基于Workbench的触头峰值耐受性能优化
2022-11-11李唯草
陈 瑞,李唯草
应用研究
基于Workbench的触头峰值耐受性能优化
陈 瑞1,李唯草2
(1. 中国舰船研究设计中心,武汉 430064;2. 武汉船用电力推进装置研究所,武汉 430064)
接触器是配电系统的一个重要部件。根据实际使用需求,需具备较强的峰值电流耐受能力。本文对某型接触器进行了三维有限元分析,计算了在短路试验电流条件下,接触器触头的承载电流及受到的电动力,并根据所得电动力分析了限制接触器峰值耐受能力的原因,根据仿真结果对该型接触器进行了结构优化,并通过试验验证了仿真计算与优化方案的正确性。
接触器 峰值耐受电流 电动力 形变
0 引言
接触器是配电系统的一个重要元件,其能接通、承载和分断正常电路条件下(包括过载运行条件)下的电流。
在部分配电系统中,接触器在使用中需要短时耐受过载、短路电流要求时,就要考虑接触器的短时耐受电流能力。接触器在经过短时耐受电流后,不得产生触头熔焊、断开和机械零部件及绝缘件的变形、移位、损伤等现象。
某型接触器的触头系统三维简化模型如图1所示。其动触头杆采用两边对称的断点结构,并且动触头杆采用可在竖直平面转动的刀臂结构。动静触头间采用面接触,动触头杆依靠外部结构机构驱动,以围绕动转轴中心旋转实现接触器的合分操作。
该型接触器试验样机在进行峰值耐受电流试验时,在40 kA的峰值试验电流下出现了触头斥开现象,触头部分被破坏。本文将对其结构进行基于Workbench的仿真计算分析并寻求合适的优化方案。
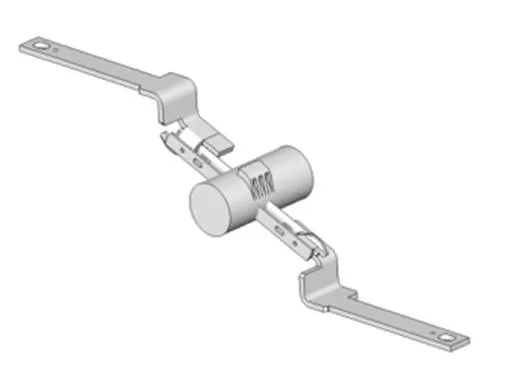
图1 触头结构简化模型
1 计算方法
当大电流流过触头时,在触头回路将产生强大的电动力,根据触头的不同结构,该电动力可能是吸力也可能是斥力;触头中的电流还会在周围产生磁场,在磁场的作用下触头周围的导磁体也会对触头产生作用力;同时由于动静触头间的实际接触面积很小,在接触区域附近还会发生电流线收缩,使得流经动静触头的电流反向而产生电动斥力,即HOLM力。当触头间总斥力大于触头间吸力与触头弹簧提供的预压紧力,动静触头便会斥开,出现喷弧现象,损害触头结构。
