关于无人机“低慢小”飞行器侦测反制系统的技术比较分析
2022-11-18刘卓李路兰天陈良
刘 卓 李 路 兰 天 陈 良
(长沙市公安局科技与信息化支队,湖南 长沙 410000)
0 引言
当前国内民用无人机市场规模处于快速增长期,截至2021年末无人机实名登记数量已达到83.02万架,同比增长58.6%。但在从业规模扩张、产业结构升级的同时,“低慢小”无人机存在的失控、“黑飞”、恶意侦察、引导攻击等主要威胁形式,也为机场跑道、监狱、人流量大的公共区域以及军事基地等场景带来严重安全隐患。研究“低慢小”无人机的侦测技术方法,从中选择探测性能、应用场景及市场前景综合较优的侦测技术,并将其应用于反制系统设计与实现环节,对完成“低慢小”无人机反制任务、实现精准打击具有显著现实意义。因此研究该项课题具有十分重要的意义。
1 “低慢小”飞行器探测难点
低空、慢速、小目标无人机(简称为“低慢小”)包括飞行高度、飞行时速、雷达反射面积、巡航范围和重量等性能参数,其中飞行高度要求小于1000 m,飞行速度控制在200 km/h以内,雷达反射面积小于2 ㎡[1]。考虑无人机的空机/起飞重量、飞行时速、巡航范围以及机翼平面参数等不同指标之间存在一定的正相关性,选取大疆-晓Spark、大疆-精灵Phantom4ProV2.0、测图鹰X100、大疆-御Mavic Air、测图鹰X6、大疆-悟INSPIRE2等无人机进行性能参数比较分析,拟将该文研究的“低慢小”无人机关键指标设计为起飞重量<25 kg,飞行高度<500 m,飞行速度<180 km/h[2]。但在“低慢小”无人机的探测技术应用环节,由于在低空空域飞行常面临噪声、地形地物遮挡和信号衰减等干扰因素,在低速飞行或悬停状态下影响雷达测速与光电跟踪效果,加之体积较小、部分采用非金属材料制成,因此会导致探测的声、光信号较为微弱,进一步增加了无人机探测难度。
2 无人机反制与侦测关键技术
2.1 反制技术
2.1.1 压制式无线电干扰
压制式反制技术利用无线电对进入区域内的非法无人机的上行遥控链路、下行遥测信息传输链路以及GPS信号进行压制干扰,使无人机仅能在较短时间内维持原始姿态,无法沿操控路线灵活运动。我国工信部规定的无人机数据链频段为845 MHz、1.4 GHz,而“低慢小”属于消费级无人机,适用频段为2.4 GHz、5.8 GHz以及915 MHz,并基于GPS、GLONASS和BD这3种体制进行卫星导航芯片的选型,通过增强无线电压制信号强度,使频率覆盖至所有频点,起到压制效果[3]。以遥测信息传输链路为例,将大功率干扰信号发送至无人机工作频段,增加接收设备端的噪声电平,降低信噪比至捕获跟踪门限以下,借此GPS接收机的跟踪环路阻断无人机与控制端的通信传输链路,借此触发预设的自动保护机制,使无人机自主返航或降落。
2.1.2 欺骗式反制系统
