用于在轨服务的多天线差分GNSS相对定位研究
2022-11-16胡兆俊陈宏宇范森权常亮
胡兆俊 陈宏宇 范森权 常亮
(1 中国科学院微小卫星创新研究院,上海 200135)(2 中国科学院大学,北京 100049)(3 上海科技大学,上海 201210)
自世界航天技术发展以来,航天器在轨服务技术越来越受到重视。这是由于航天器设计、制造、运输、发射和空间运行存在各类不确定性因素,即使采用高可靠性设计也难以保证航天器百分百可靠。面对大部分硬件损坏,燃料耗尽问题,往往只能靠制造和发射新的航天器来取代原有航天器,由此造成极大的经济损失,航天器在轨服务技术是解决这些问题最有效的途径之一[1-2]。实现高精度、高可靠、高实时的相对导航是执行在轨服务任务的关键技术。
基于全球导航星座系统的相对导航技术是该领域重要的发展方向,该技术能够同时满足多种军用/民用航天任务的技术需求,并且其载荷在体积、质量、功耗和成本等方面相对其他技术具有很大优势。早在20世纪末基于星载GPS技术的航天器相对导航在交会对接试验中就得到了应用。1998年日本宇宙开发事业集团(NASDA)在工程试验卫星-7(ETS-VII)任务中首次验证了基于星载GPS的相对导航技术。在两星相距10 km~500 m相互逼近的阶段以GPS差分伪距测量作为观测量。试验取得的相对位置精度在10 m以内,相对速度精度在3 cm/s以内[3]。进入21世纪后,世界各国开展了大量基于GPS测量的卫星编队飞行试验。如2000年由英国萨瑞卫星技术公司设计制造的纳米卫星(SNAP-1)和我国的清华-1(Tsinghua-1)卫星构成的卫星编队[4],2000年的美国星载GPS相对测量在轨飞行试验的代表性研究重力场测量(GRACE)卫星编队等[5]。