在计算触头间电动力时,可以根据触头结构进行相应的简化。而对于本接触器,触头杆的长度与电触头杆间距d之比大于10,在这种情况下模型可以简化为两相等平行无限长载流导体而保证计算误差小于10%以保证工程应用需要,此时可根据比奥-沙伐定律采用公式(1)进行计算:

其中为流经触头的电流,为载流导体长度,为载流导体间的距离。
而对于HOLM力采用公式(2)进行计算

其中:r为导电斑点半径;R为触头等效半径;ξ为触头表面接触系数情况,用来表征接触情况,一般取0.3与0.6。
但对于实际接触系统,其接触形式一般较为复杂,且触头周围磁场相互叠加影响,直接采用公式(1)计算电动力时的误差过大。而采用公式(2)对HOLM力计算的准确性通过试验验证[2]。因此本文先采用三维有限元法对接触器进行单独的电动力分析;基于电动力的计算结果进一步探究限制开关峰值耐受能力的原因。
2 电动力的计算
为了简化仿真过程,在仿真前对模型进行简化处理,删除了接触系统中非导磁部件,仅保留了触头导电系统。简化后的触头电动力计算模型如图2所示。
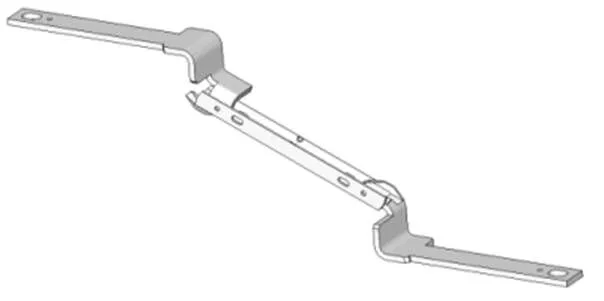
图2 触头电动力仿真模型
根据实际试验要求,在静触头两侧端面加载40 kA直流电流,并根据实际样机情况将模型中的材料设置为铜;并且手动划分网格,保证模型中每处至少有两层计算单元;同时除施加激励断面外,其他四面的计算区域选择2.5倍于工作区域,及5倍于工作区域。
首先计算分析仿真模型磁感应强度和动触头杆电动力。图3为模型磁感应强度分布图。表1为两根动触头杆在不同方向上所受电动力大小。
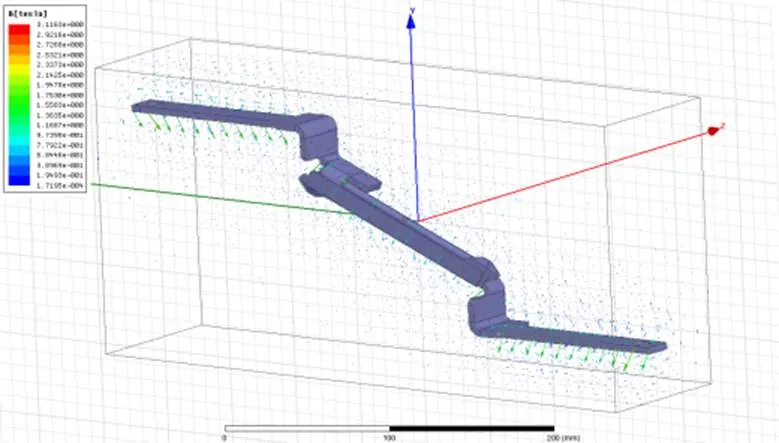
图3 模型磁感应强度分布图
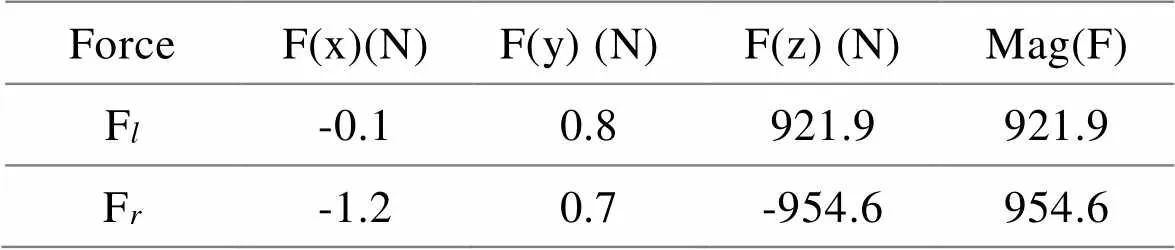
表1 动触头杆受电动力大小
从表1可见,两根动触头杆所受电动力在不同方向上,数值大小基本一致,仅有Z方向上方向相反。因为在通流过程中,两根动触头的电流方向相同,所以二者相互吸引。故在Z方向上受力大小基本一致,方向相反,表现为吸力。
3 HOLM力计算
在得到每根动触头杆所受电动力后可以根据公式(2)来计算触指上的HOLM斥力大小,在计算触头等效接触半径的时候,Fk由(3)式确定:
