运行轨道自动化监测设计与分析
2022-11-26万永世王洪生田晓龙霍得啸
万永世,王洪生,田晓龙,霍得啸,范 剑
(1.天津市地球物理勘探中心,天津 300171)
对正式运营的轨道交通隧道结构进行监测时,进出场时间通常会受到较多限制,24 h内的有效工作时间较短,若采用传统人工监测的方式难以完成隧道内监测任务[1-3]。自动化监测能实时监测隧道结构变化,不仅节约了人力,而且免受进场时间的限制[4-6]。本文以苏州市轨道交通6号线的轨道保护监测项目为例,设计了该项目的工作方案,并对该轨道交通的运行区间进行长期监测,包括横向位移、纵向位移、竖向位移、净空收敛和差异沉降[7-10]。结合项目成果,本文分析了该轨道交通的安全性和稳定性,为及时判断既有线结构安全和运营安全状况提供了依据,为可能发生的事故提供了及时准确的预报,使有关各方有时间做出反应,避免恶性事故的发生,确保既有线路的安全运营。
1 工程概况
项目的监测对象为苏州市轨道交通6号线与既有3号线之间的李公堤西换乘站,车站长度为206.83 m,标准段宽度为23.10 m,站台宽度为14 m,有效站台中心里程处底板埋深约为27.4 m,车站顶板覆土约为2.90 m,换乘节点结构埋深约为27.50 m。监测前对车站环境进行评估发现,导致车站形变的主要因素为:
1)基坑出现降水、土体卸载产生基坑变形,重载车辆和材料堆载、隧道掘进等施工活动易对周边土体产生扰动;工程在坑内局部挖深较大部位施工时,可能进行局部降水产生影响。
2)水土流失易造成既有轨道交通结构车站变形、隧道管片开裂、渗漏水、隧道净空变化甚至隧道结构变形过大等病害,严重的还将导致轨道结构变形,对列车的运营产生威胁。
3)车站或区间施工开挖面上部有微承压水、下部有承压水影响,施工过程中若水控制不利,则易产生渗漏水,导致水土流失、周边土体变形,从而导致既有地铁结构的变形。
4)地层较软弱,变形敏感,基坑开挖时空效应明显;主体结构施工期加载,通过已建成的下部结构将应力传递至下部岩土体,使得周边岩土体应力重分布、周边土体变形,从而导致既有地铁结构的变形。
2 监测方案
2.1 基准点布设
车站、区间施工过程中轨道保护监测项目如表1所示。
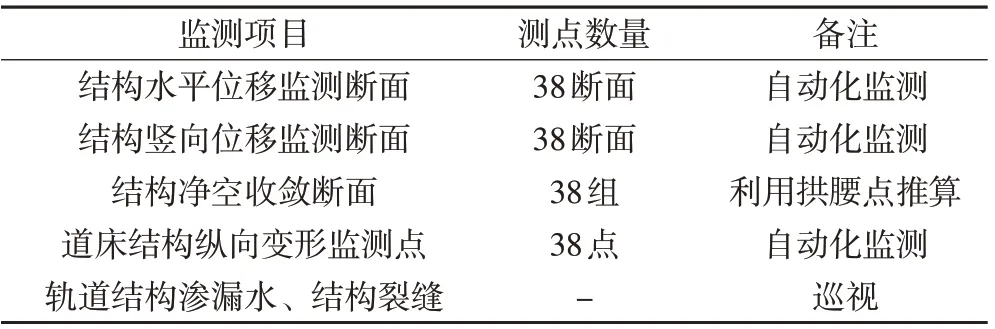
表1 监测项目及其监测点数量
在自动化监测的断面测量中,需布设基准点作为变形监测的起始依据,具体布设方案为:①基准点布设在项目变形区外30 m的稳定位置处,上下行线各布设两个基准点组;②每个基准点组包括6个L型小棱镜基准点,所有仪器、设备的安装位置均应满足行车限界要求;③隧道上行线、下行线每6 m布设一个断面,拱顶、拱腰两侧各布设一个点,道床布设两个点,每个断面共5个点;④车站、出入场线上行线、下行线每10 m布设一个断面,侧墙布设两个点,道床布设一个点,每个断面共3个点。各监测项目报警值如表2所示。

