一种船舶电力推进系统十五相电机矢量控制方法
2022-11-17隗宇,桂栋
隗 宇, 桂 栋
(上海船舶运输科学研究所有限公司 舰船自动化系统事业部,上海 200135)
0 引 言
船舶电力推进技术是通过电机带动推进器运行的技术,相比传统的通过热机直接驱动推进器运行的技术,具有操纵性、机动性、安全性、经济性和排放性好,以及设备安装布置灵活、易于获得理想的拖动曲线、响应速度快和原动机选型灵活等优点,近年来得到了广泛应用[1-2]。
受常用电网制式的影响,目前船舶的电力推进系统主要采用的是三相电力推进系统。相比三相电机,十五相电机的相数较多,不仅在性能上具有明显的优势,而且能实现一些三相电机不能实现的功能,这主要是由于十五相电机的特殊结构给其带来了更多的控制自由度和设计自由度。船舶十五相电机电力推进系统具有低速稳定性好、效率高、转矩密度高、容错运行能力强和可靠性高等优点[3-4],通过变频器脉冲宽度调制(Pulse Width Modulation,PWM)技术向其中注入特定次数的谐波,可进一步提升其转矩密度。
随着船舶对电机的单机容量的需求越来越大,三相电机的不足越发明显,而在相同的电压和电流等级下,采用十五相电机能得到更大的单机容量。目前,在有关十五相电机控制的研究中,大多结合十五相电机的结构和工作原理,对三相电机控制方法进行转换应用,很少基于船舶电力推进的特点和十五相电机的优势,对其低速稳定性和分组运行控制效果进行研究。本文以十五相电机为研究对象,以逆变过程为研究重点(将整流部分简化为直流电源),结合十五相电机电力推进系统架构,建立十五相电机矢量控制方法仿真模型,并通过试验对其在4种典型工况下的运行效果进行验证。
1 电力推进系统架构
船舶电力推进系统的控制过程是通过对逆变器进行输出调制,实现对电机运行的控制,电机运行带动螺旋桨旋转,由此产生推力,而逆变器是整个系统控制的核心。本文所述简化的电力推进系统主要由十五相电机、逆变器和螺旋桨等组成,其总体架构见图1。该系统的主要参数:逆变器直流端输入电压为DC 4 000 V;PWM之后输出的基波电压为AC 2 500 V,输出的电流为700 A;额定转速为200 r/min;额定容量为26.25 MVA。

图1 简化的十五相电机电力推进系统总体架构
1.1 电机模型
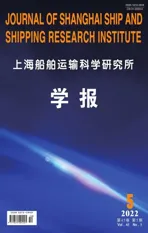
十五相异步电机的定子绕组由3组五相绕组构成,3组绕组的中点相互隔离,能增强电机的可靠性和定子绕组的独立性。十五相电机定子和转子结构分布见图2。在3组绕组中,每组绕组相差12°电角度,每组绕组的五相绕组间相差72°电角度[5]。
a)定子绕组轴线示意图
当电机在较低的工况下运行时,可选择控制电机和逆变器1组五相运行,2组十相运行。当某相绕组出现故障时:可隔离该绕组所在故障相的整个组的五相绕组,使电机作为十相电机继续运行;也可改变剩余相绕组中电流的相位关系,以产生圆形磁势,使电机在降工况下继续运行。[3]
定子电压方程为
Us=Rsis+pΨs=Rsis+p(Lssis+Lsrir)
(1)
转子电压方程为
Ur=Rrir+pΨr=Rrir+p(Lrrir+Lrsis)
(2)
式(1)和式(2)中:p为微分算子;Ur为转子电压向量;Us为定子电压向量;is为定子电流向量;ir为转子电流向量;Ψs为定子磁链向量;Ψr为转子磁链向量;Rr为转子电阻矩阵;Rs为定子电阻矩阵;Lrr为转子自感矩阵;Lss为定子自感矩阵;Lrs和Lsr为互感矩阵。
根据电机能量方程得出电机转矩公式为
(3)
式(3)中:θr为转子转动角度;I为电流组合向量;L为电感组合向量;Ir和Is分别为转子电流向量和定子电流向量;np为电机极对数。
根据运动学原理,电机转矩平衡方程式的一般形式为
(4)
式(4)中:Te为电机转矩;TL为负载转矩;J为电机及其负载的转动惯量;F为摩擦因数;k为扭转弹性力系数。
以上为十五相电机基本数学模型,通常可采用Park变换、Clark变换和多相坐标变换等基本的坐标系变换理论,遵循Kron的功率不变性原则,考虑到作任何线性变换都不改变系统的物理本质,将十五相电机转化为两相静止坐标系和同步旋转坐标下的数学模型,并进行逆变换,保证体现十五相电机的重要特性,准确表达各种性能参数。两相静止坐标系下的方程可表示为
(5)
(6)
Te=npM(isβirα-isαirβ)=np(isβΨsα-isαΨsβ)
(7)
式(5)~式(7)中:Ψ为磁链;u为电压;M为互感;L为电感;ω为角速度;i为电流;下标s为定子;下标r为转子;α和β分别为αβ坐标系中的α轴和β轴。
若取同步旋转坐标轴的实轴与转子磁链方向重合,同步角速度与转子的旋转速度相同,表示为MT坐标系下的方程,有
(8)
(9)
Te=npM(isTirM-isMirT)=np(isTΨsM-isMΨsT)
(10)
式(8)~式(10)中:下标M和T分别为MT旋转坐标系中的M轴和T轴。
1.2 逆变器结构模型
逆变器由3组(1、2、3)五相(A、B、C、D、E)绕组组成,共15个单元,每个单元都采用H桥形式。H桥包含2个桥臂,每个桥臂上有4个绝缘栅双极型晶体管(Insulated Gate Bipolar Transistor,IGBT)、2个箝位二极管和4个反向恢复二极管。每个H桥有2个接线端子,这样可分别接上电动机1个绕组的2个端子,形成一一对应的关系。这种接线方式的优点是不存在电机接线的中性点,各H桥与绕组之间的电气结构独立,通过电磁关系联系起来。若有1个结构发生故障,从电气接线的角度看不存在影响。由于系统采用的是十五相电机和逆变器,可将逆变器结构分成3组,每组五相,每组可通过独立的直流电源供电,自带独立的控制器,通过通信系统联系协调工作,这样能增强系统的可靠性。逆变器拓扑结构见图3。