其中1为触头预压力,2为前文所计算的电动力,为HOLM力。并采用迭代法进行计算以寻求更准确的计算结果。
但是计算结果显示,40 kA电流动稳试验情况下,动静触头见的霍姆力均明显小于电动力。所以霍姆力不会导致触头间的斥开。故此时并不是HOLM力导致此型接触器峰值耐受试验失败。
4 结果分析及优化方案
根据仿真和试验结果,对触头斥开可能原因进行分析:由于根据接触器动静触头结构对称,且两侧动触头的电动力大小基本相同;说明动静触头正中间平面处的位移始终为0,所以模型可以简化为简支梁模型——两端静触头仅提供竖向约束,而不提供转角约束。而电动吸力会使得动触头杆出现弯曲,而导致动静触头之间接触面状况变差,进而使得触头便会斥开。
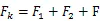
建模:由于触头模型的对称性,同时可以简化为简支梁模型,故在形变计算分析过程中,仅对一半的模型进行建模分析;且约束条件之一就是静触头正中间平面的位移为0。同时由于简支梁模型形变只能是在垂直方向上,而不会在任何方向上发生旋转,故在建模时,直接将静触头简化为两个圆柱体,圆柱体内侧边缘位置与静触头边缘位置一致。且动触头杆的形变会造成动触头杆在静触头上滑动,所以在建模时将动静触头简化Frictional接触对。
综上简化后模型如图4所示。
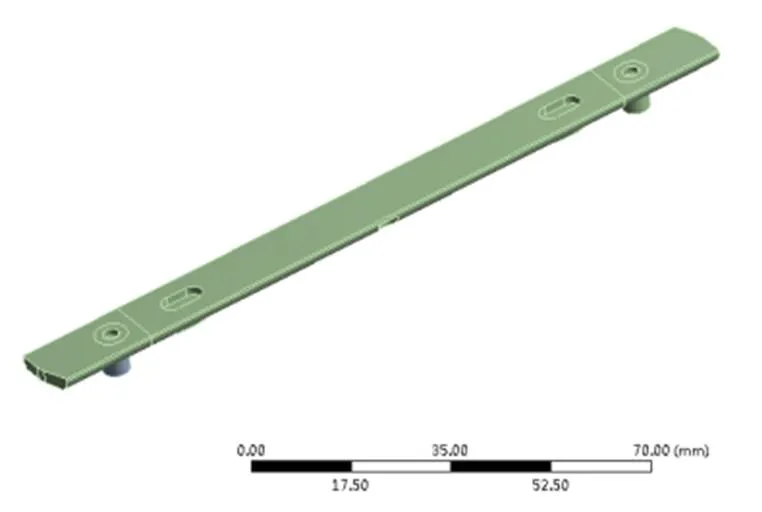
图4 仿真简化模型
施加力:为了便于建模,约束力与电动力的施加是通过在模型表面添加表面印记进行。而在实际通电过程中,动触头杆受到的电动力均为体积力,建模过程也简化为平面力。建模过程中力的施加效果如图5所示。

图5 力的施加
根据图5与40 kA电动力仿真结果得到的动触头杆形变仿真结果如图6所示。
图6 动触头杆形变结果
由图6可知,动触头杆最大形变发生在中部,达到了0.86 mm;动静触头接触区域的形变量也到了0.38 mm。
根据如图5接触器的动触头杆形变特点,可从以下几个方面来减小动触头杆的形变:1)在接触区域增加约束力;2)在形变量最大的地方施加位移约束以减小形变量;3)以上两点改进措施同时施加。
