面向沙土环境的仿生软体机器人及交互力学模型
2022-11-15齐宇燕赵永健钟宋义
杨 扬,齐宇燕,王 舜,赵永健,钟宋义
(上海大学机电工程与自动化学院,上海 200444)
近年来,随着行星探测、沙漠勘测、地质调查等科学活动的不断推进,大量机器人代替了人类工作,被应用于软土环境中.日本千叶大学的Aoki等[1]设计开发了一种名为Tri-StarⅣ的轮式月球车,该月球车具有高效的运动能力;在轮式探月机器人的基础上,Wakabayashi等[2]设计了一种履带式月球探索机器人,该机器人展现出更高效的爬坡越野能力,能更好地适应松软的地形,如沙地、泥地等;里约热内卢联邦大学的Dunker等[3]设计出一种仿生月球资源探测足式机器人,该机器人主要用于收集月球表土,并快速返回中央处理点;佐治亚理工学院的McInroe等[4]在对海龟的爬行方式进行模仿分析的基础上,设计出一种具有良好的通过性能的仿海龟爬行机器人.传统的刚性移动机器人虽然能够利用其自身的结构特性实现高精度、高效率的运动,但是制造复杂、体积和质量较大,难以实现多自由度运动,且环境适应性较差.在覆盖有细粒的松软沙土面上运动时,传统的刚性移动机器人经常因打滑、沉陷、翻倒等原因失效,甚至导致任务失败[5].可见,有必要探索一种环境适应性强、结构简单、易于控制,以及可平稳安全工作的移动机器人.
随着仿生技术、新材料技术和3D打印技术的不断发展和进步,以柔软材料作为机体或执行器的仿生软体机器人的研究正不断走向成熟[6-9].加州大学圣地亚哥分校的Ishida等[10]开发出一种能够在粗糙表面上行走的气动软体机器人,该机器人由3D打印软材料制成,可以根据环境的改变来调整步态并通过障碍;佐治亚理工学院的Liu等[11]设计出一种剪纸皮软体蠕虫机器人,这种机器人通过结合剪纸皮与径向膨胀的气动执行器,模拟蚯蚓的锚定运动;哈佛大学的Tolley等[12]利用化学驱动的方式研制出一种三足柔性机器人,该机器人携带有燃料、气动装置、控制器和电池,可通过丁烷的爆炸性燃烧来驱动执行器并实现定向跳跃.与刚性机器人相比,软体机器人在受到外界冲击后不易损坏,具有质量小、系统安全性高、环境适应性强等特点,在医疗、军事及探测等领域得到了广泛的应用[13-15].此外,软体机器人的本体大多采用3D打印、硅胶浇筑等方式来制备,成本较低.
软体机器人的本体建模通常比较困难,并且与软沙土的交互力学特性较为复杂,因此目前很少有学者研究软体机器人在软沙土上的运动特性和交互力学特性.本工作提出了一种面向沙土环境的气动仿生软体爬行机器人,并深入研究其在沙土上的运动机理以及与沙土之间的交互力学特性,为软体机器人在沙土上的实用化研究提供了基础.
1 结构设计与步态分析
1.1 结构设计
图1为仿弹涂鱼软体机器人的结构示意图,其结构参数如表1所示.图1(b)为仿弹涂鱼软体机器人整体结构图.该机器人由一个3D打印材料制成的中间集成模块和3个硅胶制成的软肢体模块组成.中间集成模块位于整体结构中心,作为机器人的躯干.3个软肢体模块分别位于中间集成模块的左右两侧和后侧,模拟弹涂鱼的双鳍和尾部.每个软肢体内部开了3个气腔,可通过调节腔内气压控制机器人在沙土上的运动.

