弹簧赋能腓肠肌的下肢肌肉生物力学分析①
2022-11-22李世凌吴豪豪颜兵兵帅俊峰
李世凌, 吴豪豪, 颜兵兵, 张 鑫, 帅俊峰,*
(1. 佳木斯大学机械工程学院,黑龙江 佳木斯 154007; 2. 佳木斯大学第一附属医院,黑龙江 佳木斯 154007)
0 引 言
人口老龄化是制约社会发展和民众高质量生活的重要因素,其给社会和家庭都带来了严重的经济负担。为增强老年人的运动能力,提高其生活自理能力,减轻社会和家庭的经济负担,研究人员期望通过设计研发助力外骨骼机器人以实现这一目标。助力外骨骼机器人的设计研发需要获取人体的运动规律及相关生理学数据,其中肌肉的运动状态的获取是研究的关键。因此,如何准确的获取人体下肢的生物力学状态决定了助力外骨骼机器人的发展进程。然而,由于人体生物系统的复杂性、外界环境的干扰以及伦理等的限制,现有的数据采集方式难以较好地获取下肢肌肉受力情况[1]。
Reinbolt[2]通过对人体肌肉骨骼模型进行运动分析和仿真,发现了运动姿势、地面反作用力和肌肉力之间的内在联系,并基于此分析了如何减少患者肌肉损伤的风险。詹晓彤[2]运用OpenSim软件定义并构建人体肌肉骨骼模型,研究外界环境的扰动选择性对人体运动平衡的影响。孙雯雯[3]利用OpenSim软件进行仿真分析人体下肢运动学和动力学计算过程,研究肌肉协同问题。
OpenSim是Stanford University开发的一个开源软件交流学习平台,其主要功能是利用计算机模拟人体肌肉骨骼系统的运动过程,采用人体骨骼模型采用JavaScript编程语言建立,基于肌肉形态及解剖学参数建立人体肌肉模型。通过肌肉伸缩带动关节运动,模拟人体运动,并输出关节运动状态、肌肉活性、肌肉肌腱拉伸变化等生理参数[4]。本文基于OpenSim软件的生物力学仿真计算分析模型,提出通过增强腓肠肌进行下肢运动仿真,在腓肠肌处设计一个双路径被动弹簧,期望达到赋能增强腓肠肌的作用,并利用肌肉计算工具(CMC)对人体下肢肌肉进行静态优化分析,获取下肢运动状态,为后续助力外骨骼设计提供基础。
1 人体肌肉骨骼模型搭建
根据GB10000-88标准[5],定义模型高度及重量(h=1.75m,m=75kg),研究对象选取OpenSim软件中的模型Gait10dof18musc,并对其身体各尺寸与质量参数进行修改,实际身体下肢尺寸如表1所示。该模型共有13个实体骨骼,12个主要运动关节以及18个肌肉-肌腱单位。
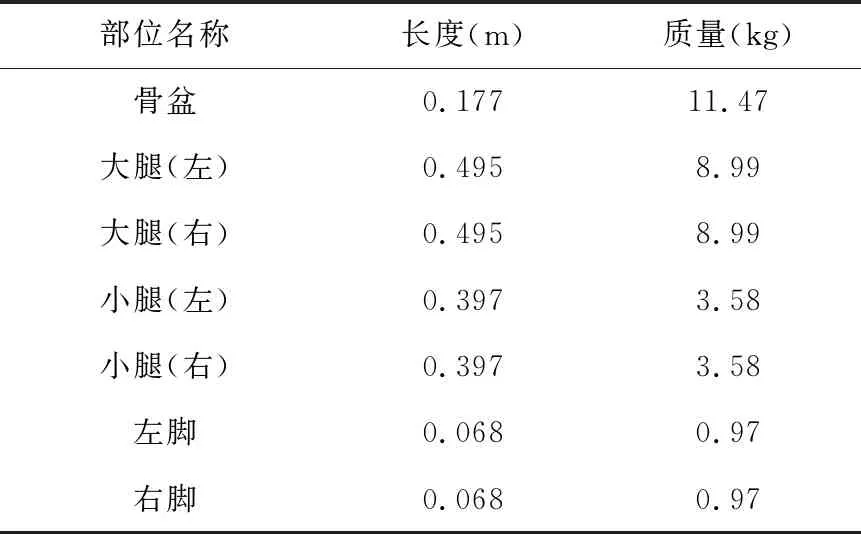
表1 人体下肢尺寸与质量
Gait10dof18musc模型包括上肢和下肢,本文研究针对下肢运动,下肢骨骼连接方式包括球窝连接和铰链连接。其中,股骨和骨盆通过球窝相连;踝关节、距下关节和跖趾关节通过铰链相连。下肢各关节面角度会随着运动而变化,但主要是矢状面关节角度变化对人体运动过程研究影响较大,水平面和冠状面内的关节角度变化影响可以忽略。因此在下肢运动分析过程中只考虑运动在矢状面的变化,忽略冠状面和水平面的影响[6]。肌肉骨骼模型如图1所示。