优化方案一:在接触区域增加约束力。在设计仿真过程中,在两端接触区域施加60 N的约束力,即图5中B与C区域施加60 N的力,方向由动触头杆指向静触头。仿真结果如图7所示。
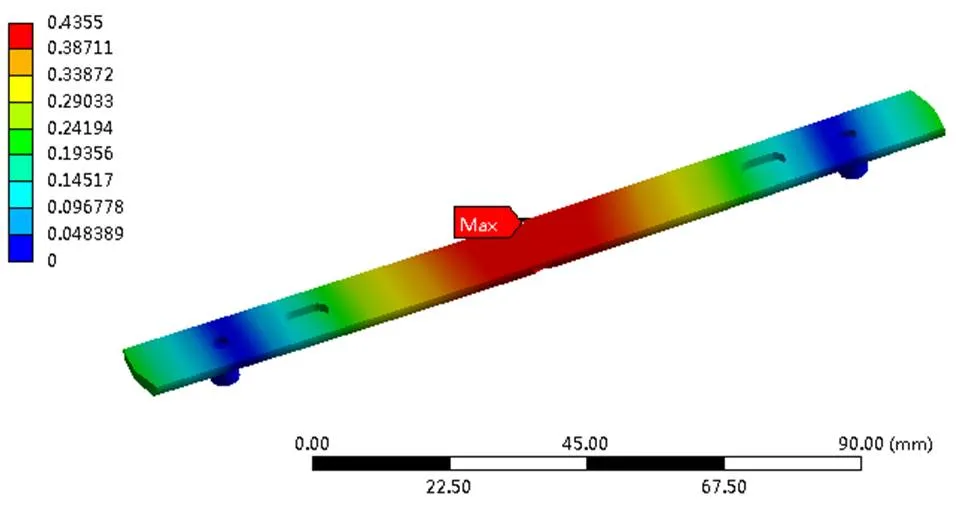
图7 优化方案一仿真结果
由图7可知,动触头杆最大形变发生在中部,达到了0.43 mm;动静触头接触区域的形变量也到了0.20 mm。相比于原设计方案,触头区域的形变量明显减小。
优化方案二:形变量最大的地方即动触头杆中部,施加位移约束。实际设计仿真过程中,模型其它部分不变。其仿真结果如图8所示。
由图8可知,动触头杆最大形变发生在动触头杆端部,同时最大形变量仅有0.12 mm;动静触头接触区域的形变量仅有约0.05 mm。优化方案二后的触头区域的形变量相对于原方案已经明显减小,效果十分显著。
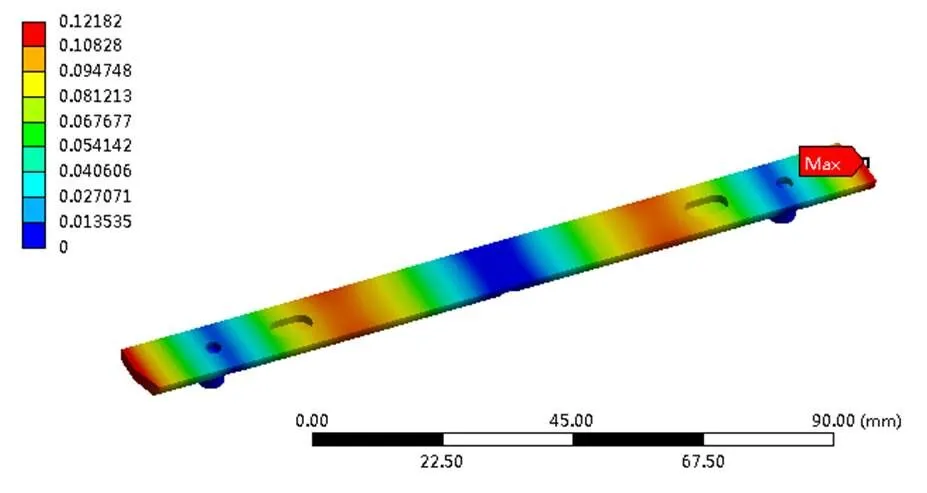
图8 优化方案二仿真结果
优化方案三:以上两点改进措施同时施加。实际设计仿真过程中,模型其它部分不变。其仿真结果如图9所示。
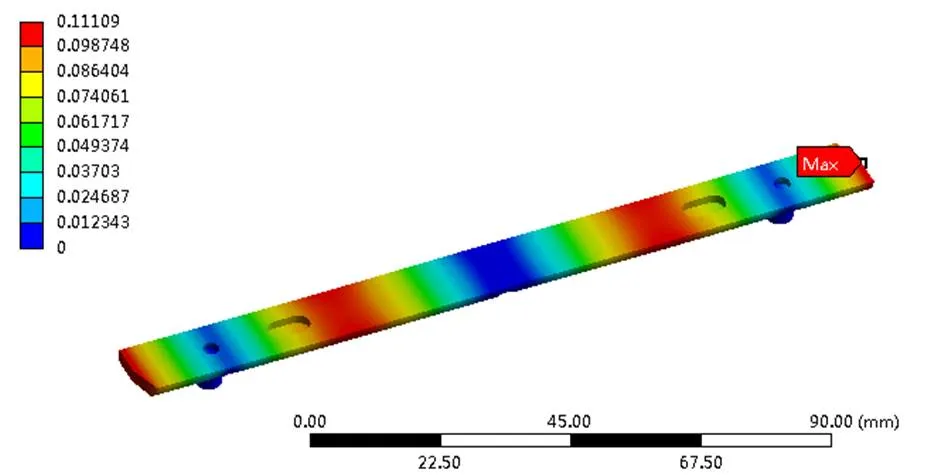
图9 优化方案三仿真结果
由图9可知,方案三的结果与方案二结果相似。动触头杆最大形变发生在动触头杆端部,同时最大形变量仅有0.11 mm;动静触头接触区域的形变量也仅有0.05 mm。优化效果相比方案二不明显。
三个优化方案仿真结果对比如表2所示。
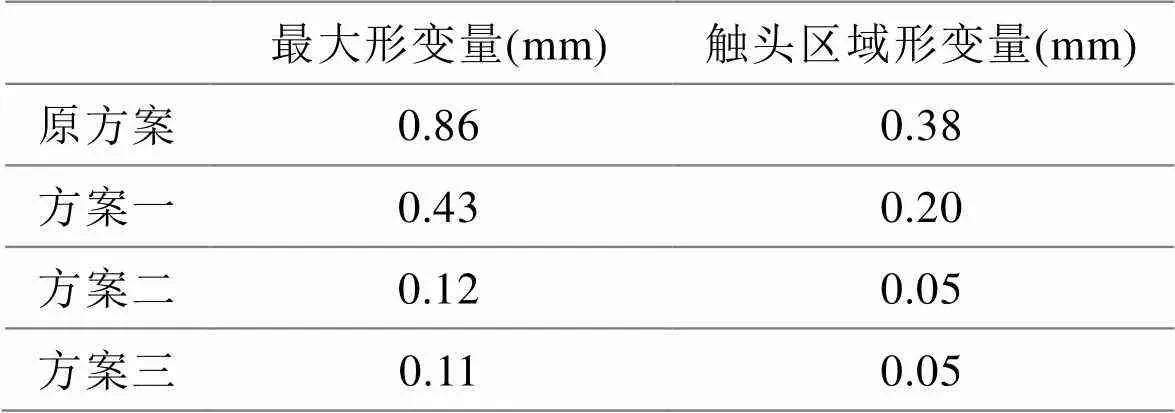
表2 优化方案结果对比
从优化后的结果来看,三个优化方案均可有效的减少触头接触区域形变,因此本文将根据优化方案三对触头系统结构进行改进。
5 试验结果
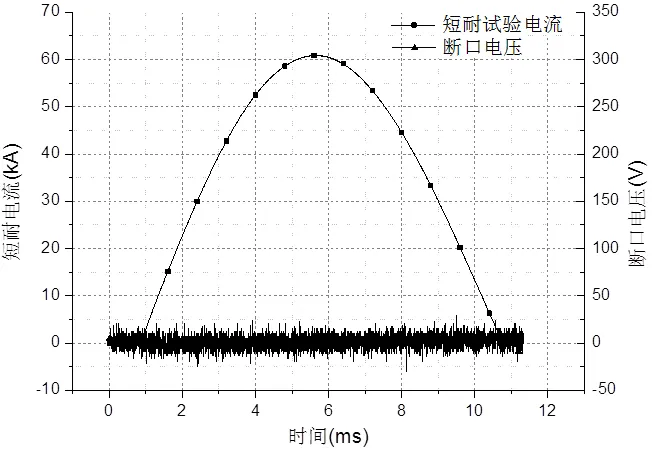
图10 60 kA峰值耐受试验电流波形
对采用了优化方案的新样机再次进行60 kA电流下的峰值耐受电流试验。60 kA峰值耐受试验电流波形如图10所示。

图11 试验成功后触头实物图
