具有输入时滞的集群无人机事件触发协同最优控制
2022-11-02陈谋,吴颖
陈 谋,吴 颖
(南京航空航天大学自动化学院,南京 211106)
近年来,集群无人机协同控制因其具有分布并行感知、计算和执行能力,更好的容错性和鲁棒性得到了业内的广泛关注[1-3]。针对受输出死区和执行器故障影响的多旋翼无人机,文献[4]提出了一种自适应姿态协同控制策略。文献[5]提出了一种无人机系统分布式自适应差分进化目标跟踪控制方法。文献[6]针对带有执行器故障和输入饱和的集群无人机系统,设计了一种分布式容错协同控制策略。然而,在实际系统应用中,无人机在复杂任务和不确定性影响下,要求无人机群能够以一种最优控制方式完成目标探测、识别,并进行目标分配、任务规划等。
由于神经网络具有良好的逼近和学习能力,自适应动态规划成了处理非线性系统最优控制问题的重要方法之一。近年来涌现了大量关于神经网络强化学习优化控制的研究成果[7-9]。例如,文献[10]提出了一种执行-评判-辨识神经网络框架,用于逼近哈密顿-雅可比-贝尔曼(Hamilton-Jacobi-Bellman,HJB)方程,以获得不确定非线性系统的最优控制方案。针对单输入单输出非线性严格反馈系统,文献[11]基于强化学习算法提出了一种反步优化控制方法。文献[12]针对车辆云系统,提出了一种基于半马尔可夫决策过程和强化学习算法的自适应云资源分配模型。然而,集群无人机的分布式协同自适应最优一致性控制问题还需进一步深入研究。
另一方面,对于集群无人机协同控制问题,如果一架无人机进行周期采样,并将采集的数据实时传输给其邻居无人机,一旦传输的数据量太大,在信道容量受限的情况极有可能导致通信阻塞,从而影响集群无人机系统的控制性能。因此,事件触发策略作为减少通讯资源浪费的有效途径之一引起了众多学者的关注[13-17]。文献[18]提出了一种事件触发协同无迹卡尔曼滤波控制策略,并且将该策略在集群无人机系统中进行了应用。文献[19]针对无线网络控制系统,设计了一种周期事件触发采样和双速率控制问题,并将其应用于多无人机系统。文献[20]提出了一种基于认知无线电网络的无人机事件触发输出反馈控制切换方法。然而,值得注意的是,事件触发阈值的设计可能会影响集群无人机系统的控制性能,因此在协同控制器设计的时候需要考虑基于系统控制性能的事件触发策略以减少通信资源的浪费,同时尽可能减少对系统控制性能的影响。
基于以上分析,本文针对受外部干扰和输入时滞影响的集群无人机系统,研究了动态事件触发协同自适应最优神经网络控制问题。对于六旋翼集群无人机系统,基于最优反步控制技术,本文提出了一种最小能量损耗的协同自适应控制方案。此外,将事件触发控制算法融入本方案以减少执行器的机械磨损,进而利用更少的成本获得系统控制目标。同时设计了一种考虑系统一致性控制性能的动态事件触发策略,该策略包含一致性误差,可以在尽可能降低对一致性控制性能影响的同时,减少通信资源的浪费。此外,所设计的考虑系统控制性能的动态事件触发策略可以排除Zeno 行为。
1 问题描述与预备知识
1.1 系统建模
本文考虑如下六旋翼无人机的位置模型[21]

时滞现象[22-24]普遍存在于各种系统中。在无人机飞控系统中,各种传感器复杂的数据计算和数据测量都会导致时间延迟。时滞的存在可能导致控制信号无法及时控制系统状态,导致无人机无法达到理想的控制效果,甚至造成事故。另外,无人机在复杂环境飞行过程中不可避免地会遇到强非线性以及未知干扰等问题。基于上述分析,本文考虑了在系统不确定、输入时滞以及外部干扰影响下的六旋翼无人机系统,并且基于式(1),第i个六旋翼无人机的位置系统模型可转化为

式 中;li,h=1m i;τh>0 是 已 知 的 常 数 时 延;pˉi,h2=[pi,h1,pi,h2]T∈R2(h=1,2,3) 表 示 状 态 向 量;pi,11=xi,pi,21=yi,pi,31=zi,pi,12=vxi,pi,22=vyi,pi,32=vzi,vx、vy和vz表 示 线 速 度 变 量;gi,h1(pi,h1)表 示 无 人 机 系 统 建 模 过 程 中 忽 略 的 非 线性 部 分;gi,12(pˉi,12),gi,22(pˉi,22)和gi,32(pˉi,32)分 别 包含ψ1x˙i/m,ψ2y˙i/m和ψ3z˙i/m以及建模过程中忽略的非线性部分,并且di,h(t)表示邻居无人机j和外界因素对无人机i产生的总干扰;yi,h是六旋翼无人机系统的输出。另外六旋翼无人机系统的纵向,横向以及高度通道的控制输入信号分别为ui,1=(cosφisinθicosφi+sinφisinφi)Mi,ui,2=Mi(sinφisinθicosφi-cosφisinφi) 和ui,3=(cosθicosφi)Mi-mi g。根据文献[21],可以反解出期望的姿态角如下

1.2 问题描述
对于系统控制输入信号ui,h,从图1 可以看出ui,h=ui,h1+ui,h2,其 中ui,h1表 示 反 馈 控 制 信 号,ui,h2表示前馈干扰补偿控制信号。首先对于反馈控制通道,为了降低控制器更新的频率进而减少资源损耗,本文引入了如下考虑一致性控制性能的动态事件触发机制

