平面连杆机构教学设计中的若干问题
2022-11-22吴晨杰何学军胡杰华郭晓君
吴晨杰 何学军 胡杰华 郭晓君
(中国人民解放军海军勤务学院,天津 300450)
“机械基础”作为军事后勤类各专业的专业基础课,主要包括常用机构、常用机械传动、联接、轴系零部件、机械装置润滑等内容。“平面连杆机构”是本课程中常用机构的重要内容之一,也是学员所接触到的第一种典型的平面机构,具有特殊而重要的地位。若学员能够很好地理解并掌握平面连杆机构的相关知识,不仅对平面连杆机构的合理设计意义非凡,亦有助于学习理解后续其他常用机构。
然而在教学实施过程中,常常出现让学员感到困惑难以理解的几个问题:课程教学内容战味不足,新课引入时的案例主要有内燃机、牛头刨床、飞机起落架、颚式破碎机等通用机械,不贴近部队工作实际;在课堂教学中直接给出结论“平面连杆机构基本形式是铰链四杆机构”,无法将其与前面所学知识密切联系,在自主思维下建立此认识;针对铰链四杆机构三种基本类型的运动转换特点,结合实际应用需求展示各类机构具有代表性的应用实例时,机械传动本质易被外形掩盖无法快速识别;教材中对铰链四杆机构的曲柄存在条件推导不全面,常常忽略几何条件取等号的情况;直接给出铰链四杆机构基本类型的判别方法,违背认知过程;对平面连杆机构急回特性和死点位置的解释缺乏运动和受力分析过程,难以理解曲柄与连杆两次共线时摇杆位于极限位置。
基于此,本文选取海军后勤专业实例引入平面连杆机构,基于构建主义学习理论思考运动副到四杆机构可实现的运动转换,“骨骼化”铰链四杆机构实例,全面论证曲柄存在条件,系统论证铰链四杆机构基本类型判别方法的“得出过程”,采用分步动画分析机构运动和受力情况,继而引出极位夹角、传动角、死点等概念。
1 问题导入式教学法实例的选取
2 铰链四杆机构的引入
根据平面连杆机构的定义和低副的分类,平面连杆机构可分为带有移动副的平面连杆机构和转动副组成的平面铰链机构,其中带有移动副的平面连杆机构可以看作是由平面铰链机构演化而来,因此平面连杆机构的基本形式为平面铰链机构。
更进一步,结合已掌握的知识(运动副),从二杆机构这种已熟练掌握的机构组成形式开始,采用同一种运动副逐步递增构件,结合动画和模型,主动思考从二杆机构到四杆机构可实现的运动转换,判断各构件数下的平面连杆机构能否满足工程上的需要,最终得出平面铰链机构的基本形式为铰链四杆机构。依据构建主义学习理论,学员充分发挥主观能动性,用探究、讨论等不同方法在头脑中主动构建新的知识点,提升借助原有知识解决新问题的能力。
3 铰链四杆机构的基本类型
首先,曲柄摇杆机构、双曲柄和双摇杆机构都单独对应一个完整的动画,使学员能够直观地理解每类机构的运动转换效果。重点讲述:同一个铰链四杆机构,在基本尺寸和运动副形式不变的情况下,采用不同的构件做机架,就会变化出三类不同的机构。