2012年10月14日,我国以一箭双星方式将实践九号A/B(SJ-9A/B)卫星成功送入离地高度为623 km/650 km的太阳同步轨道。2012年10月底,SJ-9A/B首次完成了双星编队飞行和高精度GPS星间基线测量试验。在星间基线为1.5~5 km范围内,星载滤波算法基于差分GPS载波相位测量获得了优于3 cm的相对定位精度。综上所述,差分GNSS星间相对定位的应用越来越成熟,对任务航天器由远及近的高精度引导起到了重要作用。但是对于在轨服务任务,往往涉及到对目标航天器的近距离绕飞观察,此时天线由于姿态变换无法稳定对天,导致了因任务航天器与目标航天器共视导航卫星数量不足而产生的差分中断问题。
文献[6]基于描述卫星相对运动的C-W方程对星间相对位置和相对速度进行卡尔曼滤波估计,使用轨道动力学与差分GNSS相结合的方法使得相对定位数据具有时间连续性和平稳性。该方法对于短暂的差分GNSS中断具有一定的抗干扰性。但是在轨服务任务往往涉及到连续的轨道机动,此时载波相位差分可能陷入长时间的中断。此外,基于多源信息融合的相对导航在一定程度上也可以克服缺失GNSS信号带来的影响[7]。
本文基于矢量运算原理设计了天线间组合差分的方法,该方法可以有效增加差分GNSS数据观测量,使得执行在轨服务任务航天器在近距离绕飞目标航天器时能够有稳定的差分GNSS数据输出。
1 在轨服务场景构建与坐标系定义
1.1 在轨服务场景建模
本节介绍由A、B双星构成的在轨服务任务场景,包括轨道六根数的设置以及动力学场景。设B星为一颗在轨出现故障的科学试验卫星,其轨道六根数见表1。
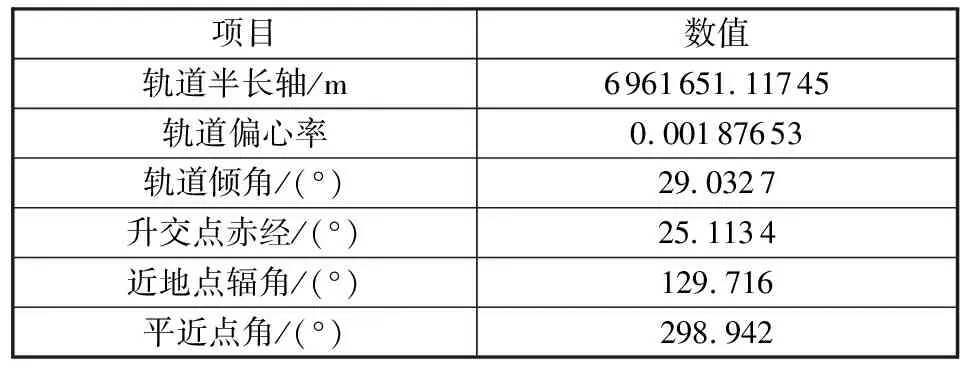
表1 卫星B轨道参数设置
