基于图像拼接技术的大视场流体可视化纹影系统
2022-11-08吴敏陈曦杨凯迪朱海东胡少宇
吴敏,陈曦,杨凯迪,朱海东,胡少宇
(1.桂林电子科技大学机电工程学院,广西 桂林 541004;2.广西制造系统与先进制造技术重点实验室,广西 桂林 541004)
纹影技术的工作原理为当入射光在流体中快速流动时,利用对入射光线的折射,从而可视化气流等信息,观察、记录和分析其现象[1]。基于纹影技术建立纹影仪新系统,使其兼具装置构成不复杂、能够定量测量、能实现瞬态特性测量、适合大视场直接测量、适合在复杂环境中测量等优点[2],通过拍摄照片得到并保存相应的纹影原始图像[3],并能够与计算机技术等结合起来,进行定性观测与定量测量[1]。
基于传统纹影技术,通过观察光的折射[4],对流场采取非接触测量。这项技术已然在很多领域得到应用,诸如人体热羽流检测、烃类气体泄漏检测和超声速燃烧室流场的显示等,并得到了一定的研究成果[5]。
纹影法是一种用于流场信息显示和测量的常见方法[6],于1884年被Toepler所提出[7],在19世纪得到进一步完善,并提出了聚焦纹影系统概念与设计方法[8]。19世纪末,纹影技术被广泛应用于风洞流场显示中,随后有相关研究借助反射纹影系统测量流场的速度和密度[9],后续透射式纹影技术和聚焦纹影技术[10]也逐步发展起来。谢爱民等[11]于2013年提出了激波风洞试验流场密度测量的聚焦纹影技术;黄训铭等[12]提出了聚焦纹影图像密度场处理技术。此后,日本和欧洲各国陆续开展了诸多纹影系统相关的设计和研究[13],也逐步发展到了聚焦纹影系统的研究上[10]。
