基于SLAM技术的地下暗渠探测方法
2022-11-04朱德才吴凯华
彭 浩 朱德才 吴凯华
(广州市城市规划勘测设计研究院, 广东 广州 510060)
0 引言
河涌治理工作是大力推进生态文明建设的工作重点,河涌主要有两种:地表河涌和加盖河涌。地表河涌暴露地面之上,治理较为直观,加盖河涌也称为暗渠(下简称暗渠),在大城市中较为常见。由于城市发展加剧河涌污染,为减少污染对城市感官的影响,不少地区直接将河涌加盖变成暗涌,是河涌整治初期的产物[1]。随着社会的精细化管理需求,清楚地探测暗涌走向、边线、埋深等属性是暗渠治理或改造的关键所在。
1 现有技术背景
暗渠历史悠久,早期建设资料难寻,道路狭窄,部分地方交通繁忙,地下管线空间紧张,使得探测难度大幅增加,国内目前主要使用的探测方法:明挖法、三维激光扫描法、管道潜望镜检测法、闭路电视探测法[2]、蛙人潜入式方法及新型智能管涵检测机器人[3]等方式。明挖法施工及影像较大,本文不予采纳;智能管涵检测机器人目前尚不成熟,由于部分暗渠水量很低,淤积较多,检测船难以前进,经试验不予采纳;闭路电视用于探测管道内影像资料,无法获得准确坐标信息。
本文采用的方法有如下几种:
(1)管道潜望镜探测是一种进行管道快速检测的方法[4],利用可调节长度的手柄将高放大倍数的摄像头置于打开的暗渠窨井中,通过旋转伸缩杆,记录管渠中管道的实际情况。通过管道探测镜判断暗渠流向,以井盖为拐角点,根据开井处测量暗渠宽度、深度等信息,以暗渠宽度基本一致,埋深线性变化为规律初步画出暗渠边线[4]。此种作业方式存在如下问题:①对于无井盖区域或者井盖之间出现非直线暗渠极易出现误判;②暗渠宽度基本一致或埋深线性变化的规律,并不适合于所有情况(如暗渠宽度、埋深骤变,暗渠小口接大口或者暗渠一分为二等情况)。由于可视化特征,适用于迅速直观地判断暗渠走向,通过相对位置判断暗渠边线,精度较低,可作为一种定性的手段。