A星为作业星,通过悬停、直线抵近、10 m绕飞3个阶段逐步接近并观察B星。本文通过B星载具速度局部水平(Vehicle Velocity Local Horizontal, VVLH)坐标系描述双星相对运动,定义见1.2.1节。A星在以B星质心为中心的VVLH坐标系下各阶段相对于B星的距离如图1所示。

图1 A、B星相对距离
全流程B星保持稳态对天,A星悬停、抵近段保持对天。绕飞阶段,A星俯仰角由0至360°变化,偏航角与滚动角变化为0,以保持光学载荷对B星进行持续观察采集数据,A星在B星轨道面内相对运动示意如图2所示。
从图2可知,绕飞时的俯仰姿态变化必然会导致A星天线覆盖天区的不断变化,从而使得与B星的共视天区逐步减少。
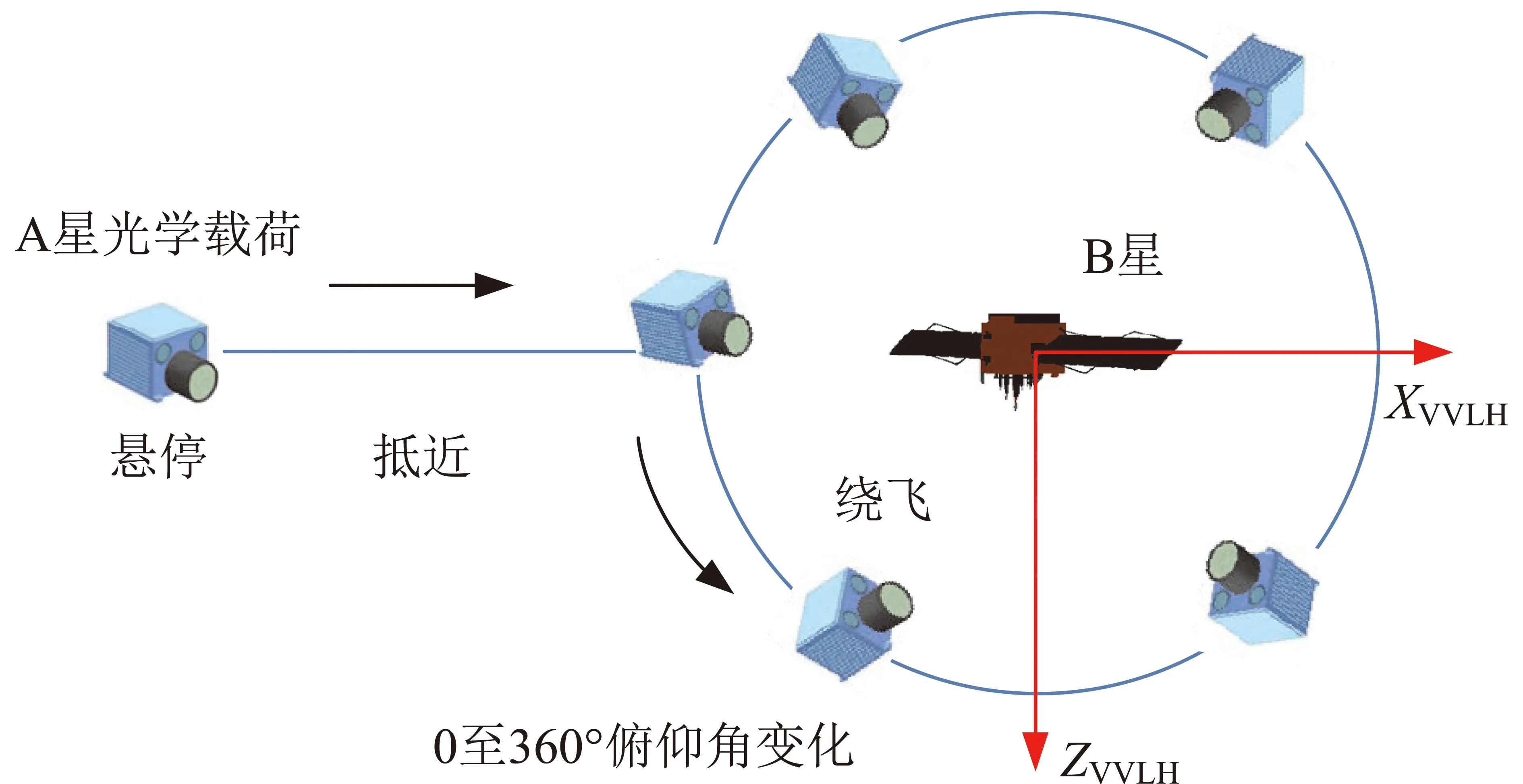
图2 A、B星相对运动二维示意图
1.2 坐标系定义
1.2.1 VVLH坐标系
VVLH坐标系是轨道坐标系的一种,可以直观反映双星相对位置。其定义如下:坐标系原点为卫星本体质心;XVVLH轴沿卫星飞行方向,由YVVLH×ZVVLH确定;YVVLH轴为轨道面负法向;ZVVLH轴指向地心方向,如图3所示。
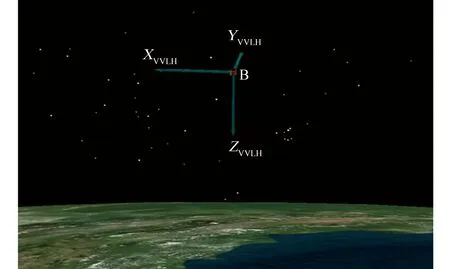
图3 VVLH水平坐标系示意图
1.2.2 ECEF和NED坐标系
地心地固直角(ECEF)坐标系,简称地心地固坐标系,其定义是:原点OECEF与地球质心重合;ZECEF轴地球自转轴重合并指向北极;XECEF轴指向格林尼治子午面与赤道的交点;YECEF轴垂直于XECEFOECEFZECEF平面并与XECEF、ZECEF轴构成右手坐标系,如图4所示。在导航定位方程中,用户(例如GNSS接收机)和卫星的坐标系都采用该坐标系描述,导航星模拟器的相关参数也定义在ECEF系下。