近年来,纹影技术开始向着大视场化不断发展。在光学镜组的加工制造中,抛物面反射镜的加工难度系数与加工成本随其口径的增加呈指数增长,口径为650 mm的单片抛物面反射镜在2000年时的成本就高达1万美元[5]。针对纹影系统中,视场越大,抛物面反射镜面积也越大、配套设施更复杂、制造成本支出更高等缺点,提出制造一套基于图像拼接技术的大视场流体可视化纹影系统,将各个部位采集的纹影图像进行全景合成,实现借助150 mm口径的抛物面反射镜光路系统完成650 mm口径的流场视野的观测。
1 系统构成
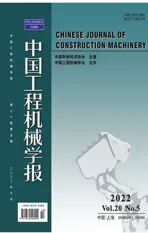
设计的大视场纹影系统总览图如图1所示,主要由光学系统、机械升降系统以及控制模块组成。其中机械升降部分推动光学部分相对于所测流场做直线运动,控制模块保证机械升降部分的平稳运行,减少图像采集过程中因机械振动而引起成像模糊。
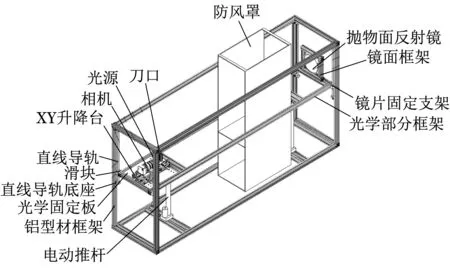
图1 大视场纹影系统总览Fig.1 Overview of large field schlieren system
1.1 光学部分设计
本设计将Z型光路简化,只保留一侧的抛物面反射镜,单反射镜离轴纹影系统光路如图2所示。将相机、刀口、狭缝、点光源等在一侧放置。光学部分局部放大图如图3所示。
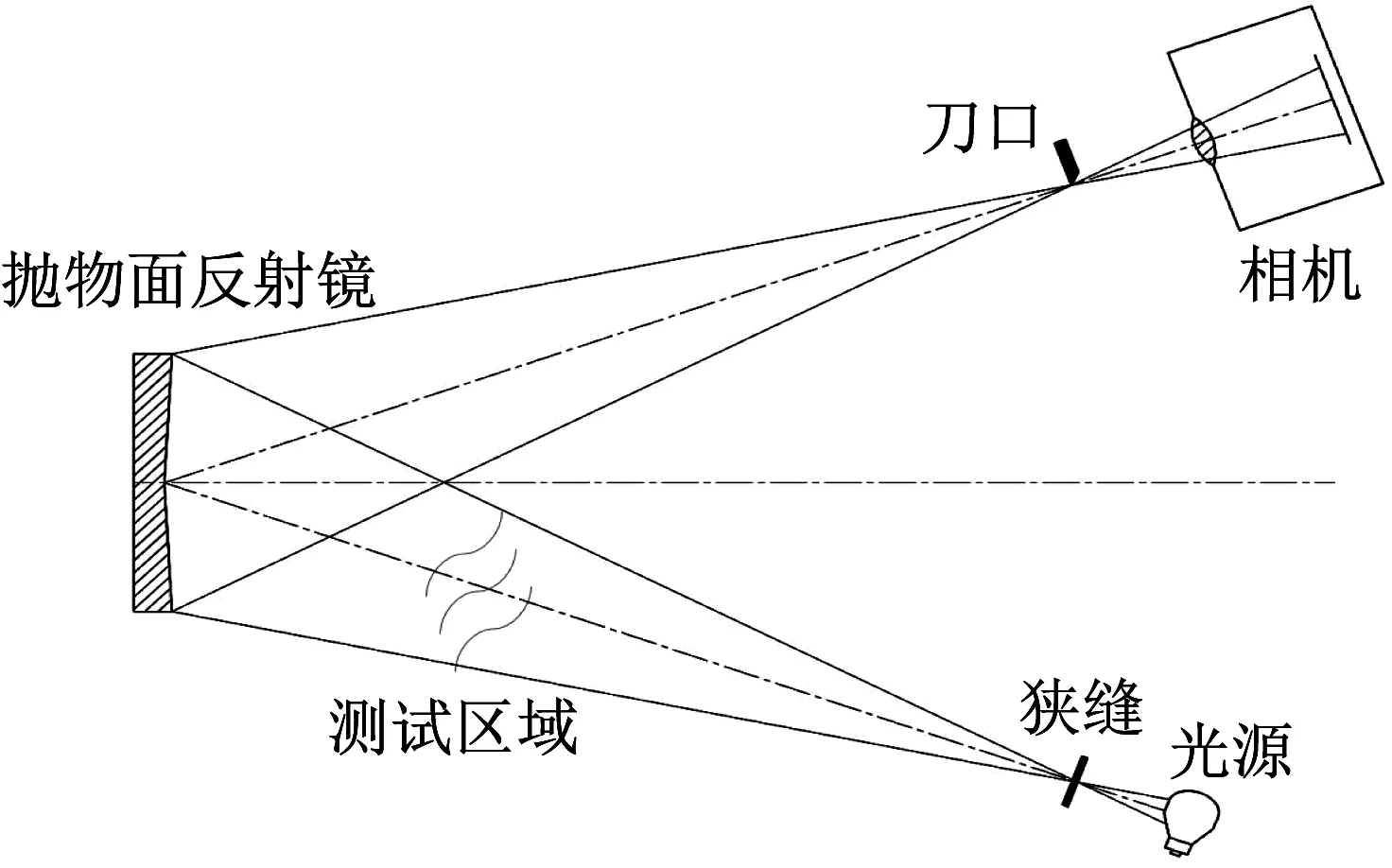
图2 单反射镜离轴纹影系统光路Fig.2 Optical path of off-axis schlieren system with single reflector
图3 光学部分局部放大Fig.3 Partial enlarged view of optical part
1.2 机械升降结构设计
机械升降部分主要由直线推杆、直线导轨和相关的连接件组成。
1.2.1 电机选型