表2 地铁结构监测报警值
2.2 监测数据处理
1)水平位移观测时,观测点距离测站的最大距离D约为150 m,仪器的测角精度为0.5"。由于隧道中采用强制对中架设仪器,同时固定安装小棱镜,采用仪器固有的自动照准功能,因此观测误差主要来源于仪器的系统误差。利用TS50型全站仪观测最远点的点位中误差,仪器标称精度为方向观测精度±0.5",测距±0.6 mm+1×10-6D,则有:

观测的点位中误差为:

误差最大点的点位中误差为±0.96 mm,满足±3.0 mm的要求。在实际监测中,基于隧道内的观测条件和上述精度分析,采用徕卡TS50对隧道内的水平位移监测点观测两测回,距离正倒镜各观测一次,以满足精度要求。
2)竖向位移观测时,采用强制对中一站式测量高差的单点高差精度推算,测得的水平距离D=150 m,误差md=0.7 mm;垂直角a=15°,误差为0.5"。设边长观测值和角度观测值是独立观测值,列函数式h=D×tgα,对函数求全微分,利用协方差传播律求取两点间高差的方差。由于观测边长和观测角是相互独立的,因此其方差阵为:

计算得到中误差为0.72 mm,即150 m范围内,在不考虑球气差的影响下,精度小于1.0 mm。
3)净空收敛计算采用全站仪三维非接触轨道净空位移量测新技术。其基本原理是利用全站仪自由设站远距离测量点位不同时段的三维坐标,再将测量数据输入计算机通过软件进行后处理,每组断面提供5条弦距的次变形量和累积变形量。其计算公式为:

最后输出测点的三维位移矢量或测点相对收敛值。
3 监测数据成果与分析
监测数据共有67个点的横向、纵向、竖向累积变化值及其变化速率,16个点对的净空收敛累积值及其变化速率,15个点的差异沉降累积值及其变化速率。
本文首先分析67个点在3个方向上的累积变化情况,结果如图1所示,可以看出,横向位移均为负值,多数集中在-3~-2 mm之间,未超过表2中5 mm的预警值;纵向位移大多为正值,小于4 mm,少部分在-1~0 mm之间,未超过预警值;竖向位移绝大部分为正值,小于4 mm,未超过预警值。

图1 3个方向的累积位移值/mm
变化速率对比如图2所示,可以看出,横向和纵向变化较稳定,变化速率绝对值基本小于0.2 mm/d;竖向变化速率绝对值较大,在y296661和y296741两点分别为0.788 027 mm/d和0.749 891 mm/d,但也未超过表2中的报警值。

图2 变化速率对比图/(mm/d)
净空收敛累积值及其变化速率如图3所示,可以看出,净空收敛的点对中,没有超过预警值的点,竖向变化速率较大的y296661所在点对累积值为-0.54 mm,变化速率为-0.32 mm/d,y296741所在点对累积值为-0.56 mm,变化速率为-0.44 mm/d,均在合理区间内。
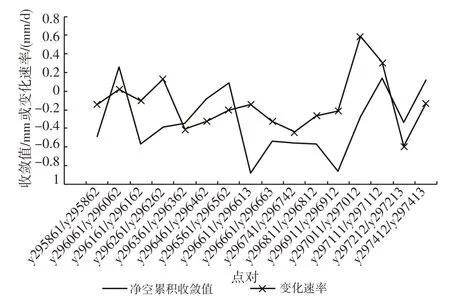
图3 净空收敛累积值及其变化速率
差异沉降累积值及其变化速率如图4所示,可以看出,差异沉降存在两组逼近预警值的点对,y297215/y297315的累积沉降值为1.87 mm,y297315/y297415的累积沉降值为-1.85 mm。

图4 差异沉降累积值及其变化速率
在上述监测数据中,较明显的沉降点为y296661、y296741、y297215、y297315、y297415,前两个为顶部监测点,后3个为道床监测点,无侧墙监测点,说明该轨道侧墙稳定性较好;道床监测点虽接近预警值,但距离控制值10 mm相差较大,且其变化速率未超过预警值,因此对这些较大的沉降值可不予考虑。
4 结语
本文设计了苏州城市轨道换乘站的监测方案,利用自动化监测方案进行结构和道床监测,获取了横向、纵向、竖向位移,计算了净空收敛值和差异沉降值。结果表明,该设计方案符合工程项目需要,顺利获取了大量隧道内部监测点的变化值,未受轨道持续运行影响;净空收敛与差异沉降的计算值在误差范围内,变化速率未超过控制值;该换乘站所有监测和计算成果均未超限,其安全性较好。