其次,采用动画演示各类机构的应用实例,包括舰艇雷达、汽车雨刷器、和面机、滑脂注入器等曲柄摇杆机构,码头抢修车坐斗升降机构、车门启闭机构等双曲柄机构,港口起重机、飞机起落架、油船软管吊等双摇杆机构。虽然随处可见平面连杆机构,但其结构和工作特性往往被装置的外形掩盖,不容易被识别出来,尤其是对刚开始接触该类机构的学员排平,更是很难建立清晰的联系。因此,需要将军事实例“骨骼化”,即去掉外形,采用剖分、透视化的方法,或以原理性结构的方式呈现出来。在教员引导性、启发性提问,并由学员主动思考、积极回答各实例工作原理的基础上,进一步组织分组的头脑风暴活动,通过合作培养创新性思维和举一反三的学习能力,学员自由列举三种基本类型的更多军事实例,与教员引导点评相结合,能活跃课堂气氛,充分体现学员的主体地位,培养学员细心观察、勤于思考的科学素养。
4 曲柄存在条件
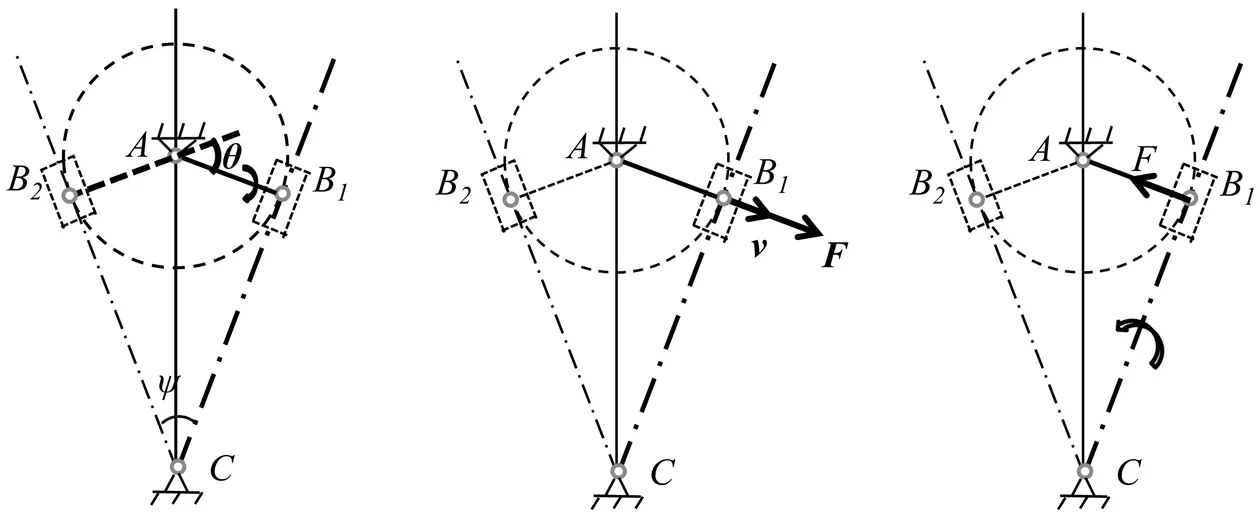
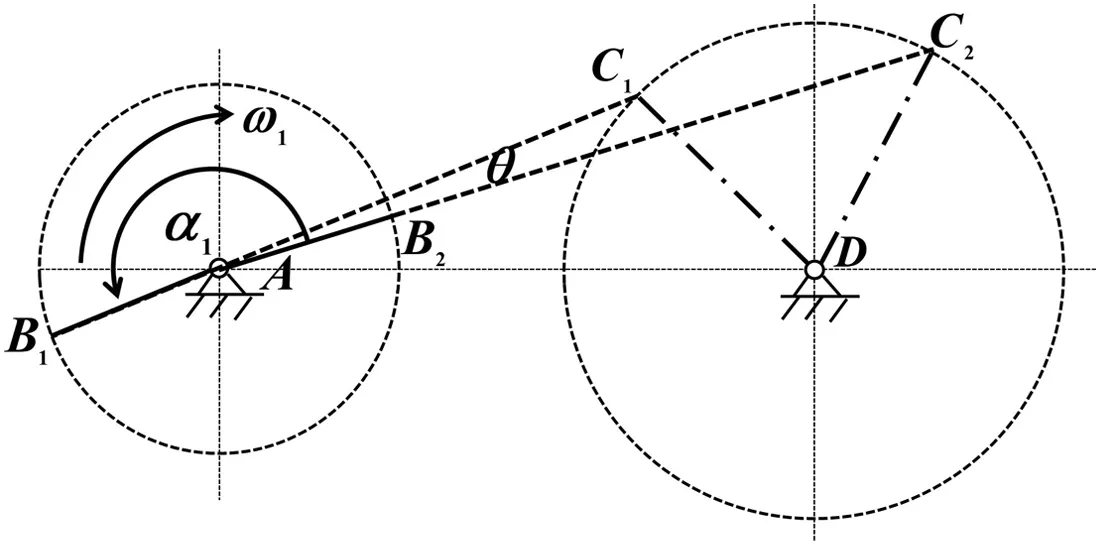
机械基础教材中关于曲柄存在条件的推导,通常借助曲柄摇杆机构运动过程中曲柄与机架两次共线位置得到几何关系。此外,还可以采用如下方法:在曲柄摇杆机构中,当曲柄做整周转动时,曲柄与连杆重叠共线和拉直共线时摇杆分别位于左右极限位置。如图1所示,曲柄AB、连杆BC、摇杆CD、机架AD的长度分别为a、b、c、d,根据三角形两边之和必大于第三边的定理,当曲柄与连杆拉直共线时a+b 图1 曲柄存在条件推导 传统教学对四杆位于同一直线时的特殊情况一笔带过甚至忽略,因此充分考虑四杆位于同一直线时的极端情况,如图2所示,此时不等式条件变为等式。前两个图显示,当杆AB与杆BC重叠共线时,杆CD与杆AD也成重叠共线,这时不等式变为等式,分别得到几何关系b+c=d+a和d-a+b=c;图3显示,当杆AB与杆BC拉长共线时,杆CD与杆AD也成拉长共线,这时几何条件满足d+c=b+a。考虑到更一般的情形,得到铰链四杆机构曲柄存在的最短杆条件和杆长和条件。这里可引入课程思政,即满足构件长度和条件,机构中才可能出现曲柄,否则只能形成双摇杆机构,就像我们做人必须要有一定的原则,否则就容易被外界左右,摇摆不定,就像一个双摇杆。 图2 四杆位于同一直线的极限情况 形成三种类型机构的直观印象后,通过引导学员观察三类机构的几何特点,将观察到的现象归纳成结论性的条件,得出铰链四杆机构基本类型的判别方法,以判别铰链四杆机构基本类型。 由图1可以看出,混交度的分布频率随着混交等级的增高而增大。