全站仪视线测量方式在工程测量中的应用研究
2022-11-23宋子东福建船政交通职业学院土木工程学院福州350007
宋子东(福建船政交通职业学院土木工程学院,福州 350007)
0 引言
在测量人员无法到达的一些测量点位,常用的平面定位测量方法有测角交会法、测边交会或边角交会法等,这些观测方法均应在目标点上设置测量标志。在进行一些空间工程施工测量时,如悬索桥索股安装及垂度调整,通常采用全站仪三角高程测量方法,必须悬挂专业棱镜于索股特定的位置进行监测[1],或要求观测人员进入一些危险的施工地段等。这些方法无法做到像现代GNSS+测深仪器+微机司服一体化的水上测量一样,在安全的观测点进行一站式测量[2]。全站仪高程测量方法中有悬高观测程序测量[3],通过视线与铅垂线的交会计算求得视线交会点的高差。这种视线测量方法在军事领域也有着广泛的应用,如军用头盔显示器技术中利用的根据头部转动的方位与倾角,通过各种传感器和微机处理,直接显示目标敌情或引导导弹攻击的测量技术[4]。工程测量中在那些人员无法到达的点位、工地上的危险地带、险要的工程勘察断面,可利用全站仪自由设站测量的优点[5],在一个测站上完成观测或运用放样一站式视线测量方法及观测精度进行分析研究。
1 视准轴视线交会测量
1.1 视线交会测量
通过特定2点建立铅垂面(称V面)或3点建立斜面(称S面)为测量参考面,在自由设站的情景下进行视线交会测量,当视准轴视线左右或上下移动时,仪器屏幕即时显示视线与参考面交会点的相对偏距或高差的坐标值。
1.2 点至V铅垂面交会测量
通过特定2点建立铅垂参考面与视线交会测量如图1所示。从自由设站点P0,直接观测特定2点,并输入点P1(x1,y1,h1),P2(x2,y2,h2)的坐标,建立以P1为基点、过P1P2基线的铅垂面为铅垂参考面V。