(2)地质雷达探测是一种适于在城市开展的地球物理探测方法,在城市浅层勘探中取得了良好效果。此技术的作用在于通过雷达发射波纹特征,来判断暗涌边线位置、边壁厚度[5-7],结合管道内窥镜方式,确认边线和走向的正确性。此种方法随着暗渠埋深的加大易出现粗差,对于埋深较深的暗渠,探测能力较差,内业数据处理较为复杂,地表需平整(具备作业环境),适用环境受到限制。
(3)蛙人潜入式探测方法是一种人工穿戴专业潜水服,通过暗渠开口处或井盖处下潜,人工布设金属导线至暗渠边缘,通过地面电磁探测设备获取暗渠边线的方法。此方法探测距离远,细节丰富,精度相对较高,但由于暗渠水深普遍随暴雨天气变化,暗渠水流较急,淤积严重,内有刺激性或有毒气体,测量危险性较大[8];且部分暗渠空间狭小,蛙人无法下井作业,故投入的人力、物力较多,对安全生产方面也有有较高的要求。
2 新技术作业方法
根据上述应用场景特点,综合考虑优劣势,提出一种以基于同步定位与绘图(simultaneous localization and mapping,SLAM)激光扫描技术为主的作业方式,可在移动过程中采集数据[9-12],能适应绝大部分暗渠探测的环境需求。基于SLAM技术的三维激光扫描技术,能在快速移动中获取场景的高精度特征点位[13-16],本方法采用SLAM扫描仪搭配连接杆,可适应于人无法进入的复杂场景情况,无须传统的蛙人下井作业,避免了人员伤害和仪器财产损失的事故;相对精度较高,大大提高了测量效率;在同样作业周期内提供的信息量较传统作业方式剧增,为水环境治理工作提供了重要基础数据,也为后期暗渠运维工作提供强大技术支撑,具体技术方案见图1。
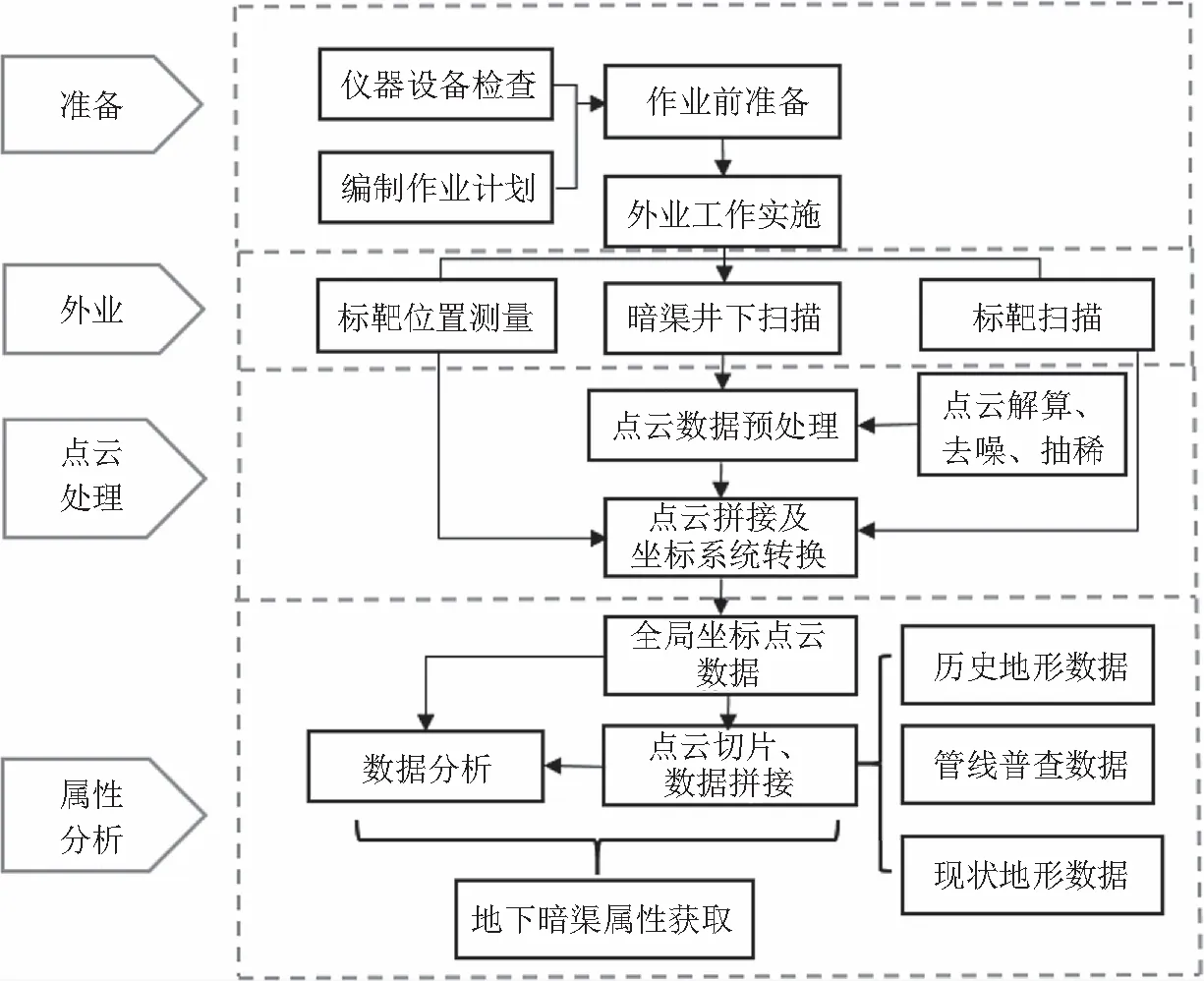
图1 技术方案流程
3 项目实践
3.1 项目概况
根据广州市总河长令要求,全面消除黑臭小微水体,以排水单元划分为抓手,做好单元内雨污分流和合流暗渠升级改造工作,其中地下暗渠属性探测是工作重点。天河区全域范围约137 km2,地下暗渠里程约120 km,暗渠形态多样,地表环境复杂(部分跨房、路、桥等情况),对探测手段提出了新的要求。
3.2 项目准备