欺骗式反制技术由数据链欺骗、卫星导航信号欺骗组成。以卫星导航信号欺骗形式为例,采用通用电路结构进行干扰信号源设计,基于RS-232协议进行串口通信,基带信号模块利用FPGA芯片输出具有不同带宽、干扰样式的信号,并由频综电路、调制电路与放大电路构成射频信号模块,生成频率为400 MHz~6 GHz的射频干扰信号。鉴于“低慢小”无人机属民用无人机,其卫星导航信号的导航电文公开,因此可采用生成式欺骗方式进行无人机导航信号的覆盖干扰,具体实现方式如图1所示。将该系统应用于干扰测试环节,观察导航欺骗干扰效果可以发现,目标无人机无法根据卫星导航信号修正机身位置与运动轨迹,难以在一段时间内保持稳定悬停,并且在欺骗干扰技术影响下触发强制降落机制,实现对非法无人机的有效反制。
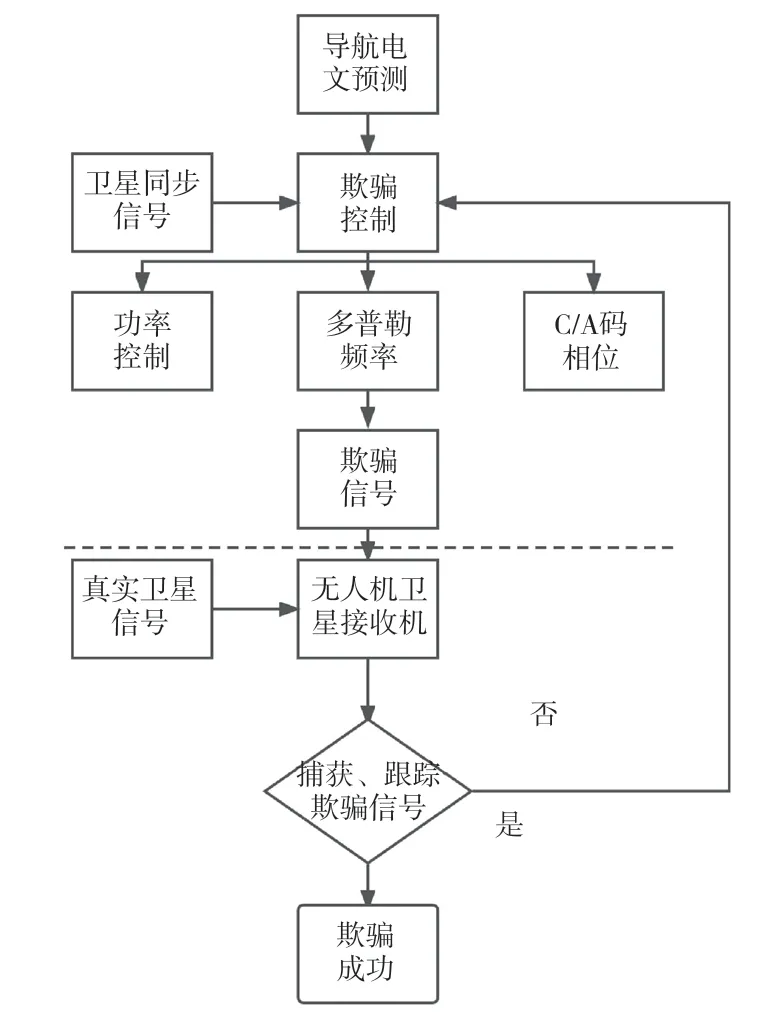
图1 基于导航信号欺骗无人机的实现方式
2.1.3 KU05雷达系统
这里所说的雷达系统,其所处的工作频率是KU波段,具有诸多方面的优点,主要包括灵敏性强、安装和拆卸便捷、系统便于携带、操作简单和具有非常强的机动性。其体制为全固态、全相参脉冲多普照勒体制。和普通的雷达系统相比,该系统攻克了发现低、小、慢目标难度大的技术难题。该雷达对低、小、慢警戒雷达方案进行了运用,其俯仰上、下倾角可达15°,可实现360°扫描,能够在极短的时间内对无人机速度、距离和方位等信息进行上报。其具体参数见表1。

表1 KU05雷达系统
2.2 侦测技术
2.2.1 主动式雷达探测技术
现阶段多种新型雷达技术普及,以相控阵雷达、多普勒雷达为代表的雷达技术及装置被广泛应用于无人机、无人驾驶领域以及安防行业中。将雷达探测技术应用于无人机侦测环节,主要适用于在建筑密度较大场景下解决反射、电磁干扰等问题,并基于相应算法进行干扰元素的剔除,获取目标信号的准确检测及运算结果,如距离、径向速度等参数。
将雷达探测技术应用于非法无人机侦测时,需要合理选择雷达体制、调节信号频率以及开发关键算法等,具体来说可围绕以下5个方面进行合理选型:1) 脉冲多普勒雷达,该雷达在信号处理方式上较为便捷,但存在一定的近距盲区,且分辨率较低,因此可选用线性调频连续波雷达作为替代。该雷达体积较小、距离分辨率高,可适应城市场景中非法无人机的探测距离条件,具备更优使用效果。2)在雷达中添加动目标显示算法,可有效减轻回波干扰,但不适用于对悬停状态下的无人机或飞行速度过低的无人机进行检测,存在较高漏检率。3)相控阵雷达的更新速率与分辨率均较高,适用于多目标追踪,但功率消耗相对较大。4)X波段雷达能够满足长距离探测要求,但精度相对较差,因此常采用Ku波段雷达进行替代,能够减轻地面干扰,提高探测精度,以20 GHz频率进行目标精准探测,配合地杂波MTI抑制技术的应用,满足无人机探测需求。5)三坐标雷达能够获取目标无人机的X、Y、Z三坐标信息,实现对目标无人机的精确定位与打击。此外,还需要配合杂波抑制技术的应用,如引入Hough变换算法来减小回波信息的衰减值,有效抑制杂波,提高目标探测精度。
