不仅监测速度快、内业处理自动化效率高、数据信息获取全面,而且弥补了传统水平收敛监测的不足,为地铁运营隧道结构安全提供了技术支撑,为管理部门的科学管理提供了依据。