过P1在V铅垂面的基线有两种情况:第1种是以P1点为相对坐标原点,以水平线P1Q基线为相对坐标轴,此时转动望远镜,十字丝交点在V参考面的交会点M的相对坐标(a,b)即显示在屏幕上。如图1中为简化交会计算,假定P0-P1-Q是过P1的水平面,先通过全站仪测定特定点建立的空间参考测量模型,可观测得l1,l2,β1为各个量。视线P0M在V铅垂面投点为M,相对平距、高差为(a,b),计算式见式(1)。
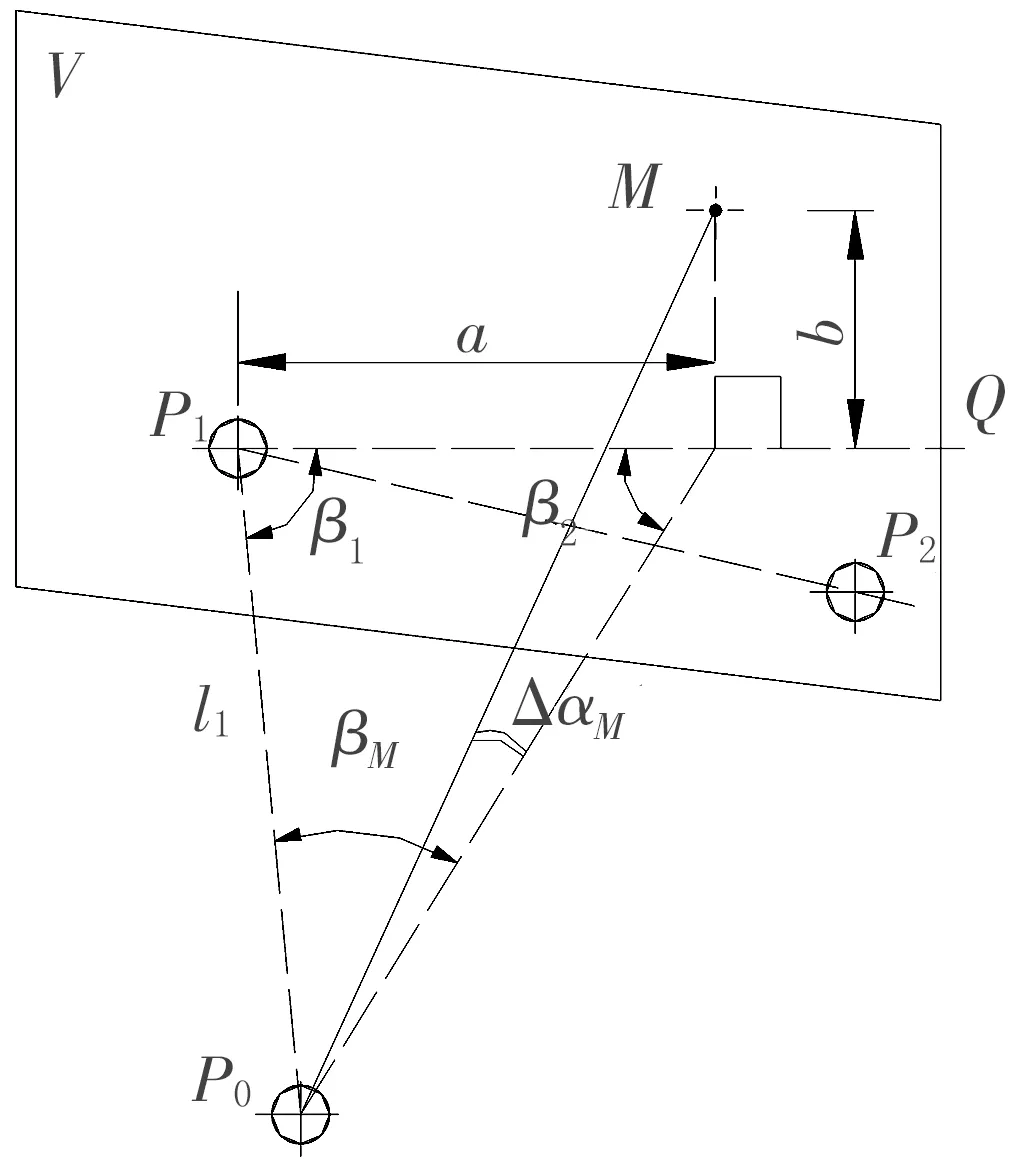
图1 V参考面交会测量
(1)
式中:βM为水平投影线与基线P0P1水平角;ΔαM为视线与P0P1Q点的相对竖直角增量;l1为视线P0M在水平面的投影平距。以式(1)中:βM,ΔαM随着视线移动而变化,对应的(a,b)值也随着变化。
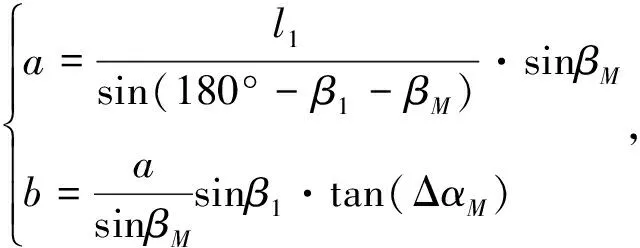
第2种见图2所示,在V面内以P1点为相对坐标原点,P1P2连线是斜线为相对坐标轴。此时转动望远镜,交会点M的相对坐标值为(a,b)即时显示在屏幕上,其计算式见式(2)。
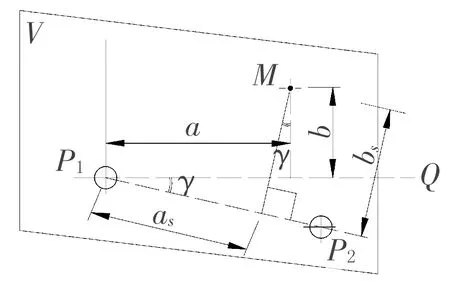
图2 以空间斜基线P1P2为基线
则有:
(2)
式中:a,b为式(1)计算值;γ为水平线P1Q与斜线P1P2的铅垂面夹角;d12为P1P2的水平平距。若全站仪在已知点上建站测量,由已知点P1的坐标,方向基线P1P2的方位角αP1P2,可计算并显示交会点M的绝对坐标(xM,yM)。
1.3 点到S斜面交会测量
如图3所示,过3个特定点P1(x1,y1,h1),P2(x2,y2,h2),P3(x3,y3,h3)测量并建立参考斜面S,从自由设站点P0,视线与参考面S确定参考面交会点M相对斜基线P1P2的位置值(a,b)。
图3 S斜参考面的视线交会