本项目采用GEOSLAM zeb-horizon手持式三维激光扫描仪,测程100 m,扫描噪音3 cm。搭配自制连接杆,可深入井底采集特征点位信息。
考虑到探测对象不可视特性和SLAM激光扫描本身技术要求,作业前准备主要分为以下三个部分:①搜集测区现有暗渠走向、井盖位置资料;②搜集测区现有地形图资料;③根据已收集暗渠井盖资料,结合地形图,制定作业计划(布设控制点位置和SLAM扫描仪外业采集路线)。
3.3 项目外业
根据项目所采用SLAM扫描仪技术特点,单次扫描时长受限(单次扫描时长不宜大于20 min),单次扫描点云配准至少需4个标靶点(控制点精度自检,便于后续点云整体配准工作),需提前安排好扫描路线,避免出现扫描时长超限或者标靶点过少、分布不均匀等情况,提高作业效率。
3.3.1标靶点测量
SLAM激光扫描仪所输出点云数据需采用地面设置标靶点方式,将点云转换至广州2 000坐标。项目采用广州连续运行参考站(Guangzhou continuously operating reference stations,GZCORS)技术测量标靶点三维坐标,需注意的是标靶点需在扫描范围内均匀布置,严禁分布成一条直线,影像点云配准结果。
3.3.2目标扫描
外业工作由5人小组具体负责。其中,2人负责SLAM激光扫描仪操作,1人负责前行开井盖便于扫描,1人负责后行关井盖避免安全事故,剩余1人负责在已布设控制点位上放置标靶纸及回收标靶纸。
按照计划扫描路线前进,负责开井、关井人员还需注意扫描范围内不可预估危险因素,在公路边、跨桥、人群嘈杂区域,需认真做好作业标志,避免点云成果中噪声过多或发生安全事故。
具体采集过程中注意事项如下:①按照计划路线匀速前进,扫描仪头部探入井口需缓慢、谨慎,避免SLAM算法解算出错造成外业返工;②扫描仪探头深入井下后需停留15~20 s,充分采集井下特征信息后缓慢拉起;③在每个扫描段中尽量有4个及以上标靶点坐标,若受限于环境无法满足,则相邻两端尽量重复扫描部分区域,通过点云拼接方式将两段点云合并成一段再行配准。
3.4 内业数据处理
内业数据处理包括点云去噪、抽稀、点云配准、点云拼接等步骤。
