TBM钢拱架自动输送系统研究与实践
2022-11-16李深远
李深远
(中国铁建重工集团股份有限公司,湖南 长沙 410100)
硬岩隧道掘进机(TBM)是一种大型隧道掘进设备,具有高效、安全、经济等特点,在铁道、交通、矿山等硬岩开挖领域广泛使用[1-3]。在TBM 的掘进过程中,经常会遇到破碎地层,围岩完整性较差,需要进行及时有效的钢拱架支护作业,以确保TBM 施工的顺利进行。目前的钢拱架支护作业,都是依靠人工作业完成,由工人将运输进来的钢拱架通过搬运拖拽的方式,移动至钢拱架拼装环处,完成钢拱架的拼接作业。这个过程费时费力,大大降低了钢拱架的支护效率,还具有较大的安全隐患。钢拱架的支护不及时,容易导致隧道塌方,从而引起TBM 设备与人员的损伤。因此,如何提高钢拱架的支护效率一直是行业内的研究热点。
到目前为止,众多学者对隧道支护相关内容进行了研究[4-5]。孙振川[6]结合工程实践,提出TBM 超前地质预报、钢拱架、钢筋排和喷射混凝土联合及时支护等一系列确保TBM 连续施工的方案与措施。昝志华[7]从实际案例出发,对TBM支护系统进行了重新设计并改造等措施,最终彻底解决了TBM 在掘进过程中支护效率低的难题。王杜娟[8]分析了近几年国内煤矿TBM 施工案例,提出矿用TBM 开发关键技术,实现掘锚运同步、及时支护。杨华勇[9]针对现有隧道设备的发展情况,提出集最优掘进参数和最优支护方案于一体的隧道掘进机多目标优化模型的智能化设想。何源福[10]利用图谱法,设计了钢拱架抓取对接机构的最优构型,并对机构的传递性能进行了分析,实现了钢拱架的自动拼接作业,大大提高了钢拱架的安装效率。可以看出,目前对隧道支护的研究多集中在施工方法的改进,针对钢拱架快速支护的相关机构研究还较少。
本文从钢拱架自动安装需求的角度,设计了TBM 钢拱架自动输送系统,对其中运输机构和转运机构的电机与油缸进行选型,并对车轮、链条、链轮进行强度校核。TBM 钢拱架自动输送系统能够代替人工完成钢拱架的运输工作,大大加快的钢拱架的安装效率,推进TBM 钢拱架安装智能化的发展。
1 结构组成与工作原理
1.1 结构组成
TBM 钢拱架自动输送系统包括运输机构和转运机构,运输机构把钢拱架运送到拼装环附近的预定位置,转运机构从运输机构上抓取拱架置于拼装环卡爪内。运输机构如图1 所示,每次运送钢拱架数量为5 榀,设置有中间限位框架和两边限位框架,限位框架上均设置凹槽限位结构,确保钢拱架不会在运输过程中发生滑移,各钢拱架能够精准到达指定位置,以方便自动抓取。转运机构如图2 所示,由移动小车和抓取机构组成,两者通过举升油缸连接驱动,抓取机构负责从运输机构上抓紧钢拱架。