电机一般有旋转式运动和直线式运动。为确保光学部分能够完成上下运动,采用直线推杆直接驱动实现光学部分直线运动。通过控制器输出电信号来控制直线推杆的运动速度以及运动行程。
1.2.2 机械升降结构设计
机械升降部分中,直线推杆顶部与光学部分底部采用螺栓连接。直线推杆在上升运动的过程中,由于推杆和外部套筒之间存在径向间隙,推杆的摆动变化幅度会随着伸长量的增加而增加。为保证运行过程时的直线度,在纹影系统框架的四角分别安装直线光轴导轨。
2 图像处理
图像处理系统的流程如图4所示。采用口径为150 mm的单片抛物面反射镜,光学部分活动范围为0~500 mm,流场可采集的区域为0~650 mm。采集从最低位置(0 mm)开始,光学部分每上升或下降100 mm完成一次成像,每上升或下降500 mm为1组实验。将单组实验获得的6张不同位置的纹影图像导入到图像处理系统中。先进行预处理,再对有效区域边缘进行识别,将纹影图像中的有效区域进行提取。将提取到的图像利用图像拼接技术进行全景合成,获得1张0~650 mm区域流场的可视化纹影图像。最后,导出全景图像并对图像中流场的面积、占比进行分析。
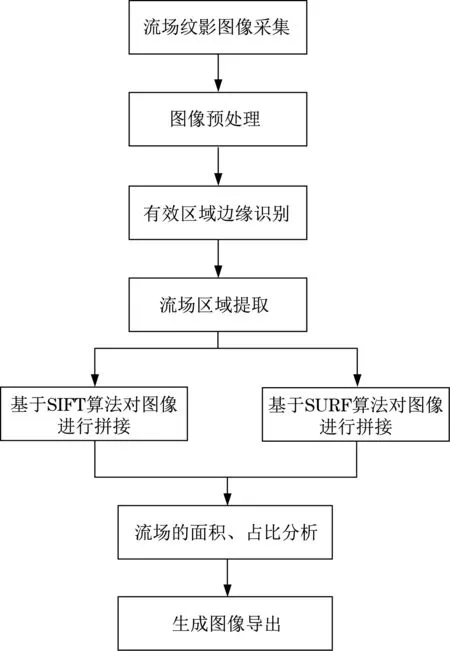
图4 图像处理系统处理流程Fig.4 Processing flow of image processing system
2.1 有效区域提取
纹影系统通过拍摄直接获得纹影图像。为方便后续处理,同时提高处理效率,需要将纹影图像的有效区域提取分离出来。
首先,使用形态学方法找到图像中的圆形边缘位置,最靠近图像左边缘的点和最靠近右边缘的点连接成圆的直径,中点是圆的中心[14]。通过扫描图像找到这2个距离左、右边缘位置最近的且灰度不为零的像素,分别定义为p和q,进而可求得圆心坐标位置和半径。