图3 逆变器拓扑结构
1.3 螺旋桨模型
当前船舶采用的推进器以螺旋桨为主,根据船舶原理中的相关理论,得到一种简易的螺旋桨负载模型见图4。

图4 一种简易的螺旋桨负载模型
由于在仿真过程中只需知道螺旋桨的负载转矩,且本文关注的是电机的控制效果,因此可对螺旋桨负载模型进行适当的简化。从图4中可看出,螺旋桨的负载转矩近似与船舶航速的平方成正比,因此可近似认为推进电机的负载转矩与转速的平方成正比,即
M=Kn2
(11)
式(11)中:K为比例系数,即螺旋桨负载系数,可根据经验值选取;n为转速。
2 矢量控制实现
2.1 矢量控制基本原理
对十五相异步电机进行矢量控制的目的是改善其转矩控制性能,同时兼顾减小谐波,提高调制比,降低对系统的冲击等,因此最终实施仍要落实到对定子电流的控制上。矢量控制的思路来源于直流电机控制,希望通过解耦实现对类似于直流电机控制的励磁电流和转矩电流的表达,得到实质上一样但形式上不同的数学表达式。然而,这些直流给定量在实际系统中是不存在的,必须经过逆变换过程进行还原,将这些直流给定量变换成基于实际系统的交流给定量,在多相定子坐标系中对交流给定量进行实时控制,使实际值尽可能地接近给定值[7]。
具体而言,先选定一个参考方向(通常选某一旋转磁场方向),再将同步旋转坐标系的d轴(直轴)固定在该磁场方向,称其为M轴,与其相对应的q轴(交轴)称为T轴。将定子十五相电流分解为M轴上的分量isM和T轴上的分量isT,二者分别为定子电流在同步旋转坐标系中的励磁电流分量和转矩电流分量,能使异步电动机具有与直流电动机等效的调速控制方式。在进行实时控制时,将isM和isT作为控制信号,通过等效变换,可得到等效的定子十五相电流[8],基本原理见图5。

图5 矢量控制基本原理图
2.2 矢量控制实现方法
转子磁场定向矢量控制以转子磁场方向的矢量为旋转磁场参考方向,根据式(8)~式(10),需满足
ΨrT=0;pΨrT=0;ΨrM=Ψr
(12)