表1 软体机器人结构参数Table 1 Structural parameters of the soft robot

图1 仿弹涂鱼软体机器人结构示意图Fig.1 Schematic diagram of the structure of the soft robot imitating the marlin
为防止软肢体充气后发生径向膨胀,本工作使用了一种缠绕在硅胶体外部的双向螺旋纤维线(见图1(c)).由于纤维线具有限制作用,故软肢体只能沿着中心线产生轴向变形,可有效抑制径向膨胀,使肢体表现出更加优越的弯曲性能.同时,本工作还提出了一种由薄型3D打印材料制成的平板鳍,可黏附在软肢体的末端.当机器人模仿弹涂鱼往沙土中压入鳍和尾部肢体时,软肢体带动平板鳍插入沙土,增大了软肢体与沙土的接触面积,从而增大了机器人运动时所需的推力.
根据弹涂鱼的运动特性,当机器人即将在沙土上前进时,身体部分抬起,其腹部与沙土的接触面积越小,运动时产生的摩擦也越小.图1(c)为中间集成模块,其底部为四边圆弧形.该设计不仅减小了机器人在运动时与沙土之间的摩擦,而且还能够有效抑制沙土堆积.
1.2 运动步态
根据弹涂鱼的运动特点,可将机器人的一个完整的运动步态分解为插入、推进、收抬、释放这4个阶段.在插入阶段中,左右2个肢体竖直插入沙土并使身体底部抬起,减小行进过程中自身与沙土间的摩擦(见图2(a));在推进阶段中,左右2个肢体往后拨动沙土获得一个向前的力,当该力大于尾部摩擦时,机器人向前推进(见图2(b));在收抬阶段中,左右2个肢体从沙土中收抬出,其空间轨迹为弧形,避免破坏除平板鳍拨动范围外的平整沙土面(见图2(c));在释放阶段中,左右2个肢体的腔体气压全部释放,机器人回到初始状态(见图2(d)).这里,3个扇形组成的圆形从左到右分别表示左右2个肢体的腔体充放气状态,其中黄色表示腔体充气,蓝色表示腔体无气压.
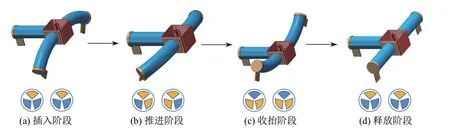
图2 运动步态示意图Fig.2 Schematic diagram of walking gait
2 软体机器人-沙土交互力学建模
2.1 软肢体主动弯曲分析
图3(a)展示了软肢体的截面结构参数定义.图中,r为软肢体半径;r1为软肢体气腔扇形半径;α为软肢体气腔的扇形圆心角;t为软肢体的壁厚.
当各气腔充入不同气压时,软肢体会发生弯曲变形,且各个腔体之间存在耦合现象.本工作将软肢体的3个气腔简化为3个弹簧,每个弹簧分别穿过所在气腔的形心,与原点距离为r0,通过几何计算可知

图3(b)为软肢体偏转弯曲示意图.软肢体的弯曲变形为均匀连续变形,根据图中几何关系可得

图3 软肢体截面与软肢体偏转弯曲示意图Fig.3 Schematic diagram of cross section and deflection and bending of soft limb

式中:l1、l2、l3为弹簧长度;φ为偏转角;θ为弯曲角.
基于如图3所示的软肢体模型,根据软体机器人建模方法[16],气腔压力与大气的压力差ΔPi和简化模型中的弹簧轴向伸长量Δli存在线性关系,即ΔPi=ΔliK,比例系数K为

式中:E为硅胶材料的弹性模量;L为软肢体长度.
结合式(1)~(4)可得软肢体弯曲及偏转模型:

2.2 软肢体-沙土交互力学模型
基于上述软肢体主动弯曲分析,本工作通过构建单个软肢体与沙土的交互力学模型,表征气压与肢体插入力、推进力之间的关系.
2.2.1 插入阶段力学交互特性
在恒定输入气压下,当外力发生变化时软肢体的形态也会发生变化.软肢体-沙土交互作用力如图4所示.在考虑等效沙土外力矩的作用下,力矩平衡公式可表述为

式中:Mpi为平衡气压力对软肢体弯曲轴的力矩;Ma为硅胶材料弹性力对软肢体弯曲轴的力矩;Ms为沙土对软肢体弯曲轴的作用力矩.
结合软肢体建模方法[16]以及式(7),软肢体与沙土交互过程中的弯曲角可表述为

式中:Ds为平板鳍端部到身体部分的水平距离;Fs为平板鳍所受升力.
图4为软肢体模型.图4(a)为软肢体在插入阶段的静态下沉模型,其中L为软肢体长度;H为软肢体与身体连接处到沙土面的距离;R为软肢体弯曲半径;θ1为软肢体弯曲角;r2为平板鳍尖端到肢体端部的竖直距离;h1为软肢体在竖直方向上的弯曲距离;h为平板鳍插入沙土中的有效深度.