北东地(NED)坐标系,也叫做导航坐标系,是在导航时根据导航系统工作的需要而选取的用于导航解算的参考坐标系。其坐标原点通常选取载具的质心,XNED轴指向地球北,YNED轴指向地球东,ZNED轴垂直于地球表面并指向下,如图4所示。本文将NED坐标系做为过渡坐标系,将本体系的坐标转换到ECEF系。
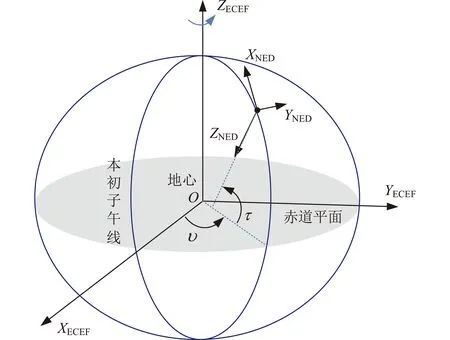
图4 ECEF和NED坐标系示意图
1.2.3 本体坐标系
卫星的本体坐标系严格附着在卫星之上。本体坐标系与NED坐标系相似,伴随着运动体运动,但是不同之处在于本体系会随载体的姿态变化而旋转,而NED坐标系不会。本体坐标系的原点为卫星的质心,3个坐标轴在偏航角、滚动角和俯仰角为零时,Xb轴指向飞行方向,Zb轴指向地心,Yb轴和Xb、Zb轴构成右手坐标系,如图5所示。
图5中,本体系随Xb轴旋转产生的角度为滚动角,右滚动为正;随Zb轴旋转产生的角度为偏航角,右偏航为正;随Yb轴旋转产生的角度为俯仰角,向上为正。注意本文本体系姿态角参考系为NED。
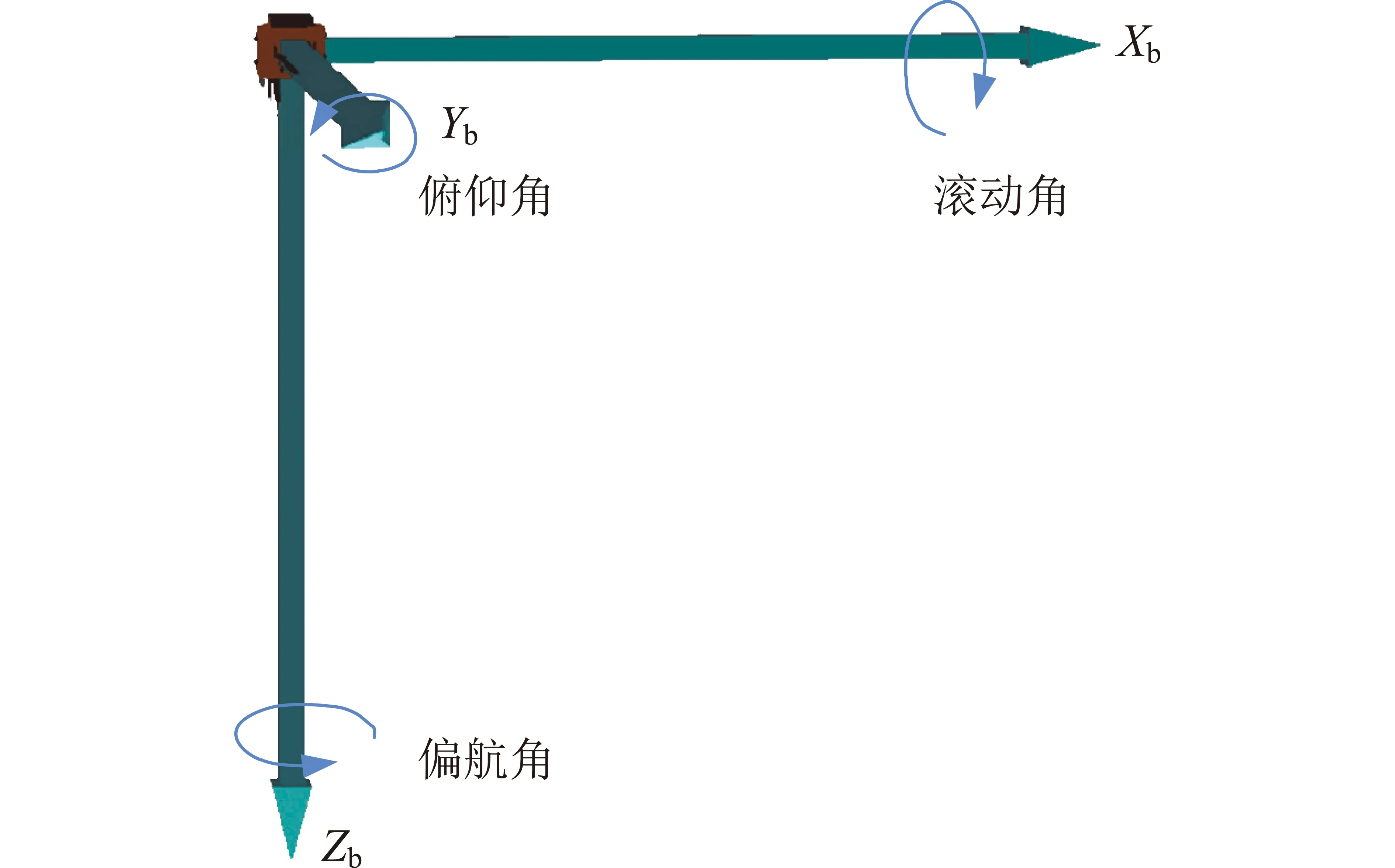
图5 本体坐标系示意图
2 三天线观测量组合差分
2.1 三天线观测量组合原理
导致A星近距离绕飞观测时差分中断的原因主要是A星各天线与B星天线共视观测量不足造成的,因此将三天线的观测量进行组合,获得更多的共视观测量是对该问题的一种解决思路。本节介绍基于向量运算原理将三天线观测量归算至同一天线的方法(实际可归算到任一点)。如图6所示,设两天线安装位置矢量为r(在卫星本体系下定义),某一时刻GNSS接收机即时测得的天线1相位中心在ECEF系中到GNSS卫星的矢量为d1,则换算到天线2处的测距观测值d2为