视线在斜面上交会点的位置是通过空间交会计算获得的,要通过多次转换,计算较为复杂,在此不做详述。
2 视准轴视线交会测量在工程上应用
2.1 V铅垂面与视线交会测量工程应用
2.1.1V铅垂面水平基线测量工程案例
案例1:在水上测量应用如图4所示,为水上地物测量,先在岸边或施工影响范围外设定参考点P1、P2,使点P1、P2与观测点在同一直线上,在适合观测的点自由设站,观测点P1、P2并建立V铅垂参考面,望远镜视准轴照准测点A、B,分别测得相对于P1的A(aA,bA)及B(aB,bB),也间接测得A、B两点的相对平距与高差。这种情况也适用于远处监测点的沉降观测或地面点的碎部测量。
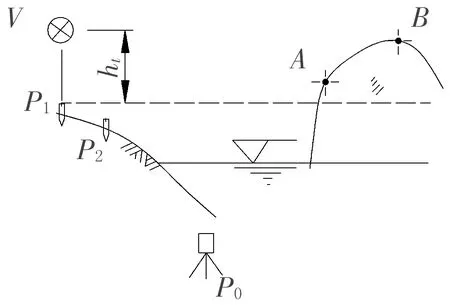
图4 在水上测量中的应用
案例2:对深基坑及高边坡断面测量的应用如图5所示。为了在现场能准确点确定点P1、P2同断面线,可以在P2点放置一台激光铅垂仪用来标定断面线,同案例1,在合适点架仪后,分别用视线照准断面的变坡点1、2、3、4、5,记录并计算相邻点的相对平距与高差。
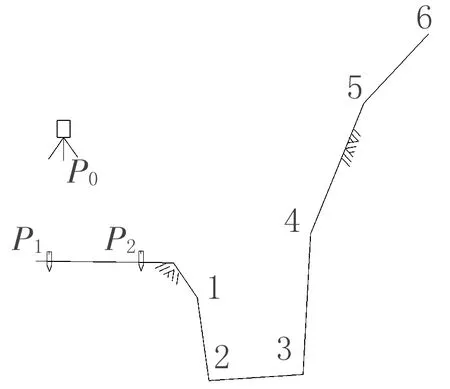
图5 在深基坑和高边坡中的应用
(3)
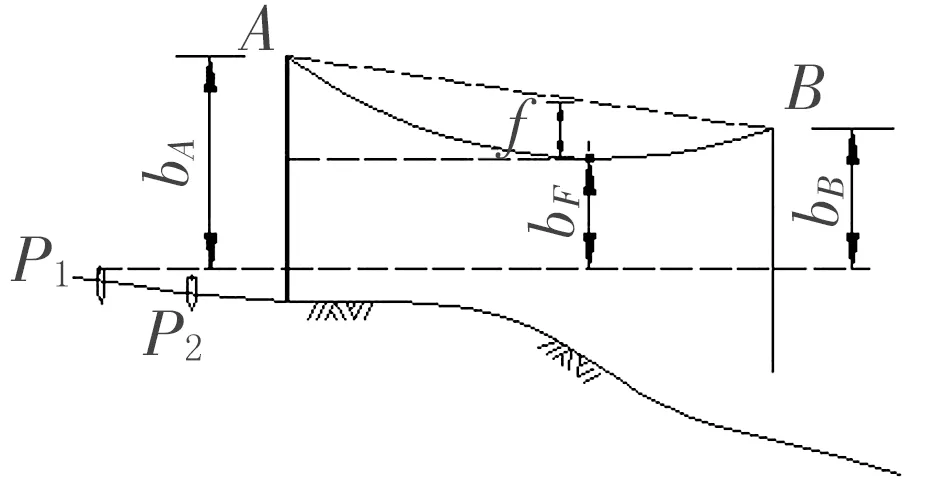
图6 在电力线弧垂测量中的应用
若用激光免棱镜直接观测选定的点P1、P2并建立参考面进行视线测量。可在已建的建筑物同一面上建立参考面并测定同面相关点的数据。
2.1.2S斜面视线测量工程应用
按图3所示,S为某已建倾斜坡面,采用免棱镜照准激光观测同一斜面上特定点的点P1、P2、P3,此时视线照准同坡面点,可进行定位或检测。
3 参考面视线测量误差分析