从表1可以看出,全林分的平均混交度是0.7676,属强度混交向极强混交过渡状态,其中极强混交占48.4%,强度混交占24.4%,两者合计占72.8%,处于零度混交和弱度混交的林木相对较少,两者之和约10%,说明整体林分处于高度混交状态。 除此方法外,还可以采用如下方法:低副运动可逆性指出,以低副相连接的两构件之间的相对运动关系,不会因取其中哪一个构件为机架而改变。在图1所示曲柄摇杆机构中,通过研究其运动规律,可以发现AB相对AD做整周转动,AB相对BC也做整周转动;而BC相对CD做相对摆动,CD相对AD也做相对摆动。利用低副运动可逆性(即构件长度不变则构件之间相对运动关系不变),A、B两处的铰链可以做整周转动,C、D两处的铰链只能作摆动。若取杆AB为机架,则相邻两杆BC、AD相对于杆AB仍做整周转动,故可以得到双曲柄机构;若取杆件BC为机架,杆AB相对杆BC、AD仍做整周转动,杆CD相对BC、AD仍做摆动,故得到曲柄摇杆机构;若取构件CD为机架,则得到双摇杆机构,进而可以归纳出判断铰链四杆机构的准则。 为加深学员对铰链四杆机构装配及运动特性的了解,利用FZ-01型机构创新组合设计实验台,从大量长度不等的杆件、连接转轴、隔套等组件中选取合适的设计组件,以满足铰链四杆机构的判别准则,实现曲柄摇杆机构、双曲柄机构及双摇杆机构的组装,加深对铰链四杆机构组成原理的理解,实现知识运用、能力锻造和创新培育相统一。注意,在铰链四杆机构实验中,铅垂的活塞杆可沿X轴左右移动,靠六角头螺钉和蝶形螺母固定,活塞杆上的滑块可沿Z轴上下移动,主动轴上的齿轮不需要拆卸,可用直尺测量各杆件和机架的距离以保持杆件在同一平面,杆件之间需要安装隔套以减少磨损。 如图3所示,以“骨骼化”的牛头刨床摆动导杆机构为例,利用生动、丰富的动画和视频,以感性认识和理论推导相结合的方式,串联起急回特性、传动角、死点等知识,促进学员理解平面连杆机构的工作特性。 图3 平面连杆机构工作特性 首先以引导的方式让学员观察牛头刨床中摆动导杆机构的摇杆往复摆动速度上的差别。根据现象提出急回特性,让学员积极主动地明确该知识点,而不是被动告知式的接受。提醒学员注意导杆机构是由铰链四杆机构演化出来,将其注意力引导到铰链四杆机构上来,从一般的基本形式讲解急回特性。 然后配合动画以提问的形式引导学员思考曲柄匀速转动时摇杆的两个极限位置,发现连杆与曲柄重叠共线和拉长共线时摇杆正好摆动到左右两个极限位置,从而引出极位夹角这一重要参数(如图4所示),为行程速比系数推导和急回特性分析做铺垫。 图4 曲柄摇杆机构急回特性分析 接着,以分解动画为主,分析摇杆在左右两个极限位置往复摆动时曲柄转过角度的差别,再辅以板书推导,重点开展铰链四杆机构的急回特性分析及行程速比系数公式推导。