d2=|SMr+d1|
(1)
式中:M为坐标变换矩阵,用于将本体系下的坐标转换至NED坐标系(注意此处GNSS接收机获得的本体系姿态信息是由导航星模拟器提供的,导航星模拟器生成的姿态信息已经转换为NED参考系),由航天器本体系下的姿态(俯仰角θ、滚动角φ和偏航角ψ)信息构成。具体表达式为
(2)
S也为坐标转换矩阵,用于将NED系下的坐标转换至ECEF系,和卫星星下点经度υ和纬度τ相关,如图6所示。具体表达式为[8]
(3)
试验过程中航天器姿态信息将由动力学仿真机转换至导航星模拟器(应用参考系NED描述姿态)后给出。矢量r由天线相位中心在本体系下相对质心的坐标给出,导航星模拟器设置的A星三天线相位中心相对于卫星质心相对坐标见表2。
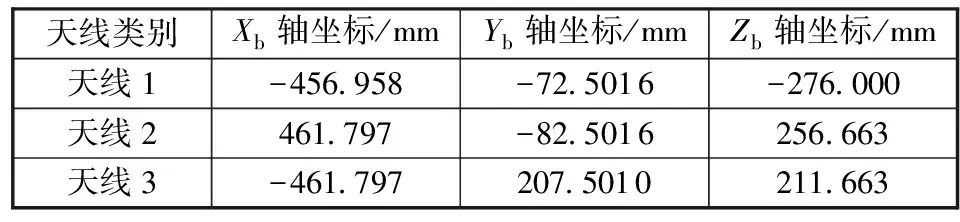
表2 A星三天线相位中心位置坐标
经式(1)转换后,天线2的观测量将增加, 示意如图6所示。
图6中Xb,Yb,Zb坐标轴代表姿态为俯仰角θ、滚动角φ和偏航角ψ下的本体系坐标轴。可见图6中天线2的载波相位观测量增加,与目标航天器之间的共视卫星数也会增加,从而能够获得足够的双差载波相位方程用以支撑相对位置解算。在轨三天线观测量组合示意如图7所示。
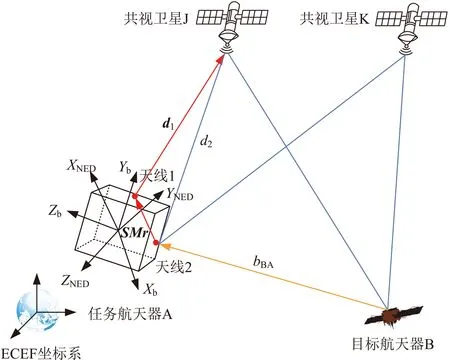
图6 天线观测量换算示意图
图7中B星可见卫星S2~S7,三天线不归算时天线2与B星共视卫星为S4~S6,数目最多但少于5颗,不满足差分要求。三天线归算至天线2后,B星可见卫星S2和S3也会成为天线2的可见卫星,从而满足差分解算方程对共视卫星的数量要求。

图7 三天线观测量组合示意图
2.2 差分GNSS相对定位主要过程