参考面的参数由特定点观测建立,观测基点的精度直接影响基准面精度。全站仪视线测量为单程观测,主要运用由水平面建立的测量模型,要考虑用水平面代替水准面的限度,转动望远镜时水平角与竖直角的变化量βM和ΔαM是由全站仪自动采集的,其误差mβM,mΔαM对相对坐标的影响可不计。以式(1)为例,令β2=180°-β1-βM,测点中误差计算式简化为式(4):
(4)

假定在参考面正面中央合适距离内架仪,以β1=45°,βM=50°为最佳观测点,分析计算视线交会误差ma、mb,计算见表1及表2。
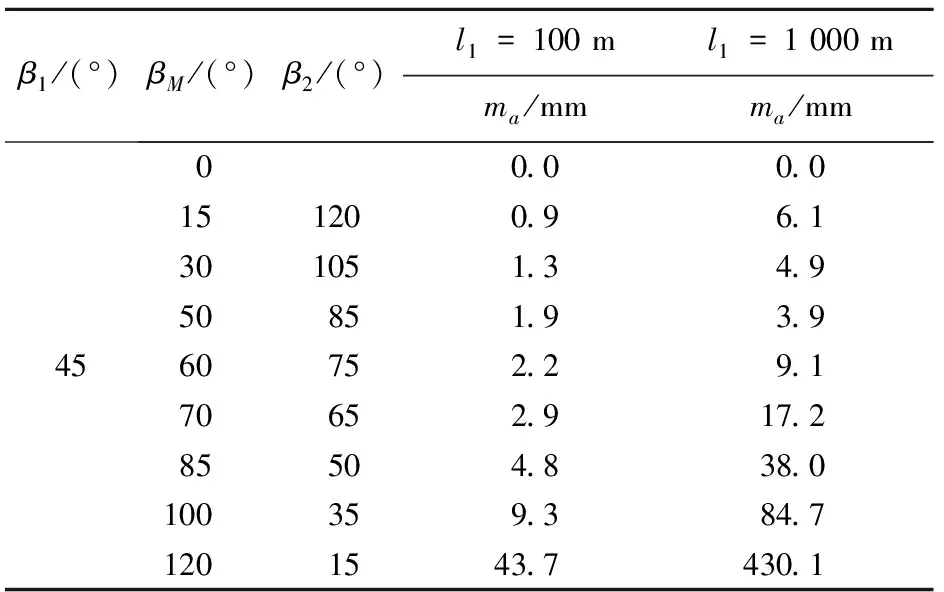
表1 ma值计算表
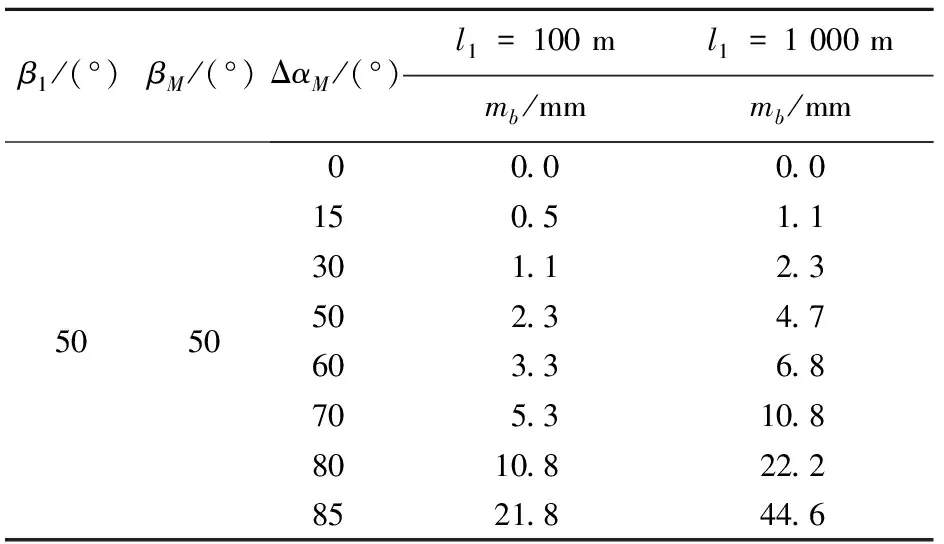
表2 mb值计算表
从视线交会点中误差计算表可见,在正中适当位置视距在1 km以内架仪,水平相对中误差控制在±10 mm以内时,水平交会角βM的变化应在60°以内为宜。竖直相对误差控制在±10 mm以内时,竖直角ΔαM应在±60°之间为宜。视线测量时交会点的误差主要由建立参考面的准确度确定,参考面准确度直接影响观测值的精确性,为确保交会点落在参考面上,一是要提高P1、P2定位点的精度;二是可在定位点设置激光铅垂仪辅助定线,在实地打出V面的铅垂线。此分析结果是在理想工况下进行的,实际操作时应根据工地条件选择合适的架仪点和观测面的视距,若架仪点不理想时,标准应适当放低。
4 结论
随着现代工程测量技术的不断发展,光、电、磁、信息网络技术、无人机测绘、三维激光扫描及卫星定位技术在测绘领域被广泛应用,测量方法与手段也被不断更新。通过建立测量参考面,利用视准轴视线测量的方法,在视距1 km以内,水平角及竖直角转动范围控制在60°,竖直角转动范围控制在±60°之间时,可以在自由设站的情况下,一站式确定视点的相对位置,可以解决一些特殊情况下的工程测量问题,若把视线测量通过测量程序功能模块固定在仪器中,能为工程的测量技术人员提供一种实用、快速、简便的视线测量方法。