试验结果表明,改进后的接触器触头系统在60 kA峰值耐受电流下,试验电流与接触器断口电压未出现突变;说明试验过程中,动静触头之间未发生斥开;同时触头系统未发生明显触头熔焊、断开及损坏现象。相比优化之前的试验结果有了显著的提升,基本达到了仿真预期,证实了仿真计算及优化方案的正确性。
6 结论
本文通过对某型接触器触头结构仿真计算分析及试验验证,得到了以下结论:
1)通过基于Ansoft三维电磁耦合场的仿真计算,从理论上分析了该接触器结构不具备40 kA电流短时耐受能力;
2)对触头在试验电流下所受的电动力进行计算及HOLM力分析,并通过分析计算结果为优化设计提供了理论指导,确定了接触器的优化方案;
3)对优化方案进行了仿真计算和试验验证,验证了该方案的正确性。
[1] 蓉命哲, 吴翊. 开关电器计算学[M].北京:科学出版社,2018.
[2] 许志红. 电器理论基础[M]. 北京: 机械工业出版社, 2014.
[3] 黄蔚偈, 兰太寿, 刘向军. 基于ANSYS有限元法的接触系统电动力分析[J]. 电气开关, 2013(4): 18-21.
[4] 万祥军, 季慧玉, 陈正馨,等. 万能式接触器触头系统电动力仿真与试验研究[J]. 低压电器, 2012(16): 1-4.
[5] DL/T 593-2006, 高压开关设备和控制设备标准的共用技术要求[S].
[6] 李兴文, 陈德桂, 刘洪武, 等. 触头间电动斥力的三维有限元分析[J]. 高压电器, 2004, 40(1): 53-55.
Peak withstand current optimization of contactors’ contacts based on workbench
Chen Rui1, Li Weicao2
(1. China Ship Development and Design Center, Wuhan 430064, China; 2.Wuhan Institute of Marine Electric Propulsion,Wuhan 430064, China)
TM591
A
1003-4862(2022)11-000-0
2022-04-11
陈瑞,(1981-),男,研究生,主要从事舰船电力系统方面研究。E-mail:whsm3998@whzyh.cn