发那科机器人3D 视觉快速标定方法
2022-11-04何家恒
何家恒
(广州市技师学院,广东广州 510000)
发那科自主分拣机器人能够从繁杂的物品中,挑选出需要挑拣的物品然后将其放置到分拣区域,比如将圆柱体放在较近的一侧,方体则放在较远的一侧。
1 快速标定方法应用意义
工业摄像机放置在机器人末端执行器上的工作场所,如果要建立摄像机图像坐标系与机器人基本坐标系之间的关系,必须使用标定算法来获取摄像机坐标系与机器人坐标系之间的关系。天津工业企业发展研究院教授李金忠采用蔡氏二动法对整个系统中的摄像头进行标定。在标定工作流程中,摄像机位于工业机器人末端,智能机器人内部控制摄像机在固定位置分析采集标定板上的图像数据,从而完成摄像机的标定。将获得的摄像机位置参数与工业机器人位置参数相对应,从而完成工业机器人的手眼标定。华北电力大学段健利用针孔建模原理和Matlab 相机标准工具箱对镜头内外参数进行标定。根据相机镜头内部可能存在的畸变,西安理工学院王小华教授制定畸变的校正方案,分别求解畸变中心和畸变系数,并采用福杰拉斯校正法标定镜头内部参数。通过大量的文献研究,在精度不是很高的情况下,利用2 组图像点和机器人坐标点,可以快速获得摄像机2 点标定方法的唯一解。然而,由于图像采集与识别、机器人运动误差等因素,仅取2个控制点进行系统标定,对精度要求较低。因此,本文利用机器人系统的通信功能,多次触发摄像机在机器人末端执行器的摄像机平面内拍摄目标区域,然后由机器人程序记录多组图像点和机器人坐标点。引入标定图像点与机器人坐标点之间的相关因子,编写相关机器人程序自动计算标定关系,大大提高了标定速度、便捷性和准确性[1-3]。
2 系统概述
视觉系统(3DL)主要是通过视觉系统软件设置,建立视觉画面上的点位与机器人位置相对应关系。对工件进行视觉成像,与已标定的工件进行比较,得出偏差值,即机器人抓放位置的补偿值。
在接收到信号后,工业机器人的工作方式实际上是进行系统控制。首先,系统要在工业机器人和计算机之间建立公共信号通道,然后在计算机设定程序的帮助下控制机器人的运行路线。工业机器人整个系统的控制过程为:由工业机器人抓取待分类的物料,并将其放在系统确定的对象放置槽里;系统记录对应于每个工件的空间坐标的全局总变量;使用软件编程语言(选择计算机的VC++6.0 系统)来编写机器人控制程序软件,然后控制工业机器人进行分拣操作。 在分拣机器人的控制系统中使用了许多接近传感器,其通过接口电路连接到单片机引脚。操作过程中,通过读取这些传感器检测到的信息,就能查看到分拣机器人的工作状态。这些接近传感器只有2 种模式,即未触发时的高电平模式和触发时的低电平模式,因此,只需要读取相应引脚的电平。具体来说,为了确保其正常运行,在分拣机器人启动后,首先进行网络连接状态、机械臂复位和转盘复位等方面的自我检查。在确保自检正确后,机器人将从起点开始,到达识别区域后启动机器视觉模块来识别物件。成功识别快递物品后,机械手将其放入转盘,然后分拣机器人将对象运输到倾卸区,最后返回识别区。直到目标对象分拣完成后,该循环才会停止。
3 发那科分拣机器人3D 视觉系统的快速标定方法
3.1 发那科机器人需使用的软件
发那科机器人需使用的软件如下:1A05B-2500-J868 iR Vision Standard、1A05B-2500-J869 iR Vision TPP Ⅰ/F、1A05B-2500-J871 iR Vision UⅠF Controls 、 1A05B-2500-J900 iR Vision Core 、1A05B-2500-J902 iR Vision 3DL。
3.2 3D 视觉系统相机的安装
分拣工作的首要内容之一是相机的标定,与此同时相机标定也是机器视觉的重要组成部分。如果没有摄像机校准,机器人的机器视觉将无法实现。在应用机器人分拣技术的过程中,相机标定的主要功能是建立专属的物体图像坐标系,并且依照空间位置情况将整个坐标系连接起来。在相机标定的作用下,机器人分拣系统可以更加正确地对物体的位置进行判断,从而更好完成物体的抓取工作。3D 视觉系统相机安装在固定的架子上,如图1 所示。
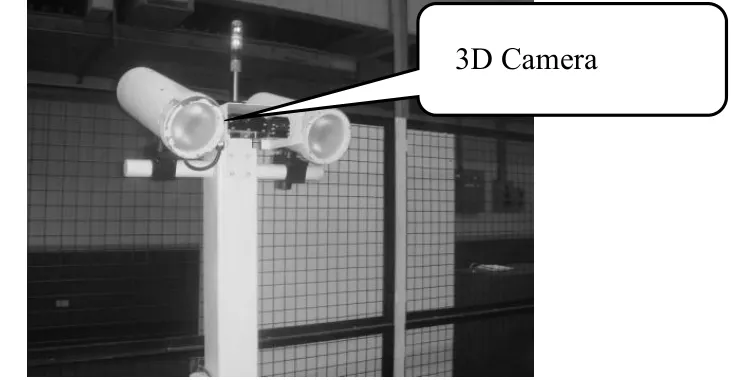
图1 3D Camera
3.3 视觉系统设置
3.3.1 机器人与电脑连接
机器人与电脑ⅠP 设置如表1 所示。连接完毕后,在ⅠE 地址栏中输入172.168.0.2,进入Camera Setup Tools 界面。
表1 机器人与电脑连接设置
3.3.2 Camera Setup Tools 设置
在ⅠE 浏览器中点击Vision Setup(视觉设置),然后再点击Camera Setup Tools(摄像头设置工具),选取DL3 为3D 摄像头设置界面。点击DL3 Camera Setup Tools,双击DL3,进入DL3Camer Setup 界面,如图2所示。
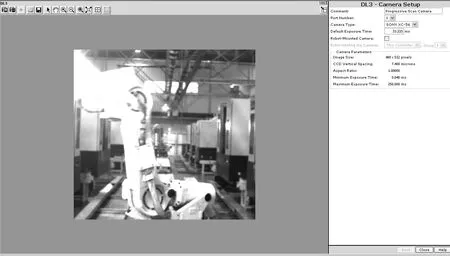
图2 DL3 Camera Setup 界面
3.3.3 Camera Calibration Tools(摄像界面头标定)设置
在ⅠE 浏览器172.168.0.2 主界面,点击Camera Calibration Tools(摄像头标定),选择CALⅠB3DN 对3D 摄像头进行标定。双击CALⅠB3DL 进入设置界面,由于3D 摄像头固定于架子上,没有安装在机器人手爪上,因此Calibration Grid(3D 用示教板)会安装于手爪上,选择Yes,表示标定板会随机器人移动[4]。3DL标定设置如图3 所示,设置需选取Calibration Grid Frame(六点法),保证标定准确性。
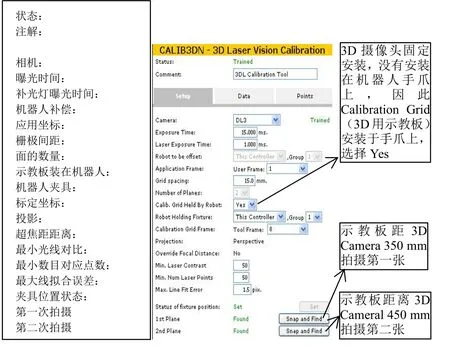
图3 CALⅠB3DN
3.3.4 3DL Calibration 设置
标识别主要是依照所需要抓取的图像信息,也就是对目标信息进行提取或者是进行图像分割。在基本定位中,对图像的特征或者是某些特征进行提取。特征提取方式有很多种,比如进行边缘检测或者区域提取及阈值分割。在完成目标提取之后再进行目标分割,并且要对项目的特征实施分类和统计。
在Laser Vision Calibation 界面,设置Calibration Grid Frame(标定坐标),具体步骤如下:点动移动机器人,将固定在机器人上的示教板移动至与3D Camera相距350 mm 处,点击1 st Plane(第一次拍摄)/[Snap and Find](拍照并标定)按钮;点击[OK]按钮,记录1号位置数值;点动移动机器人,将固定在机器人上的示教板移动至与3D Camera 相距450 mm 处,记录2号位置数值,记录1 号位置数值,至此3DL 标定完成[5],如图4 所示。