实际求取过程中可能会由于采样间隔距离,找不到相应的像素点,影响算法优化的精确度[14]。此时可以选择取平均值来构造出p和q的坐标。在具体实现中,直接从第一行扫描,将当前距左边缘、右边缘最小的3个像素的坐标缓存。当遇到更小的点,之前缓存的数据将被替换[15]。最后,找到距左侧边缘最近的3个点p1、p2、p3,距右侧边缘最近的3个点q1、q2、q3,则可得出圆心坐标(x,y)和半径r分别为
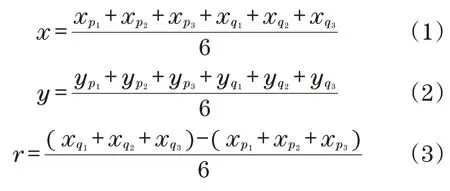
依据上述基本原理,可以将纹影图像中的有效区域进行提取,如图5所示。
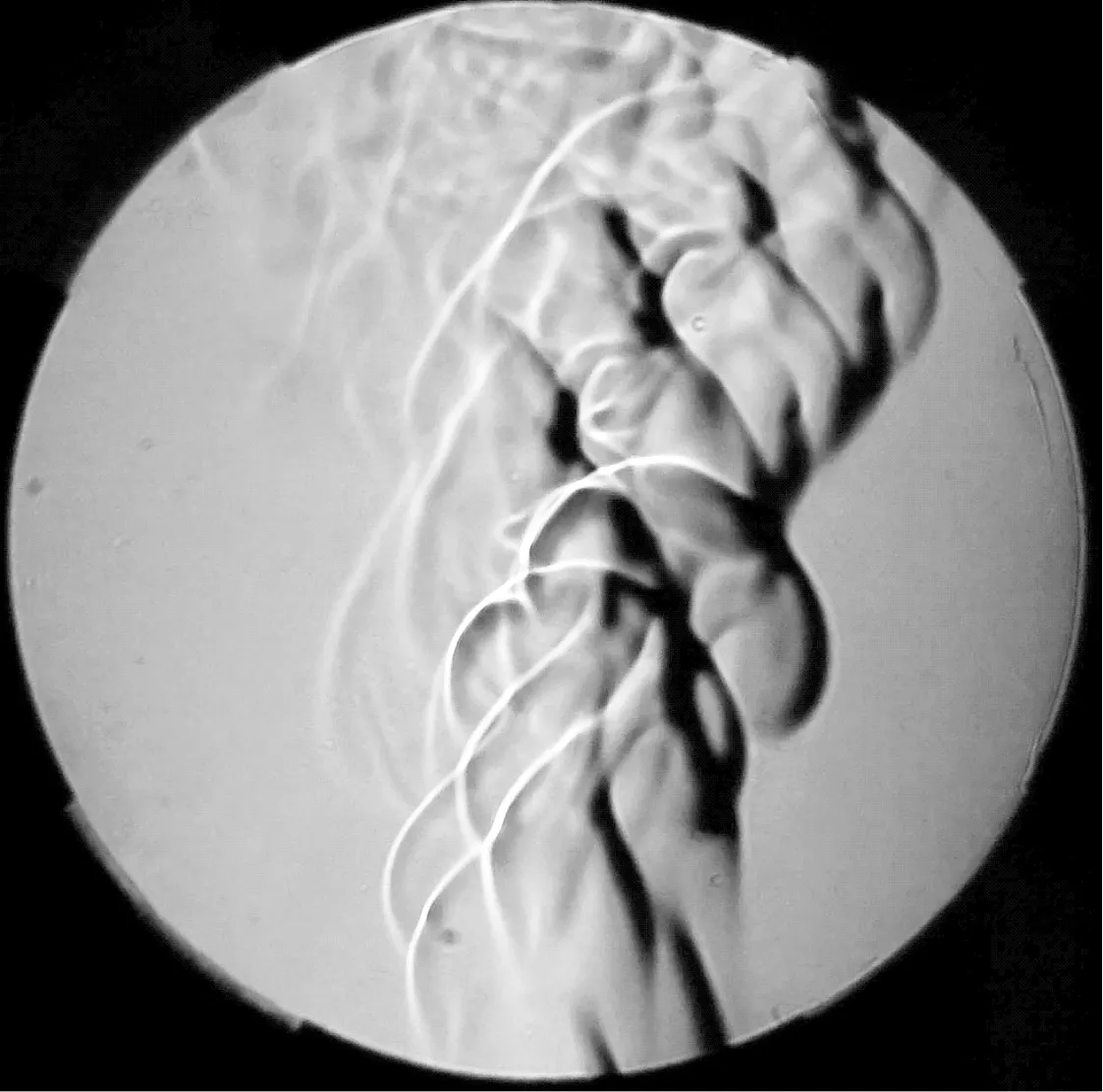
图5 对纹影图像有效区域进行提取Fig.5 The effective region of schlieren image is extracted
2.2 图像拼接技术
2.2.1 基于SIFT算法的图像拼接技术
SIFT特征是图像上的一些局部点,与图像大小无关,也与平移、旋转等变换因素无关,有很强的鲁棒性[16]。SIFT算法具体步骤包含特征点检测、特征点邻域内像素点的梯度计算、特征点的数据统计描述符建立,以及特征点集合的快速匹配计算[17]。尺度空间函数为L(x,y,δ),由可变尺度的卷积产生,高斯函数G(x,y,δ)[18],图像尺度空间的构造,是原始图像和高斯函数卷积而来,一般定义为

式 中:(·)为x和y的 卷 积 运 算;δ为 标 准 差;G(x,y,δ)被定义为

图像匹配是指借助一种映射函数之间的关系,将2幅图像的坐标点逐一对应[19]。投影变幻的矩阵,可以调整自由度,结果精确度高[20]。其矩阵式为
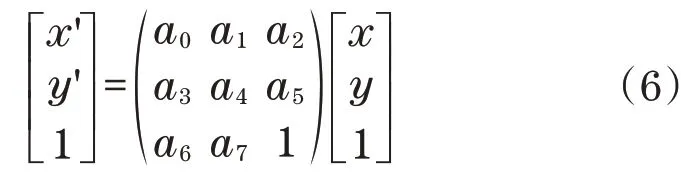