(13)
usM=p(LsisM+MirM)-ωr(LsisT+MirT)+RsisM=
(14)
(15)
从式(13)中的第3个公式中可看出,转子磁链是由定子的励磁电流分量isM单独产生的,与定子的转矩电流isT无关;从式(13)中的第4个公式中可看出,当转子磁链不变时,电磁转矩由定子的转矩电流分量isT产生,电磁转矩与isT成正比关系,与定子的励磁电流分量无关。这种控制方式根据转子磁场方向的异步电机矢量控制,可实现磁通和转矩电流完全解耦。
十五相电机的矢量控制系统是一个多环节的耦合复杂的控制系统,需采用PI(Proportional Integral)调节器对磁通、转速、转矩和电流进行辅助调节,根据式(4)、式(13)、式(14)和式(15)推导,转子磁链采用连续的闭环控制,在补偿直轴耦合分量的基础上,直接控制转子磁链的变化率。在进行转速控制时,需采用至少3环结构,其中:内环为定子电流转矩分量控制,实现对转矩电流的快速跟随,用于补偿直轴分量和旋转分量;第二环为转矩闭环控制,用于抑制转矩扰动的影响;外环为转速环,综合调节和控制各相参数。[7-8]最终该矢量控制系统由磁通调节、直轴电流调节、转矩调节、交轴电流调节和转速调节等5个调节器组成,通过组合形成的十五相电机按转子磁链矢量控制原理见图6。

图6 十五相电机按转子磁链矢量控制原理
具体实现如下:
1)将转子磁链的偏差送入磁链调节器得到给定的直轴电流,将直轴电流的偏差送入直轴电流调节器得到直轴分量并补偿旋转电势、感应电势和耦合电势,由此即可得到直轴给定电压。
2)将转速偏差送入转速调节器得到转矩给定值,将转矩偏差送入转矩调节器得到交轴电压给定值,同时稳定系统,减小磁链变化的影响,减小负载变化的影响;将交轴电流的偏差送入交轴电流调节器得到交轴分量,同时补偿旋转电势和直轴耦合分量等,得到交轴电压给定值。
3)通过矢量控制器的作用得到直轴和交轴的给定电压,根据转子位置角度,通过Park变换得到静止坐标系下的横轴和纵轴分量。根据多相静止坐标系与两相静止坐标系之间的转化规律,将其变换到十五相坐标系中,得到各相的电压,通过逆变器进行PWM,得到需给定的十五相电机的各相电压,仿真模型见图7。

图7 十五相电机按转子磁链矢量控制仿真模型
以十五相电机矢量控制系统原理和特征为基础,从转矩控制效果出发,通过多调节器组合控制实现解耦和补偿,通过分别控制直轴电流和交轴电流对磁链和转矩进行解耦控制,实现对定子磁链和转矩的既分开又整合的连续控制。这种控制方法的优点在于:根据系统的参数对调节器的参数配置进行调整,对耦合分量进行补偿,具有更好的适应性;能克服矢量控制对转子电阻等参数的直接依赖性;采用连续的控制方法,能减小转矩脉动。
3 控制效果验证
系统模型是参照文献[1]、文献[4]和文献[7],完全按系统的数学方程建立的。利用该模型仿真模拟系统在多种工况下的运行情况,对电压、电流、转矩、转速和磁链等参数的取值及其变化趋势进行计算分析。计算结果在正常误差范围内,模型参数与电机实际运行时的参数具有相似性,表明该仿真模型是可行的,能反映系统的运行状态和运行效果。
以该模型为基础,分别模拟十五相电机在分组运行、调速运行、变负载运行和正倒车运行等典型工况下的运行情况。
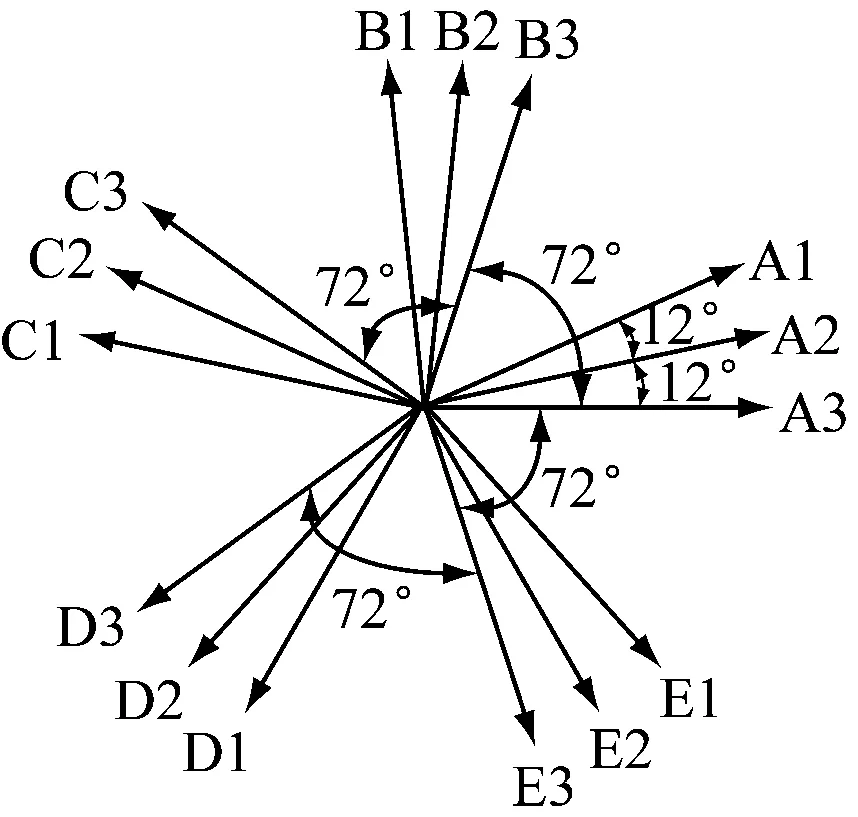
1)工况1:分组运行。启动和低工况时,1组五相运行;中工况时,2组十相运行;高工况时,3组十五相运行。在分组运行时,不工作组的逆变器通道封闭,电机绕组开路,工作组仍呈对称分布。在模拟工况下模拟以最低稳定转速20 r/min(1组五相)启动→以转速90 r/min(1组五相)运行→以转速120 r/min(2组十相)运行→以转速200 r/min(3组十五相)运行→以转速120 r/min(2组十相)运行。图8~图11分别为工况1下的转速响应曲线、转矩响应曲线、A相调制电压波形和A相线电流。