图1 运输机构结构

图2 转运机构结构
TBM 钢拱架自动输送系统通过液压马达驱动链轮链条传动,实现运输机构沿隧道轴线方向移动;通过油缸的间歇式往复运动将每一块钢拱架运送至预拼装区域;转运机构通过油缸驱动将预拼装区域的钢拱架转运至拼装环上进行拼接。
1.2 工作原理
TBM 钢拱架自动输送系统的工作原理为:运输机构在链轮链条驱动下,沿轨道平移至转运机构附近的预定位置;运输机构两侧限位框架在油缸驱动下下降,中间两限位框架相对顶升,从而使钢拱架置于中间限位框架;中间两限位框架沿自动抓取机构方向平移,如图3 所示。然后,转运机构上的抓取机构抓取运输机构上的钢拱架,通过卡抓结构进行压紧;转运机构沿轨道平移至拼装环附近的预定位置;抓取机构通过油缸控制升降,将钢架置于拼装环上,如图4 所示。
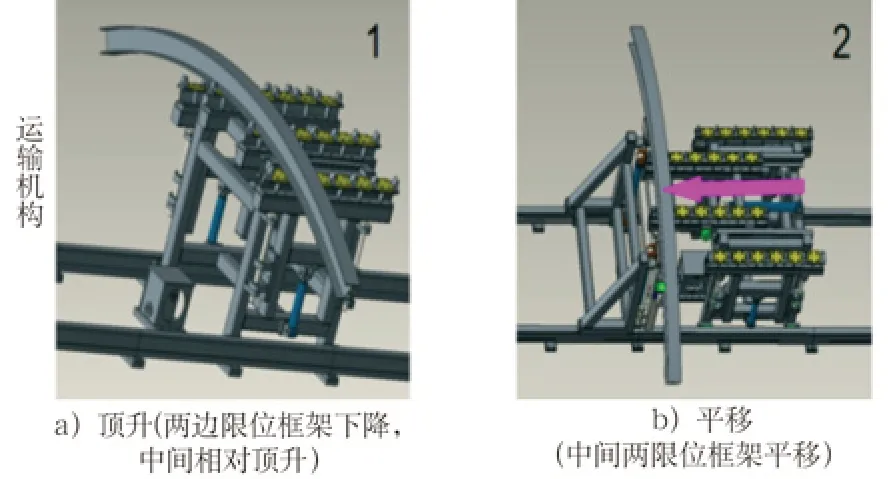
图3 运输机构作业示意图
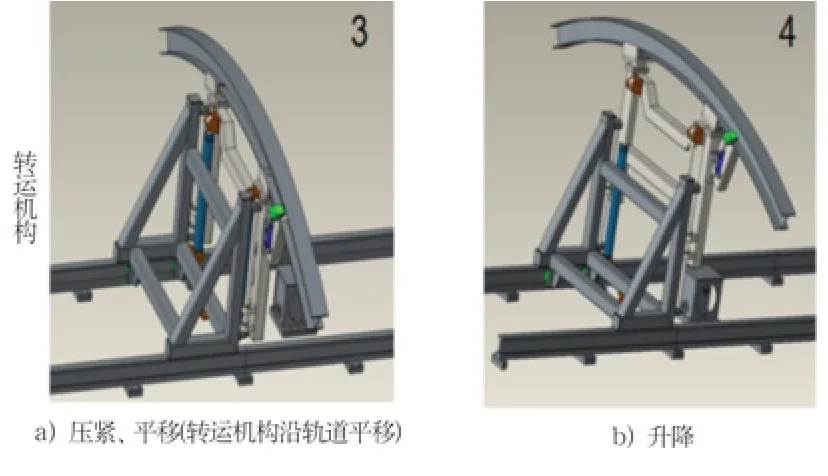
图4 转运机构作业示意图
2 系统结构参数设计
TBM 钢拱架自动输送系统的设计前提是避免与TBM 其他机构发生干涉,同时为了实现钢拱架的自动运输,需要具备驱动系统、行走轮、运输轨道等,占用空间较多。为避免干涉和节省空间,不仅要考虑运输拱架作业情况、同时要考虑整体空间布置,实现极低占用空间(只运输拱架)或多功能运输作业。TBM 钢拱架自动输送系统的技术参数如如表1 所示。
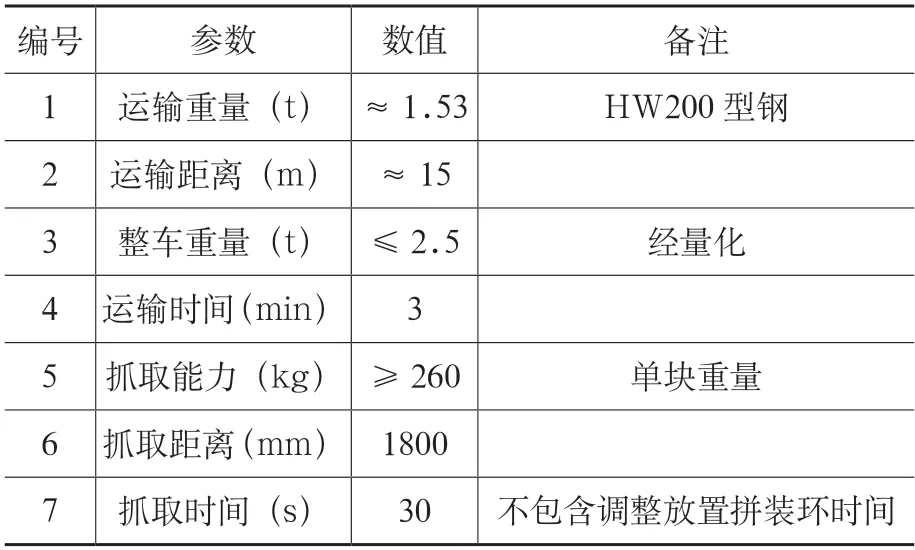
表1 TBM钢拱架自动输送系统的技术参数
2.1 运输机构的电机选型
运输机构需要运送5 榀10m 级的钢拱架,其运输需求如下。
1)HW150 单位重量:30.69kg/m。
2)10m 级隧道支护,钢拱架理论总长度:10m×3.14=31.4m。
3)钢拱架总重量G=48.73×31.4=1530kg。
4)运输机构重量Q=1000kg。
5)小车运行速度v=6m/min。
运输机构在移动过程中的摩擦阻力Fm为

其中,β为附加摩擦阻力系数,取2;g为重力加速度,取9.81m/s;f为滚动摩擦系数,取0.3;μ为车轮轴承摩擦系数,取0.015;d为与轴承配合处车轮轴的直径,取35mm;D为车轮踏面直径:取110mm。
运输机构与钢拱架总重量约2 600kg,小车采用滚动轮行走,小车所需驱动力为