3.4.1点云解算
通过将设备原始文件导入三维扫描仪数据处理软件(GEOSLAM HUB)中,设置合理解算参数,输出通用格式点云数据(.LAZ或者.LAS)。
基于SLAM算法和采集数据的特殊性,对相邻时态数据的判断易出现偏差,导致点云解算结果呈现错层、扭曲、重叠或解算失败的现象。基于上述现象,可采用如下方式处理:
(1)调整解算软件的算法参数。①收敛阈值,增加阈值即增加了SLAM算法试图匹配重叠区域内数据的次数,对于采集数据过程中出现漂移现象合适;②解算立体像素密度,控制SLAM使用的解算像素的大小,在狭窄隧道的洞穴和矿井中,调大立体像素密度,以便更多的细节可以在近距离使用;③IMU和SLAM算法的权重,若数据在移动过程中速度较快或场景中特征点较小(建筑物走廊、隧道等)可将权重向IMU算法倾斜。
(2)舍弃部分错误数据。SLAM的算法处理相邻两帧点云的重合、变换,基于迭代就近点法(iteration closet point,ICP)实现两帧点云的配准。由于存在点云漂移,导致点云解算结果出现偏差,一般集中在部分时间段内,可从解算参数上设置剔除某个时刻之后的数据,最大限度上利用数据,避免返工。
(3)外业补测。对于上述方法尝试均未果的情况,则需外业返工重新采集数据。
3.4.2点云去噪、抽稀
为获得更纯净的点云数据,提高内业作图精度,需对解算点云去噪、抽稀处理。去噪、抽稀功能集成在软件内,去噪效果如图2所示。
(a)去噪前 (b)去噪后
3.4.3点云配准
通过上述软件解算、去噪、抽稀生成的三维点云模型需通过标靶点将其转换至广州2000坐标系下,便于暗渠边线等属性分析。标靶点通过反射强度与一般地物区分开,利用第三方配准软件(Realworks等)将标靶点坐标刺入[17],形成广州2000坐标系下的点云数据。
3.5 属性分析及数据成果
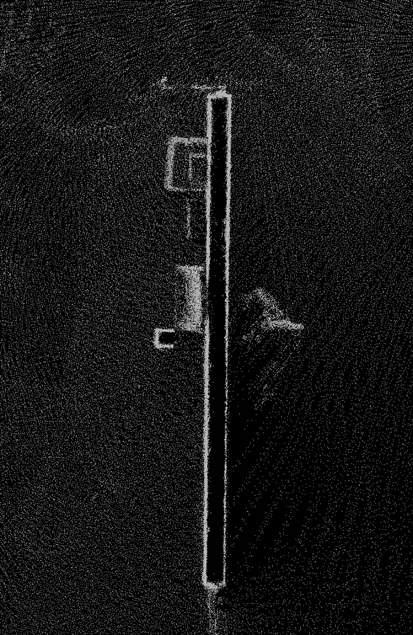
地下暗渠属性主要包括流向、边线位置、埋深、接口等信息。以已配准点云数据为主,结合历史地形图、现有管线普查数据进一步核实,形成标注属性的二维线划图,如图3所示。