图8 工况1下的转速响应曲线

图9 工况1下的转矩响应曲线
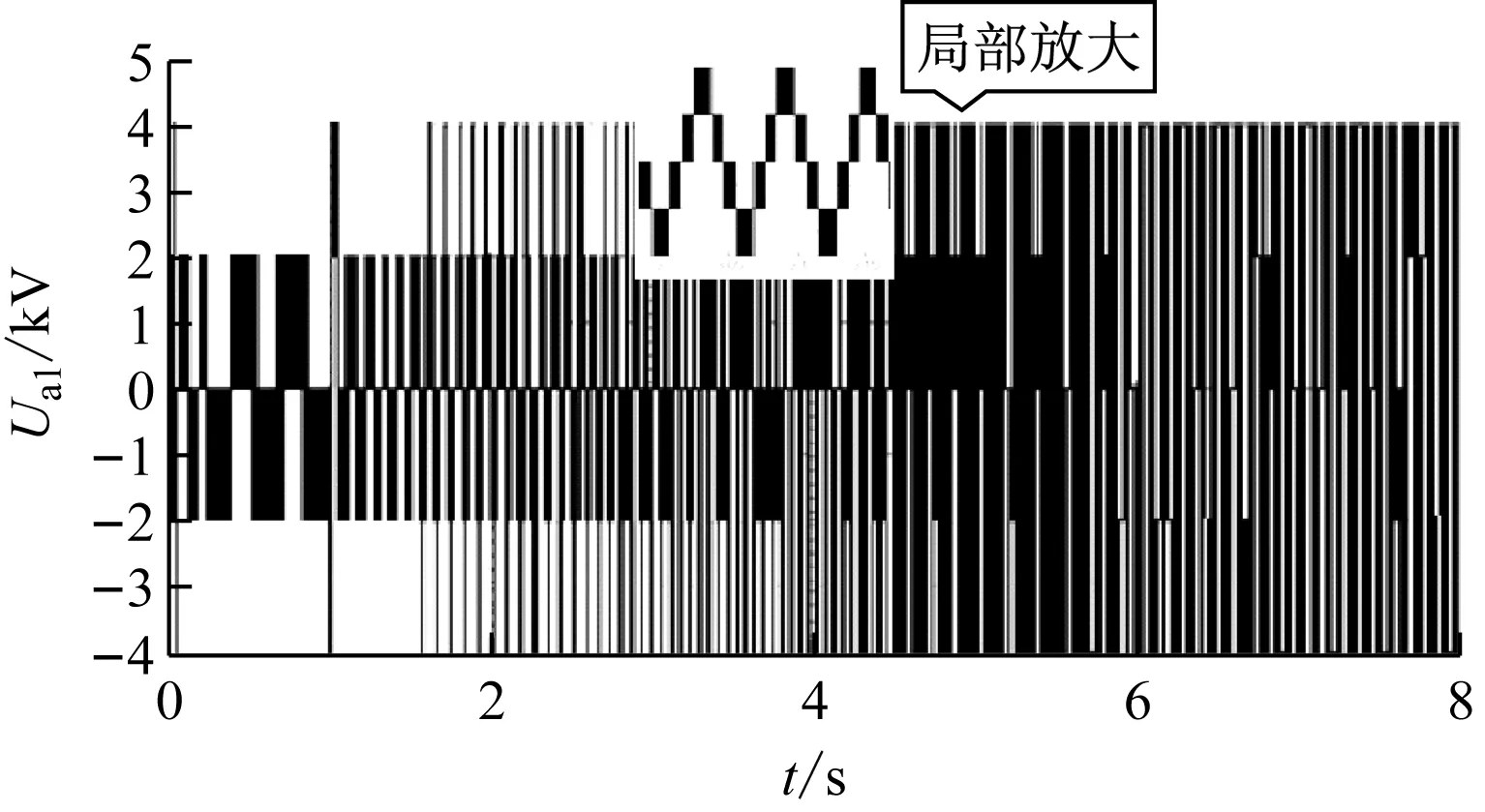
图10 工况1下的A相调制电压波形

图11 工况1下的A相线电流
2)工况2:调速运行。主要模拟过程包括:启动后低速稳定运行(20 r/min)→加速运行→额定转速运行(200 r/min)→超速运行(210 r/min)→减速运行(100 r/min)。图12和图13分别为工况2下的转速响应曲线和转矩响应曲线。

图12 工况2下的转速响应曲线
图13 工况2下的转矩响应曲线
模型运行过程中转矩脉动较小,极限低速时转矩脉动比例稍大(±2%),正常中高速运行时转矩脉动很小(±1%以内),稳态调速精度较高,均能达到±0.2 r/min。
3)工况3:变负载运行。主要仿真模拟电机启动带额定负载达到额定转速之后的变负载工作,负载系数(参照式(9))的变化过程为0.25→0.30→0.25→0.15。图14为工况3设定的负载系数;图15和图16分别为工况3下的转速响应曲线和转矩响应曲线。

图14 工况3设定的负载系数

图15 工况3下的转速响应曲线

图16 工况3下的转矩响应曲线
4)工况4:正倒车运行。主要模拟电机启动带额定负载达到额定转速之后,急减速达到倒车额定转速。图17和图18分别为工况4下的转速响应曲线和转矩响应曲线。

图17 工况4下的转速响应曲线

图18 工况4下的转矩响应曲线