图4 软肢体模型Fig.4 Model of soft limb
由图中几何关系可知,平板鳍插入沙土中的深度为

在松散的沙土面上,平板鳍对沙土施加的垂直载荷主要取决于静态下沉量.通过Bekker公式可知[17],平板鳍穿入沙土深度h处的静态压力p(h)为

式中:kc为沙土内聚变形模量;kφ为沙土摩擦变形模量;b为平板鳍在沙土中的插入面积;n为沉陷指数.
通过联立式(8)~(10)可知,平板鳍所受压力与软肢体腔体气压之间的关系为

由作用力与反作用力可知,平板鳍所受升力Fs为

2.2.2 推动阶段力学交互特性
由于软肢体在与软沙土交互过程中的变形较为复杂,因此本工作对软肢体弯曲及偏转模型进行近似修正,其中修正后的弯曲角θeq和偏转角φeq分别为

式中:ξ1为弯曲角修正系数;ξ为偏转角修正系数.
软肢体-沙土交互过程中垂直于平板鳍侧面的推力Fn可表述为

式中:Sp为平板鳍插入沙土中的有效面积;τ为平板鳍上单位面积的剪应力.
在软肢体推动沙土的过程中,剪应力-剪切位移特性可表示为[17]

式中:p(h)为插入阶段的垂直压力;c为土壤内聚力;γ为沙土内摩擦角;h3为软肢体末端在前进方向上的位移;k为剪切系数.
图4(b)为软肢体推动阶段受力分析图.软肢体与沙土的作用面为平板鳍侧面.从图中几何关系可知,前进方向上的推进力Ft为

联立式(13)~(18),气压与推力之间的关系可表述为

2.3 机器人-沙土交互力学模型
以软肢体-沙土交互力学模型为基础,建立机器人在前行运动过程中的机器人-沙土交互力学模型,构建气压与机器人步态间的关系(见图5).

图5 机器人前行运动的受力分析与运动图Fig.5 Force analysis and motion diagram of the robot during forward motion
机器人开始推进的前提条件为身体底部与沙土面刚好不发生接触,当推进力Ft大于尾部阻力fa时机器人开始前行.
综上所述,从图5(a)、(b)可知,机器人在向前运动过程中需要如下条件限制:

式中:Ls为两侧肢体到尾部肢体的距离;Lm为机器人重心到两侧肢体的距离.
如图5(c)、(d)所示,平板鳍滑动沙土后的轨迹长度M为

式中:l为平板鳍的长度.
机器人在推进过程中的位移d可表述为

式中:D为机器人滑行后平板鳍端部至机器人腹部下的距离;h2为机器人软肢体中心连接处到沙土面的高度.
联立式(14)、(22)~(24)以及限制条件(20)、(21),机器人位移d与气压之间的关系可表述为

3 实验与讨论
3.1 实验平台搭建
软肢体-沙土交互力学特性的测试实验台是由气源、电控减压阀、气压测量传感模块、3维力传感器等部分构成,由STM32控制(见图6).软肢体通过导气管与电控减压阀的端口相连.气压传感模块通过导气管与软肢体气腔相连并安装在STM32上.3维力传感器一侧安装软肢体,另一侧通过T型板固连在移动台上.气压传感模块将测得的气压值反馈给STM32.当软肢体与沙土交互时3个方向上的力由3维力传感器测量并记录.