图4 标定板标点完成
3.3.5 Vision Process Tools 设置
在ⅠE 浏览器172.168.0.2 主界面,点击Vision Process Tools(视觉处理工具)设定,选择PRO3DLN即打开3D 摄像头设置界面3DL Signal Vision Process(3D 视觉信号处理界面),如图5 所示。

图5 视觉处理信号设置
在3DL Signal Vision Process(3D 视觉信号处理界面)设置参照位置、3DL 匹配度设置,分别如图6、图7 所示。

图6 参照位置
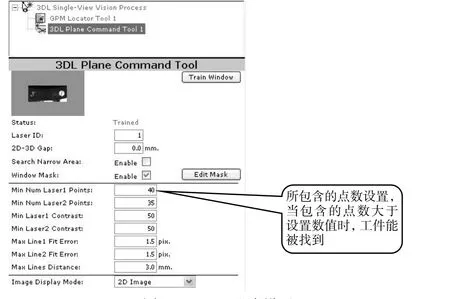
图7 3DL 匹配度设置
在3DL Plane Command Tool(3D 平面工具)设置界面,设置摄像头1 的图像最小匹配度、摄像头2 的图像最小匹配度、摄像头1 的图像最小对比度及摄像头2 的图像最小对比度,当拍摄画面包含的点数大于设置数值时,工件就能被找到[6]。
3.4 目标分拣
目标是移动的所进行的跟踪和记录,可运用多目标跟踪的方式,对所提取到的图像序列进行逐个分析。在图像中的每一帧中对运动目标进行检测,并且要对图像中所要识别的像素类型进行逐步判断,之后建立目标链。在对物品进行判断的过程中,可以利用物品和机器人所建立的坐标系中的联系,完成分拣工作。
4 结论
对于摄像机固定、机器人末端执行器移动的场景,本文主要利用发那科分拣机器人3D 视觉系统的通信和服务功能。通过触发摄像头对标定板于350 mm、450 mm 处拍照,拍摄机器人末端执行器标定板的定位信号,利用机器人应用程序的快速标定。建立标定图像点与机器人坐标的对应关系,并编制相关机器人程序,自动计算标定位置的相关影响因素。通过可靠性试验,证明改进后的方法计算的工件位置误差远远小于传统2 点法计算的误差。