通过模拟十五相电机在分组运行、调速运行、变负载运行和正倒车运行等4种典型工况下的运行情况发现,调速过程中实际转速跟随给定转速变化,变负载时能快速调节转矩适应负载的变化,整个过程中系统的响应速度快,稳定性好,超调量小,转矩脉动小,调速精度高,电压调制度高,谐波小,达到了预期的控制要求。特别是十五相电机相比三相电机具有分组运行的优势,在低工况下采用1组五相运行,在中工况下采用2组十相运行,在高工况下采用3组十五相运行。通过比较工况1与工况2可知,在低工况下采用1组五相运行时,低速稳定性更好,转矩脉动更小。系统在分组运行时的稳定性较好,只是带负载能力稍差一些,适合在中低工况下运行。
4 结 语
通过分析十五相电机电力推进系统的结构和数学模型,采用矢量控制方法搭建了十五相电机矢量控制仿真模型,并对4种典型工况进行了仿真模拟,结果表明,该十五相电机矢量控制仿真模型的控制效果良好,响应速度快,稳定性好,调速精度高,转矩脉动能始终控制在合理的范围内,抵抗外界干扰的能力强,负载的调节能力强,能保证系统稳定可靠运行,达到了预期的控制要求,表明了十五相电机矢量控制方法的有效性、适用性和合理性。
十五相电机相比三相电机能在中低工况下分组运行,分组运行时低速稳定性更好,且其在可靠性和电流调制灵活性方面的优势是三相电机无法相比的。当遇到故障相时,可通过脱开故障组,或控制剩余各相电流,改变不对称性,维持磁链接近为圆形,提高电机缺相运行时的稳定性、带负载能力和可靠性。因此,十五相电机具有重要的研究和实用价值。
本文主要研究了十五相电机的矢量控制方法,理论上能直接在实际项目中应用,但在实际应用时需考虑开关频率、开关速率和安全保护等方面的问题。具体来说,开关频率和开关速率会直接影响PWM效果,需进行相应的修正,并保证互斥开关的时间差;在实际控制过程中,在安全方面要增加过流保护、过载保护、过热保护、速率限制保护和制动控制保护等,保证设备安全稳定运行。