在轨服务差分GNSS相对定位的主要过程如图8所示。
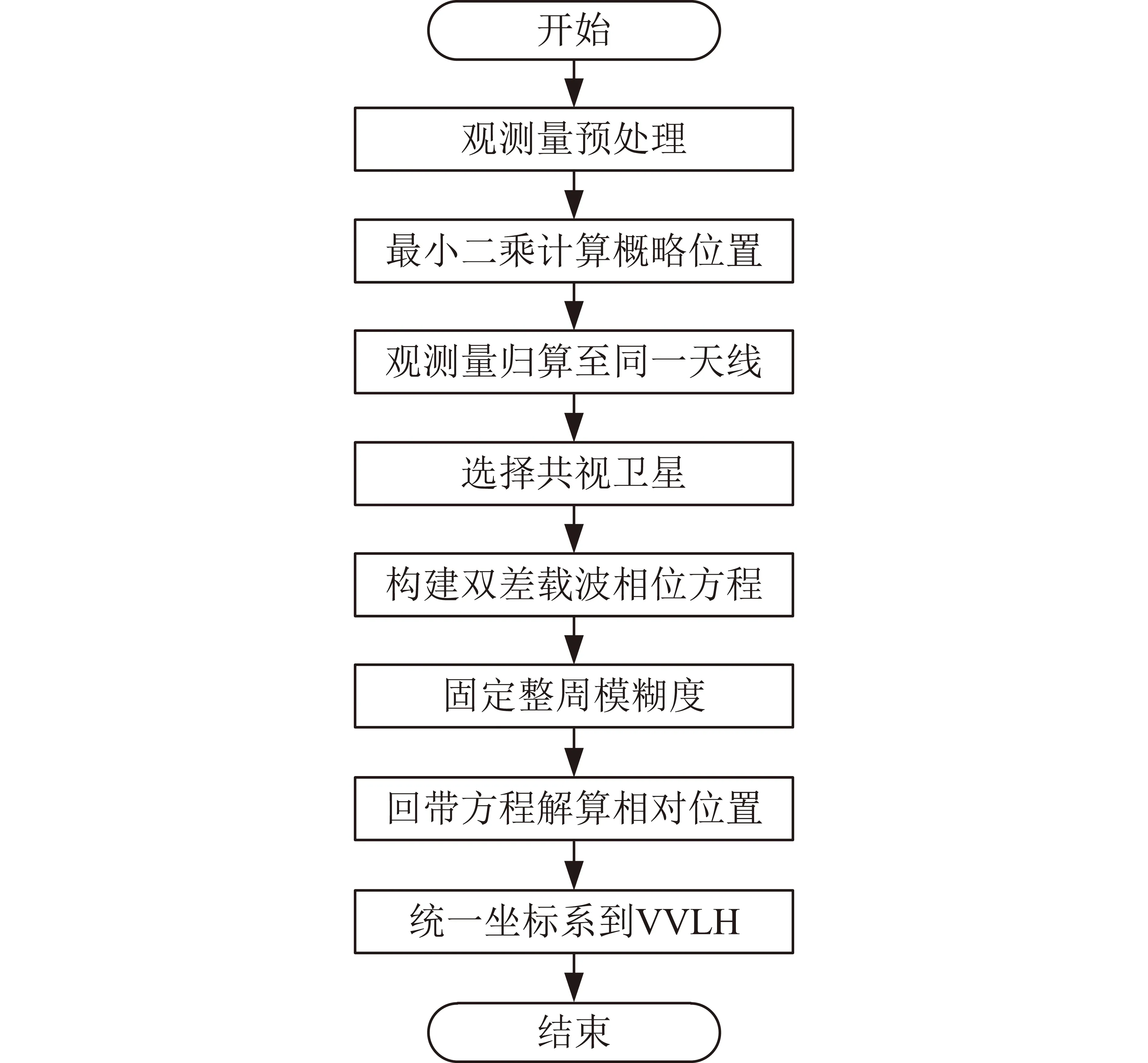
图8 算法主要步骤
其中观测量归算至同一天线对应2.1节的方法。本小节将概略介绍双差载波相位方程的构建、固定整周模糊度与统一坐标系到VVLH坐标系的思想,具体如下。
1)构建双差载波相位方程
载波相位测量的观测值是接收机所接收的卫星载波信号与本地参考信号的相位差,但载波相位观测值并不准确,存在信号传输电离层延迟、对流层延迟,以及接收机钟差和导航卫星钟差。对于载波相位观测方程存在的一些误差可以通过站间单差与星间双差进行有效的消除,单差可以彻底消除导航卫星的钟差,双差能进一步消除接收机钟差。考虑到在轨服务任务执行的区域往往高于400 km,此时电离层与对流层的延迟可以忽略不计,另外在双接收机相对位置较近且高度基本相同时,单差电离层延迟与单差对流层延迟也基本近似为零。因此在轨服务场景下的双差观测方程可表示为[9]

(4)

2)固定整周模糊度
φ=TΔbBA+PN
(5)

3)统一坐标系到VVLH
为了双星相对定位结果更为直观,本文将差分GNSS接收机相对位置数据转换到目标星VVLH系下,同时一方面导航卫星运行在地心地固坐标系下,另一方面卫星的轨道是定义在地心惯性坐标系下的,因此涉及到地心地固系转地心惯性系[9],以及地心惯性系转VVLH系[12]。
3 仿真分析
3.1 半物理仿真系统
在轨服务多天线差分GNSS半物理仿真系统由两台双通道思博伦GSS7000导航星模拟器、动力学仿真机、GNSS接收机、差分GNSS接收机和控制与分析计算机组成。连接示意如图9所示。