在图像的匹配过程中通常采用欧式距离(Euclidean distance),利用SIFT算法匹配后的纹影图像如图6所示。
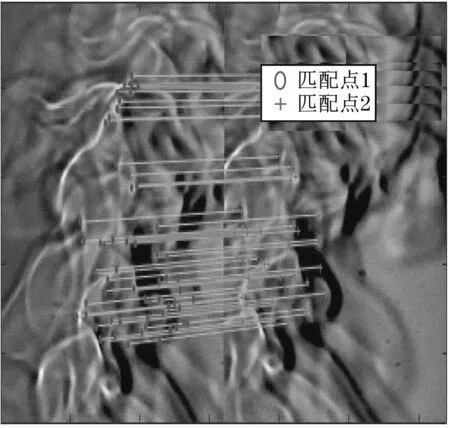
图6 基于SIFT算法匹配后的图像Fig.6 Image matching based on SIFT algorithm
2.2.2 基于SURF算法的图像拼接技术
SURF算法[21]具有鲁棒性、抗干扰性,还提高了特征提取的速度[20]。要利用SURF算法,首先,用Hessian矩阵检测极值点,获取特征点[22]。空间的任意一点(x,y),其对应的尺度空间为σ。Hessian矩阵式为

利用欧氏距离计算出2幅图像中相互对应的特征点之间的位置距离,当距离值小于设定的阈限值时,则判定这两特征点匹配正确。其中,阈值越小,匹配就会越精确稳定[23]。具体公式为

式中:Dij为待匹配图像上i点与原图像上j点两特征点之间的欧式距离;X为特征点坐标k为特征点的第k个向量。
使用直接平均融合算法,然后,求取平均值[24]。设待匹配 图 像 的灰度值为f1、f2、f3,则f1(x,y)、f2(x,y)、f3(x,y)对应图像在点(x,y)处的像素灰度值,其计算公式如下:
利用SURF算法匹配后的纹影图像如图7所示。
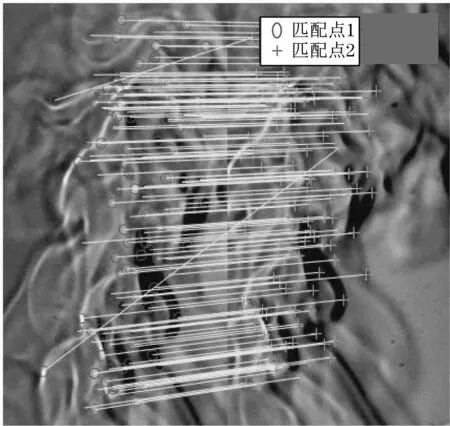
图7 基于SURF算法匹配后的图像Fig.7 Image matching based on SURF algorithm
2.2.3 算法匹配分析
针对SIFT、SURF这2种算法,对处理之后的纹影图像分别进行特征点提取、图像匹配实验。最后,对2种算法进行分析,见表1。
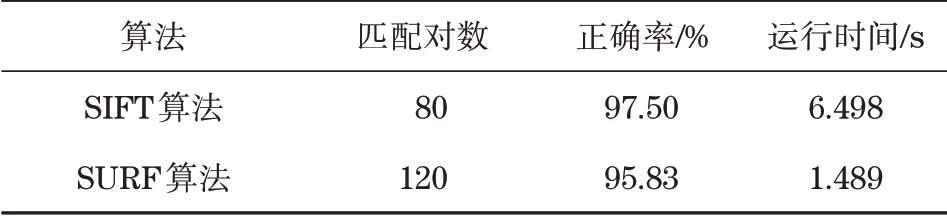