2 人体肌肉骨骼模型与双路径弹簧耦合
类似于肌肉的定义方法,采用几何路径(沿着股骨和脚末端之间的路径)创建一个被动双路径弹簧,其中弹簧静态长度为0.4m、刚度为10000N/m和耗散因数为0.01,用以增强腓肠肌肌肉,参数设置如图2所示。
3 行走过程中下肢肌肉生物力学分析
3.1 肌肉力计算工具CMC原理
模拟期间在指定的时间间隔下,CMC工具计算肌肉激发水平,将动态肌肉骨骼模型的广度坐标(例如关节角度)推向所需的运动轨迹。CMC通过使用比例衍生(PD)控制和静态优化的组合来达到此水平[7]。肌肉控制计算过程如图3所示。
CMC算法首先需要计算获取一组模型加速度,其将模型坐标朝向实验衍生的坐标移动,利用PD控制法计算所需的加速度;其次是计算获取肌肉执行器控制所需的加速度。大多数时候,执行器驱动通过由肌肉激发实现。任何类型的执行器都可以与CMC一起使用。静态优化用于将负载分布在协同执行器上,被称为"静态"优化,因为性能标准(即成本指数)仅限于在模拟过程中随时可以计算的数量。最后进行标准的正向动态仿真并重复上述步骤。CMC完成执行后,需要将计算出的肌肉激发模式与原型或测量的肌电图测量值进行比较,验证模拟结果的正确性。
3.2 赋能前后肌肉力变化
人体站立、行走和慢跑等保持身体平衡的运动是依靠小腿部分的腓肠肌、比目鱼肌和胫骨前肌之间的相互调节作用来实现[8]。因此,通过增强腓肠肌,对比增强前后小腿部分肌肉力及肌肉代谢的变化,用以描述助力效果。
从图4可以看出,通过赋能弹簧增强腓肠肌,可以有效降低腓肠肌的肌肉力,从而减少腓肠肌的代谢消耗。比目鱼肌的肌肉力略有降低,胫骨前肌的肌肉力明显上升。结合人体步态分析及肌肉力变化可以推断,支撑期内胫骨前肌肌肉力上升,弹簧储能;进入摆动期后腓肠肌作用,弹簧释放弹力,腓肠肌和比目鱼肌的肌肉力有所下降。
3.3 赋能前后肌肉代谢变化
肌肉整体代谢量过程变化如图5(a)所示,可以看出,通过弹簧增强腓肠肌,在支撑初期内总体代谢有所下降,后续时刻肌肉代谢均处于上升阶段,由此表明单独增强腓肠肌在一定阶段可以达到助力效果,但由于下肢肌肉之间的相互作用,通过弹簧给腓肠肌赋能可能会引起相关肌肉的消耗上升,从而导致下肢整体代谢上升,如图5(b)所示。
4 结 论
通过弹簧增强肌肉提供助力是切实可行的,但考虑到运动过程中肌肉间的相互作用的影响,可能会导致整体代谢消耗上升的问题,因此,借助弹簧助力外骨骼机器人设计时需采用离合器控制,在适当时刻利用离合器将弹簧与人体相离合,实现能量的储存与释放;而离合的控制则可以根据不同行走阶段对肌肉助力的需求设定,并依据上述肌肉仿真结果实现离合状态的切换。