图9中姿态轨道动力学仿真机用以输出A、B星轨道动力学数据,动力学控制计算机发送动力学指令,两台双通道导航星模拟器模拟A星的天线1、天线2、天线3和B星的天线(与VVLH系指向一致)所接收的导航星信号。GNSS接收机由B星携带视为移动基站差分GNSS接收机由A星携带,通过星间通信连接基站与差分GNSS接收机进行计算。最终通过统一到VVLH系下的差分相对位置数据与动力学仿真机相对位置数据作比较获得差分相对位置的精度。
本文设计了两种试验工况:一种是单天线切换差分;另一种是三天线组合差分。两种工况环境设置(卫星轨道、导航星模拟器参数以及天线位置等)相同,差别在于差分GNSS接收机对于载波相位观测量的计算逻辑。两种工况的试验流程一致,只接入北斗导航星座信号,轨道动力学起点相同,星上时间起点相同,如图1所示,试验数据分析见3.2节。
3.2 单天线切换差分数据分析
单天线切换差分即通过A星三天线轮循查找差分成功的天线输出相对位置结果(多个天线成功则选择共视卫星多的天线输出结果,多个天线失败则返回天线1的状态),试验全流程天线切换情况、共视卫星数量如图10、图11所示。
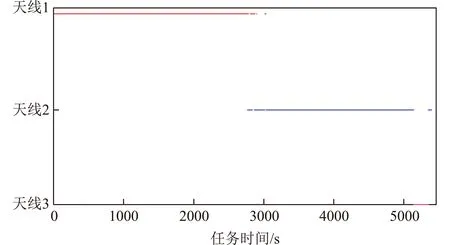
图10 A星单天线切换示意图
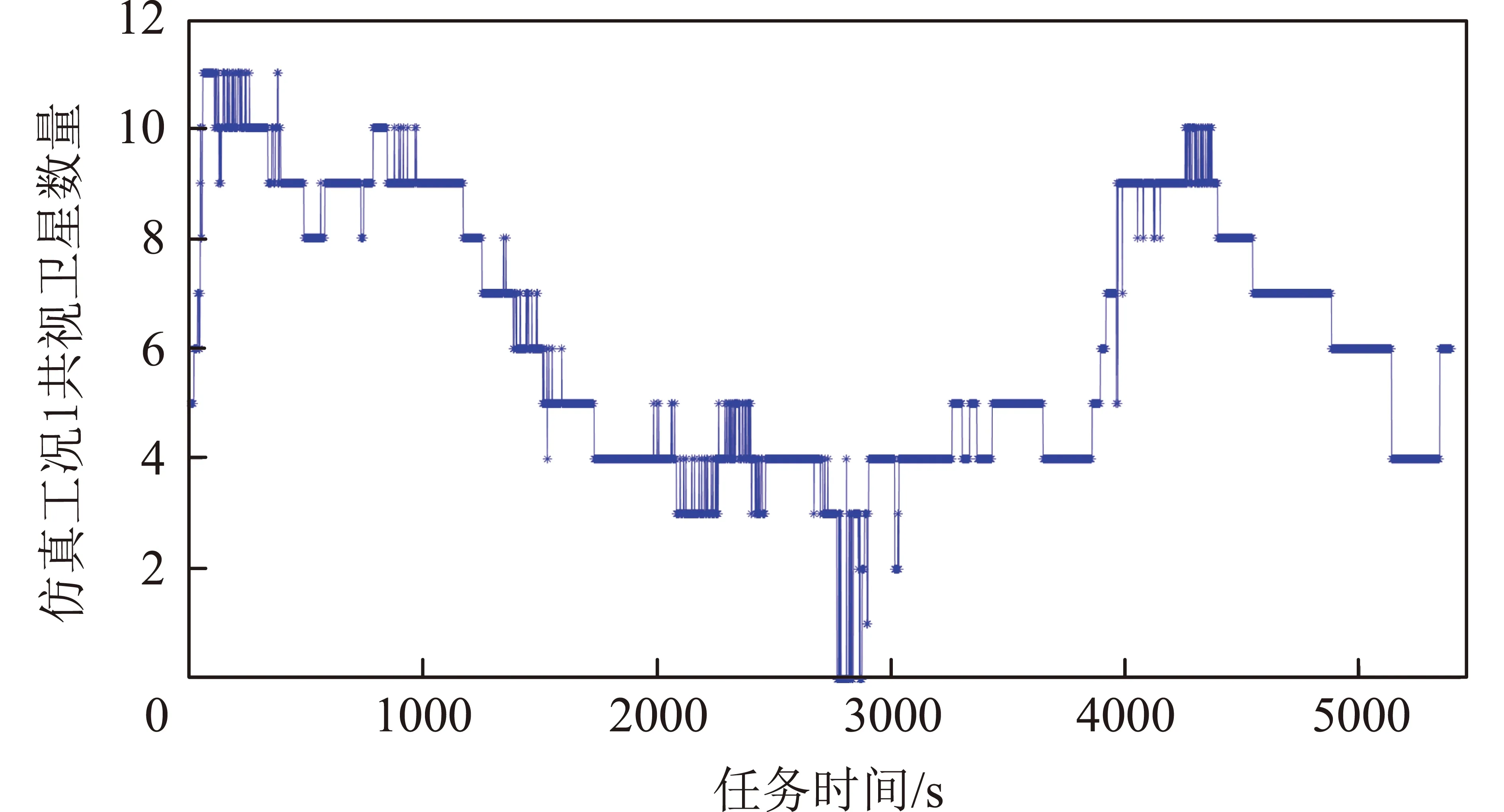
图11 仿真工况1共视卫星数量
通过差分GNSS接收机相对位置数据结果与动力学仿真相对位置数据做差得出误差结果如图12所示。
从试验结果可知,虽然三天线发生了切换,但全流程A星差分天线与B星天线共视卫星数长时间不足5颗,使得差分解算方程个数不足,从而导致如图12所示的差分中断,这进一步会导致轨控失败,使任务卫星进入安全模式从而影响整个在轨服务任务。