板书内容体现主要线索,使学员对内容逻辑关系有总体的认识和把握,同时利用板书的灵活性,通过书写和擦除,有利于公式的理论推导。期间引入思政元素,引发学员思考,应如何合理高效地利用时间,不虚度光阴,不断向自己的梦想靠近。 最后,将注意力回到摆动导杆机构,摆杆处于极限位置时原动件所处的两个位置所夹锐角为θ,容易得到极位夹角θ和摆杆摆ψ相等,因此摆动导杆机构具有急回特性。 为拓展课堂内容,将学科前沿知识融入教学,选取仿生学科中的四足步行机器人[2]作为课后思考题,要求分组学员思考单自由度四足机器人腿部机构是如何设计并利用急回特性的,引导学员将所学知识从设计的角度回归到实际应用中。之后查阅资料搜集腿部结构形式属于四连杆机构的四足步行机器人产品,并对美国波士顿动力公司研制的猎豹机器人、大狗机器人、领头狗机器人等四足机器人进行性能解析,形成全程考核、评价反馈,在学习讨论中拓展思维,在自主实践中形成能力、激发创新。 为避免给出错误的解释,根据铰链四杆机构压力角的定义分析牛头刨床机构的传动角。当曲柄为主动件时,滑块等效于连杆,原动件通过连杆传递给从动件的力就是曲柄通过滑块传递给导杆的力,属于正压力垂直于导杆;力作用点的速度为导杆上压力作用点的速度,导杆做圆周摆动因而速度垂直于导杆。因此导杆位于极限位置时,摆杆受力方向和速度方向始终一致,它的压力角为0°,传动角为90°,说明此时机构传力性能最好。 对于死点特性的引入,首先提醒学员注意铰链四杆机构的原动件不一定非得是曲柄,摇杆同样可以作为原动件带动曲柄运动,进而提出如下设想:若将原动件调换成摇杆,是否同样可以带动曲柄做整周的转动?学员形成思考后,配合分解动画,从已具备的受力分析知识入手,分析摇杆带动曲柄运动的力传递过程,如图5所示。 图5 曲柄摇杆机构死点分析 摇杆往左摆动时,摇杆通过连杆给曲柄的作用力F沿连杆的方向斜向下,F可被分解为沿圆周速度方向的有效分力Fr和指向回转中心的法向力Fn,曲柄是由连接点处沿速度方向的有效分力Fr驱动的。当摇杆摆到左侧极限位置时,曲柄与连杆重合共线,传动角γ=0°,此时不论用多大的力推动摇杆,曲柄都会卡死在此点,这个位置称作“死点”,可借助外力渡过。之后摇杆开始往右摆动,又会产生Fr=0的有效分力,推动曲柄开始转动。当摇杆摆动到右侧极限位置时,曲柄与连杆再次共线,又出现了γ=0°、Fr=0,曲柄卡死。最后归纳结论:当摇杆作为原动件时,曲柄与连杆两次重合共线位置处驱动曲柄的有效分力均为0,此时不论连杆给曲柄的推力有多大,都无法驱动曲柄而卡死在死点位置。 随后提出死点好还是不好的问题,根据学员的回答从正反两方面入手解答,并用连续设问的方式激发学员主动思考,进而利用实际案例对设问作出回应。