表1 SIFT算法与SURF算法对比Tab.1 Comparison between SIFT algorithm and SURF algorithm
结果表明:SURF算法匹配过程中,由于会出现误匹配点,匹配成功率低于SIFT算法,但SURF算法匹配过程中,运行速率要快于SIFT算法。
3 实验结果与分析
纹影系统通过SURF算法的图像拼接技术将0~650 mm流场范围内采集到的6张纹影图像进行全景合成,获得长条状的纹影图像,如图8所示。合成后的纹影图像中有效流场区域的占比更大,基本覆盖了目标流场的范围。后期,可结合计算机处理技术对图像进行降噪处理,进一步提升画质。针对目前流场接近稳态的相关研究,本系统基本能满足要求。
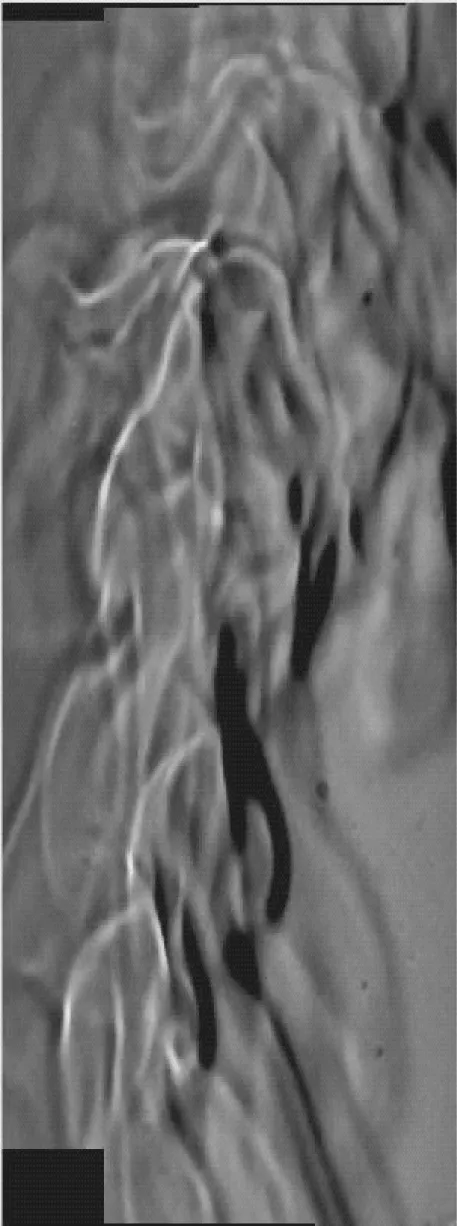
图8 基于SURF算法拼接的纹影图像Fig.8 Schlieren image mosaic based on SURF algorithm
4 结语
本设计结合计算机技术进行实验,运用SURF匹配算法实现大视场图像拼接。利用150 mm口径的抛物面反射镜光路完成650 mm的流场视野观测。相对于造价成本高昂的500 mm大口径的纹影系统,本设计获得的观测视野更广,观测结果也比较直观,且成本支出不足其5%。相关实验表明该系统具备小型化、低成本,但同样可以实现大视场流场观测的优点。基于图像拼接算法的纹影系统正处于发展阶段,还有很多需要完善的地方。例如,基于SURF算法合成的纹影图像有部分缺失,其流场的信息的完整性受到一定程度的影响。此外,由于纹影系统无法旋转,只能得到一个角度拍摄下的该系统相对于流场做上下运动的纹影图像。尽管有这些局限性,该系统凭借着小型化、低成本,但同样可以实现大视场流场观测的特点,仍具有广泛的应用前景。