2.2.2 被动式频谱分析技术
被动式侦测主要指侦测设备仅接收“低慢小”无人机发出的信号,设备自身不发出电磁信号,可分为2种类型:1)辐射频谱。利用侦测设备接收无人机地面操作人员发出的无线电信号,经信号分析、调用后台数据库进行比对后,生成符合指定无人机特征的信号,由此确认具体的无人机型号,并控制干扰器发出干扰信号,实现侦测与反制。2)散射频谱。以宽带接收机为核心设备,从中选择相对较强的信号幅值确认为目标无人机发出的信号,可有效屏蔽外部ISM频段干扰,且适用于长距离探测,但对电视信号的依赖度较高。其他侦测方法包括光电探测、声学探测和无线电探测等,需要结合无人机型号、性能参数与使用场景等情况进行技术选择及应用[4]。
将上述探测技术方法进行比较,围绕以下2个层面进行分析:从技术层面入手,以探测距离、应用场景作为衡量技术方法适用价值的关键指标。市场上现有产品的理论探测距离最高可达15 km,但整合仿真分析与现场实测结果可知,实际探测距离控制在3 km~5 km,无线电探测产品在市区范围内的有效探测距离不足1 km,红外系统的最大探测距离约为3.6 km,声探测系统的探测距离控制在200 m~500 m,且气候条件、地物环境、电磁干扰等因素分别影响不同探测技术的使用范围,对多传感器、多技术融合应用提出了现实要求;从实际应用层面入手,以有无信号源、安装方式作为核心指标,合理选择有源或无源探测技术方法,在复杂场景下需要采取有源+无源探测技术,并根据地面固定、移动等不同安装方式进行雷达及相应装置的选型优化,并兼顾算法实现等因素,保证有效提升探测性能。
3 无人机自动反制系统技术组合及选型优化
3.1 技术组合方案
为最大限度扩大无人机反制系统的适用场景,需要针对自动侦测、反制技术进行科学组合及优化,基于侦测、报警和处置等流程的自动化运行需求进行应用系统的设计与开发,如将雷达、频谱探测技术进行组合,当探测设备发现目标后立即启动声光报警模块,提示值班员执行具体操作,并调用热备份中的天线对准目标,启动干扰装置发出信号,利用数据链欺骗、卫星导航信号欺骗方式对非法无人机施加干扰,使其离开保护区域后下降或直接坠毁;或增设光学摄像机,由值班员进行目标确认及判断,启用干扰压制模块对目标无人机施加干扰。以拦截非法无人机为目标进行技术组合与系统设计,在探测跟踪技术方案设计上,将雷达探测技术与光电探测技术进行有机整合,具体设计与实现步骤如下:
首先,根据四旋翼无人机飞行原理,将4个电机提供的总升力设为U1,以机体坐标系Y轴方向为基准产生的电机升力差为U2,以机体坐标系X轴方向为基准产生的电机升力差为U3,4 个电机的总扭矩记为U4,由此建立跟踪控制器结构框图(如图2所示),并整合多次无人机飞行寻优控制器参数,基于Mavlink通信协议进行控制参数的在线调节。