其中,FH为驱动拖拉力;N为运输机构法向受力;μ为运料小车车轮与轨道滚动摩擦系数。
采用两侧电机同步驱动,运行电机功率pj为

其中,η为机械传动效率,取0.85;m为运行电机的数量,取2。
运行电机的动载功率为

其中,Kd为动荷系数。
运行电机输出转速为

其中,d为链轮分度圆直径,d=152.71mm。
理论扭矩为

理论角速度为

因此,选用单电机额定功率需满足Pe>230W,额定输出转速n1>32.74r/min。
2.2 转运机构的油缸选型
钢拱架转运机构包含2 个举升油缸和1 个调整油缸。调整油缸伸缩主要克服的阻力为滑动摩擦,其运动方式为匀速运动。油缸的最小拉力为
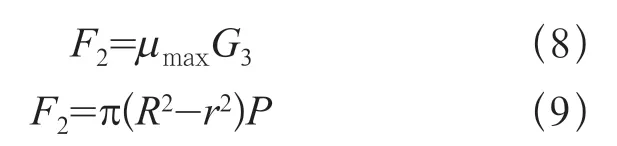
其中,G3为行走油缸法向受力,转运机构与钢拱架总重约为600kg;μmax为金属间滑动最大滑动摩擦阻力,取0.2。
设计调整油缸型号为∅50/∅36-240,压力240bar 时拉力为2.27kN,满足横移调整拉力需求。单块钢拱架重量为2.6kN,垂直向上移动,匀速直线运动,推力约等于重力。抓取油缸作用力为推力,所需推力为

其中,G1为单块钢拱架负载重量,钢拱架为260kg;G2为抓取头等部件总量150kg。设计抓取臂举升油缸型号∅50/∅36-400,压力240bar时推力为4.71kN,满足举升调整需求。
3 强度校核
3.1 车轮强度校核
由于运输机构移动时负载较大,很容易将机构底部的车轮部件压溃损坏,所以需要对运输机构的车轮进行强度校核。
根据TBM 钢拱架自动输送系统的实际工作情况,获得滚动轮的技术要求为:径向载荷不低于30kN,轴向载荷不低于10kN。
车轮的疲劳计算载荷为

其中,Pmax为正常工作的最大轮压(满载),为6 325N;Pmin为正常工作的最小轮压(空载),为2 500N。
车轮的许用轮压P≥Pc即可,完全满足要求。
3.2 链条的强度校核
对于v<0.6m/s 的低速链传动,链的主要失效形式是过载拉断,故按静强度设计条件计算。
链条作用是克服盾构小车的静阻力,则圆周力F 等于静阻力Fm,即

链条的极限拉伸荷载计算式为

其中,KA为工况系数,取1.5;n为链条数量;F为链条紧边拉力,即圆周力,取24 904N;Sca为链条抗拉静强度许用安全系数,取值范围4~8,若速度较低,从动系统惯性小,不太重要的传动或作用力的确定比较准确时,可取小值。
因此,滚子链的极限拉伸荷载需满足>6 096N,结合链条的安全选取原则,使用力矩必须大于极限力矩的3 倍,即需大于18.3kN。
参照相关国标与应用规格标准,采用10A-1链号(50 分,极限拉力22.20kN)以上都可以满足要求极限拉力要求,考虑极限震动工况等不利影响,选用20A-1 链号。
3.3 链轮的适配
所选链条参数如表2 所示,根据相关参数设计配套链轮,链轮设计参数如表3 所示。

表2 链条基本参数
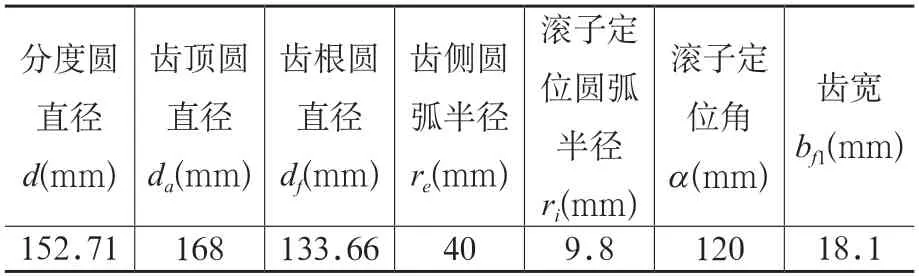
表3 链轮设计参数
4 样机研制
为了证明研究的正确性,根据所求结果,研制了TBM 钢拱架自动输送系统的样机,并进行钢拱架的自动运输实验。
实验结果表明,钢拱架能够准确平稳的进行运输、抓取、升降动作,且在该过程中为发生钢拱架的滑移情况,证明了TBM 钢拱架自动输送系统的可靠性。
5 结论
TBM 钢拱架自动输送系统具有运输、抓取、托举钢拱架的功能,能够将钢拱架运输至拼装环处。该系统能够代替人工完成钢拱架的搬运工作,大大加快的钢拱架的安装效率,推进TBM 钢拱架安装智能化的发展。
TBM 钢拱架自动输送系统样机研制完成后,已进行一系列钢拱架自动运输试验。试验结果表明,TBM 钢拱架自动输送系统的各项性能指标达到了设计要求。