期间让学员从四杆机构死点的规避和利用中理解事物的两面性,教育学员学会辩证地看待世界上的各类事物,缺点如果规避和利用得当可以转化为优点,从而引领价值观提升。 回到摆动导杆机构的死点问题上,当摆杆作为原动件且处于极限位置时,通过滑块作用于曲柄上的力沿着曲柄方向,与曲柄圆周速度方向垂直,此时摆动导杆机构压力角为90°,传动角γ=0°,存在死点位置。 为加强学员对知识的掌握,通过习题练习,使知识点得以在课堂上消化[3]。本节内容对应的习题包括简答、画图题和计算题。例如,画出不同四杆机构的压力角,飞机起落架如何利用死点位置获得可靠的工作状态?已知牛头刨床的行程速比系数和机架长度,曲柄长度是多少?铰链四杆机构中的三根杆长度a、b、c不变,取第4根杆为机架,要想获得曲柄摇杆机构,d的取值范围为多少?这些问题无不与铰链四杆机构基本类型的判别、平面连杆机构的工作特性息息相关,通过练习加深对本节课内容的理解,提高教学质量和教学效果。 平面连杆机构是“机械基础”课程中常用机构的重要内容之一,整体可浓缩成一句话:1种基本形式,3个组成部分,3种划分类型,3个工作特性。运用学习迁移的教育心理学规律构建知识点结构图,可明确知识的连贯性与延续性,理清知识点脉络,再采用思维导图将完整的知识结构表示出来,能够深化理解、强化记忆,并培养学员前后联系、总结关系的思维习惯。本节课共有7个不同层次的知识点,利用板书可清晰呈现各知识点之间的联系,围绕其教学设计需要注意以下几个方面的问题: (1)平面连杆机构在军事武器装备中有着广泛的应用,引入学员熟悉的军事装备实例有助于激发其学习兴趣。 (2)基于构建主义学习理论,结合已掌握的知识(运动副),通过分析各构件数下平面连杆机构的运动转换逐步引入铰链四杆机构,在自主思维下建立“平面连杆机构的基本形式就是铰链四杆机构”的认识,从而在头脑中主动构建新知识点,并体会知识发现的过程。 (3)注意铰链四杆机构应用实例的动画演示需经过“骨骼化”,既保持原有机构的运动传递本质,又能被快速直观地识别出来,激发学员讨论兴趣。 (4)关于曲柄存在条件的推导应该做到深入且严谨,充分考虑四杆位于同一直线时取等号的情况。 (5)铰链四杆机构基本类型的判别有两种论证方法,了解低副运动可逆性有助于加深学员对铰链四杆机构本质的理解认识。 (6)平面连杆机构工作特性分析过程中,采用分步动画配以板书推导的方法有助于理顺知识难点,体现主要线索和知识点的逻辑关系,培养学员自主发现问题、解决问题的能力,为知识点的再创造和再利用打下基础。

5 铰链四杆机构基本类型的判别
6 平面连杆机构的工作特性
6.1 急回特性
6.2 传动角
6.3 死点

7 结语