图2 跟踪控制器结构框图
其次,获取目标无人机在原飞行坐标系下的飞行速度、航向角和俯仰角3项关键参数,以指控中心为原点建立站心直角坐标系,以坐标系为基准进行无人机飞行轨迹建模(各飞行阶段的飞行参数模拟结果见表2)。
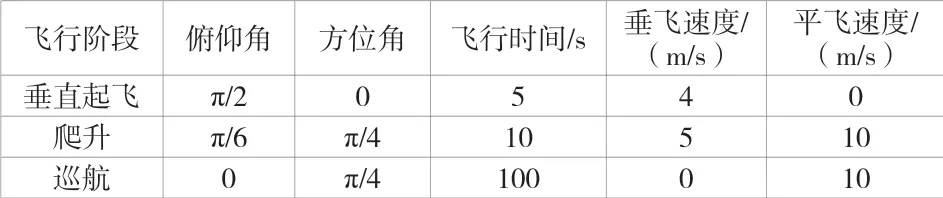
表2 模拟飞行参数
再次进行探测设备拦截无人机位置的解算(见表3),将预测目标无人机的拦截位置以GPS格式、经Mavlink协议发送至反制设备端,将预测拦截点位的相对位置参数设定为极径R、仰角Ω、方位角Φ,以指控中心原点为基准,建立雷达球坐标系,根据获取的GPS坐标值(B1,L1,H1)转换为大地直角坐标(X1,Y1,Z1),经坐标系转换、平移后获得预估拦截位置的大地直角坐标值(X2,Y2,Z2),并基于近似直接法获得预测目标拦截位置的GPS坐标值(B2,L2,H2)。
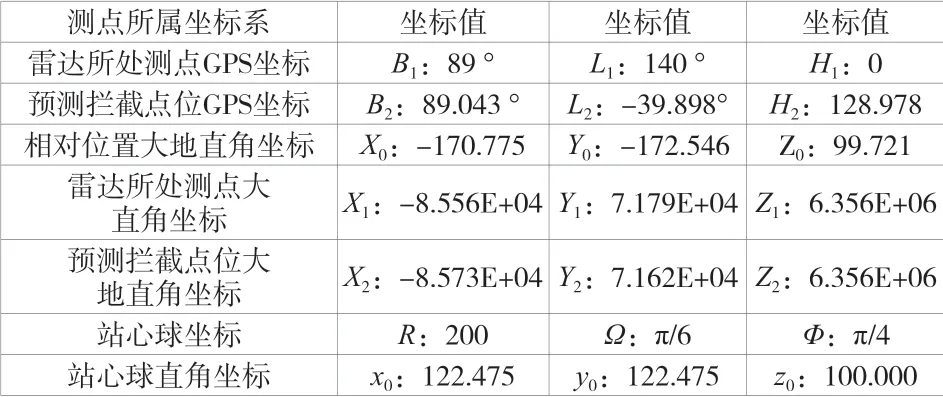
表3 不同测量点位的坐标值计算结果
从次,进行反制策略设计,由视觉导引、飞行控制、动力装置、通讯系统及地面站组成反制无人机系统,基于目标图像搜索、识别、跟踪和控制等流程,最终获取飞行寻优控制器参数,实现对反制设备参数的动态调整。
最后,在仿真测试环节,根据目标无人机的飞行航迹生成不同场景下目标检测结果(见表4),测得反制无人机的目标正确率平均值达到0.96%、单帧检测时长为8 ms,能够有效跟踪非法无人机飞行,实现反制目标。

表4 不同场景下目标检测结果
3.2 技术选型优化结果
该文通过将光电反制技术、雷达探测技术进行组合,完成无人机自动反制系统设计与开发方案的编制,整合理论分析与实际测试结果,可归结出以下技术优势:1) 和传统电磁干扰等反制手段相比,应用无人机设备反制无人机的技术方案时更为简洁高效、节约成本,为低空近程反制“低慢小”提供可靠借鉴思路,并实现跟踪效率、跟踪精度的显著优化,保障反制无人机跟踪目标飞行过程的稳定性。2) 基于先跟踪、后识别的技术路线虽然一定程度上削弱了系统响应时间,但考虑“低慢小”无人机自身运动速度受限,因此该系统能够在以后满足低速、悬停等作业情况下的跟踪与反制要求。3)依托反制策略的精细化设计,有助于降低系统虚警率和漏检率,提高反制无人机防御系统的实际应用性能。
4 结论
该文通过整合现有关于“低慢小”无人机的侦测与反制技术研究成果,结合指定场景建立了一种反制无人机防御系统,整体设计方案简洁、技术实现难度低,且适用于非法无人机的近空低程反制处理,可有效防御非法无人机飞行带来的安全威胁,为同类无人机反制与侦测系统的研发及应用提供良好示范经验。