图6 软肢体-沙土交互力学特性测试实验台Fig.6 Testbed for testing interaction force characteristics of the robot and sand
3.2 实验设置
3.2.1 软肢体实验设置
(1)插入阶段.实验过程中仅对软肢体上腔体输入0~80 kPa的气压,每次递增4 kPa.记录软肢体在整个过程中的插入力与气压以验证模型的准确性.
(2)推动阶段.首先,预设软肢体上腔气压为48 kPa;然后,软肢体右腔体单次递增4 kPa的气压,直到80 kPa,通过测得的气压值与力传感器反馈的推力值可以验证模型的有效性.
3.2.2 机器人实验设置
机器人开始向前推进的前提条件为身体底部与沙土面刚好不发生接触.机器人整体质量为150 g,通过如式(20)所示的限制条件可知,身体抬起时所需竖直力分量为1 N,因此机器人向前推进以左右2个软肢体在竖直方向上的合力达到1 N为前提条件.
在推进阶段实验前,给左右2个软肢体分别通入0~48 kPa的气压,单次递增4 kPa.通过气压传感模块和相机分别记录在该过程中机器人的气压值和底部抬起高度.
在完成前行运动插入后,保持软肢体上腔体气压大小不变,对左软肢体右腔体和右软肢体左腔体同时输入0~80 kPa的气压,单次递增4 kPa.通过气压传感模块和相机分别记录该过程中机器人的气压值和位移量.
3.3 实验结果与讨论
3.3.1 软肢体实验结果
软肢体插入阶段气压-升力关系如图7(a)、(b)所示.从实验结果可以看出,升力Fs随气压的增大逐渐增大,且实验数据与模型具有较高的吻合度.图7(c)、(d)展示了软肢体在插入阶段气压设定为48 kPa时推动沙土过程的实验结果.

图7 软肢体插入阶段和推动阶段的实验Fig.7 Experiments of soft limb insertion stage and pushing stage
从实验结果可以看出,推力Ft随气压的增大而增大.图中出现的推力突变是由软肢体滑破沙土导致的,极限气压为68 kPa.图7(a)中实验与模型间出现误差的主要原因是腔体间存在耦合,插入阶段气压越大,推动阶段受影响越大.
3.3.2 机器人实验结果
图8为前行运动的插入阶段与推进阶段实验.图8(a)中,当输入气压达到48 kPa后,机器人身体底部与沙土面分离.在软肢体插入阶段实验中,当气压为48 kPa时,升力Fs为0.5 N,通过计算可知两侧软肢共同产生的升力可将机器人身体部分抬起.
从图8(b)的实验结果可知,在推进阶段过程中,当腔体气压小于32 kPa时机器人没有发生位移,推力一直小于尾部摩擦阻力;当腔体气压在32~62 kPa之间时,机器人开始向前移动,位移随气压增大而增大,且最大为5 cm,推力在此阶段一直大于尾部摩擦阻力;当腔体气压大于62 kPa时,机器人位移不再随气压增大而改变,这是由于随着肢体偏转角度的增大,机器人重心发生前移,导致身体部分接触沙土,推力小于整体摩擦力.而平板鳍在气压不断增大的情况下继续滑动沙土,直至滑破沙土.此外,可以看出理论值和实验值有一定的误差,推断为忽略了平板鳍上的摩擦以及软肢体纤维线的作用所致.

图8 前行运动的插入阶段与推进阶段实验Fig.8 Experiments of insertion stage and pushing stage during forward movement
在软肢体推动阶段实验中,推力在36 kPa时为0.05 N,机器人前行时尾部摩擦阻力为0.1 N,在两侧软肢体共同作用下,机器人克服摩擦向前移动,且最大气压为68 kPa.
综上所述,软肢体插入阶段与机器人插入阶段使机器人身体抬起时的气压大小一致,皆为48 kPa;软肢体推动阶段使机器人产生位移的气压范围为36~68 kPa,与机器人推动阶段产生位移的气压范围32~62 kPa基本一致.因此,软肢体插入阶段模型与软肢体推动阶段模型可以作为机器人推进运动的限制条件,且机器人单次有效位移范围为0~5 cm.
4 结束语
本工作在对弹涂鱼进行结构分析与模仿的基础上,设计了面向沙土环境的软体机器人结构,并对机器人的运动步态进行了设计分析;通过对软肢体与沙土交互力学特性分析,创新性地建立了软肢体-沙土交互力学模型,用于描述在交互过程中腔体气压与肢体末端升力、推力间的关系.在此基础上,本工作还建立了机器人-沙土交互力学模型,用于描述腔体气压与机器人位姿变化间的关系,以此预测分析机器人的运动情况.最后,通过实验分析得出该模型的准确性以及机器人与沙土交互时运动的可靠性.实验结果表明,本工作研发的机器人环境适应性强,控制简单,具有良好的实用价值.此外,所提出的力学模型与实验结果吻合度较高,表明了本模型的先进性.