(a)点云
将上述采集暗渠信息按照数据结构入库,以属性表形式记载信息,形成数据库成果。
3.6 精度检测
由于地下暗渠不可视,对于两端暴露出入口可采用量数、全站仪采集特征点判断暗渠属性精度指标,对于中段不可视区域,一般通过地上房屋边长、角点与碎部点采集数据和丈量房屋边长数据对比,以此判断地下暗渠精度情况。由图4可知,特征点位中误差为0.12 m,边长较差中误差为0.05 m,完全满足地下暗渠探测项目需求。
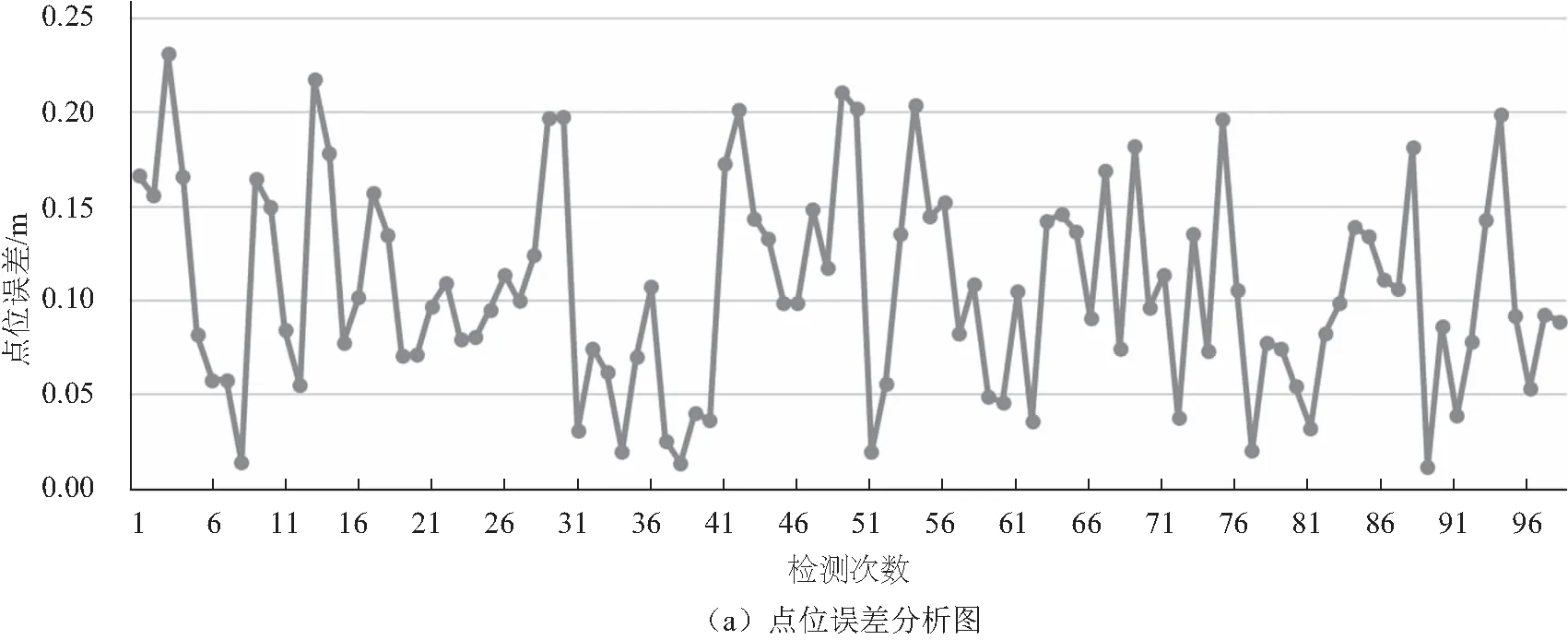
图4 暗渠摸查精度分析
4 适用性分析
城市暗渠探测主要存在以下困难:①暗渠周边环境复杂,部分存在非法搭建、不正当施工现象影响探测;②部分暗渠埋深大、弧度转角、瀑布型转角等情况复杂;③暗渠宽度、净空不一,大部分暗渠缺乏人工进入条件。
基于SLAM三维激光扫描技术的作业方式,对比QV镜探测、地质雷达探测、蛙人潜入式探测等方法可最大限度地提高探测效率,降低人工成本,更适应地下暗渠狭小、深埋等人不可进入的作业环境;经检测,特征点位中误差为0.12 m,边长较差中误差为0.05 m,能完全项目需求;一次性采集渠箱内部特征信息,快速捕捉暗渠接口,为监管部门后续暗渠改造、水环境治理提供基础数据。
5 结束语
基于SLAM三维激光扫描技术作业方式,可在移动过程中采集数据,通过外配连接设备,能深入人不可达、狭小等区域,能适应绝大部分暗渠探测的环境需求。同时也存在如下问题望后期解决。
(1)对相邻时序状态的识别和整个场景的回环检测误差,是SLAM扫描的技术要点,针对地下暗渠场景单一、重复、特征性不强等特点,易发生误判或解算失败的情况,往往需要外业返工采集数据,影响效率。
(2)激光扫描测程有限(此项目所用设备测程100 m),目标越远点云越稀疏,对于长段无井盖或大范围房屋压盖的地下暗渠,需依靠多种探测手段结合多源资料综合判断,必要时需采用人工开挖方式制造井盖,上述方式成本高、工期长、存在一定的协调难度。