导致这一问题的原因:一方面是俯仰机动使得A星三天线都不朝天,即使能收到北斗导航星信号,但是与B星天线的共视卫星数不足;另一方面试验任务的前半段离亚太地区较远,北斗导航星信号较弱,这使得收星数较少(在轨服务任务的轨道一般要考虑光照、数传等条件,要尽量保证数传段在亚太地区上空);此外当A星于3000 s左右运动到B星正下方时,B星的遮挡也使得天线信号不佳。
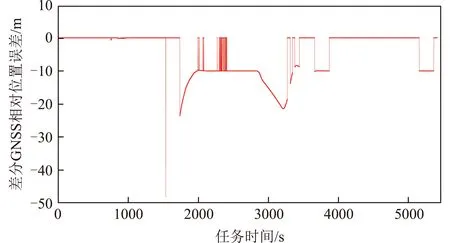
图12 单天线切换差分GNSS相对位置误差数据
3.3 三天线组合差分数据分析
三天线观测量组合模式下的共视卫星数与差分结果如图13、图14所示。

图13 仿真工况2共视卫星数量

图14 三天线观测量组合差分GNSS相对位置误差数据
对比图11和图13,可以看到该方法有效提升了共视卫星数量。同时三天线观测量组合模式下的差分数据对比三天线择优模式稳定性有了极大的提升。图14中仍然存在的一些断点是由载波相位门限值过低、共视卫星的切换等异常情况导致的,但比较单天线观测结果,已经可以通过轨控算法进行过滤。
4 结束语
针对执行在轨服务任务中的航天器姿态运动引起天线接收区快速变化导致的与目标航天器共视卫星数不足的问题,本文设计了一种三天线观测量组合差分的方法。此外,设计了在轨服务任务场景,搭建了半物理仿真系统模拟在轨服务任务中差分GNSS工作状态。通过仿真系统分析了近距离姿态变化下单模差分GNSS存在的问题,发现即使设计多天线切换差分的效果也不理想。经过试验验证,三天线观测量组合差分能够有效提升共视卫星的数量。同时在试验过程中发现当天线相位中心偏离过大时,三天线组合差分的整周模糊度固定成功率会下降,如何提升该方法抗天线相位中心偏离干扰的能力是进一步研究的方向。该方法可为基于差分GNSS进行相对导航的在轨服务任务提供一定的参考。