图1 六旋翼无人机自适应事件触发控制方案示意图Fig.1 Diagram of adaptive event-triggered control scheme of six-rotor UAVs

式中:ωi,h(t)=ui,h1(t)-υi,h(t)表示当前反馈控制输入信号υi,h(t)与采样反馈控制输入信号ui,h1(t)的 差 值。κi,h、ζi,h、εˇi,h、cˇi,h1和cˇi,h2为 待 设 计 的 正 参数;ei,h1为系统的一致性误差。此外,从式(6)可以看出,对于给定的初值βi,h(0)∈(0,1),可以得到对于任意的t≥0 有βi,h(t)∈(0,1)。另一方面,从式(5)可以看出,本文在传统的事件触发策略基础上加入了关于一致性控制性能的调节项,可以在减少资源损耗的同时尽可能减少对系统控制性能的影响。
本文的主要目的是针对复杂环境下六旋翼无人机飞行过程中遇到的不确定性、未知干扰、资源受限以及输入时滞等问题,设计一种基于动态事件触发的最优分布式协同神经网络控制策略以实现如下控制目标:
(1)集群六旋翼无人机系统中所有信号都是半全局一致最终有界;
(2)每个六旋翼无人机能够实现一致性控制;
(3)对于考虑系统控制性能的动态事件触发策略,可以证明不存在Zeno 行为。
为了达到预期的控制目标,需要满足如下假设条件:
假设1[21]从根节点到其他所有节点至少有一条有向路径,有向图包含以节点0 为根的生成树。
假设2[25]长机的动态yd,h及其一阶、二阶导数动态均有界。
假 设3[25]假 设 外 部 干 扰di,h(t)及 其 一 阶 导数是有界的。
2 自适应动态事件触发协同最优控制器设计和稳定性分析
2.1 自适应动态事件触发协同最优控制器设计
对于受外部干扰和输入时滞影响的六旋翼无人机系统,本节将基于强化学习和反步控制技术,设计一种分布式自适应动态事件触发协同优化控制器来确保闭环系统的稳定性。此外,为了解决输入时滞问题,在传统坐标变换的基础上加入了积分项来补偿其对系统性能的影响。为了实现控制目标,定义如下一致性误差和坐标变换

式 中:ei,h1和ei,h2为 误 差;α^*i,h1为 待 设 计 的 中 间 控 制信号;ai,j表示各个跟随无人机之间进行信息交互关系的权值,如果权值ai,j>0 表示无人机i可以接收到无人机j的信息,否则,ai,j=0;ai,0表示跟随无人机与长机之间信息交互关系的权值,如果权值ai,0>0 表 示 无 人 机i可 以 接 收 到 长 机 的 信 息,否则,ai,0=0。


受文献[11]中所介绍的优化控制算法启发,评判神经网络的权值更新律可以设计为



式 中ci,h12>0,μi,hc2>0,μi,ha2>1 2,μi,hg2>0 和θˇi,h2>0 是 待 设 计 参 数,并 且μi,hc2和μi,ha2的 关 系 满足μi,hc2>μi,hc2>μi,ha22。
为了补偿外部干扰对六旋翼无人机带来的影响,设计以下干扰观测器[25]

式中:D^i,h为Di,h=di,h+( 1oi,h)σi,h2(pˉi,h2)的估计;δ^i,h2为 权 值δi,h2的 估 计。考 虑 式(41,42),整 理可得

2.2 稳定性分析
集群六旋翼无人机系统的事件触发协同最优控制闭环系统稳定性结论可归纳为如下定理。
定理1 基于给出的假设和设计的动态事件触发机制式(4~6),对于受输入时滞和外部干扰影响的六旋翼集群无人机系统,按式(37~45)设计每个六旋翼无人机的最优控制信号、权值更新律和干扰观测器,则可以得到以下性质:
(1)集群六旋翼无人机系统中所有信号都是半全局一致最终有界;
(2)每个六旋翼无人机系统的输出能够实现一致;
(3)对于所设计的动态事件触发机制,闭环系统不存在Zeno 行为。
证明
步骤1 根据积分中值定理[26],可以得到






3 验证结果
基于图2 中给出的通信拓扑图,给出仿真结果来验证所提出控制方案的有效性。

图2 通信拓扑图Fig.2 Communication topology
长机的轨迹定义如下

六旋翼无人机系统未建模的部分定义为gi,h1(pi,h1)=0.5sin(pi,h1),gi,h2(pˉi,h2)=-sin(pi,h1)+0.2pi,h2,机身质量m=2 kg,空气阻力系数ψh=2,并且外部干扰选定为di,h=0.5sint。接下来定义如下 参 数:ω~1,h1=ω~3,h1=ω~1,h2=ω~3,h2=38,ω~2,h1=ω~4,h1=ω~2,h2=ω~4,h2=156;μi,hg1=15,μi,hg2=1,μi,hc1=0.6,μi,hc2=0.4,μi,ha1=0.8,μi,ha2=0.6;τh=0.514;cˇi,h=2;κi,1=κi,2=1,κi,3=2;ζ1,1=ζ3,1=ζi,2=ζ1,3=ζ3,3=0.8,ζ2,1=ζ4,1=ζ2,3=ζ4,3=1;εˇi,h=0.2。
变量的初值选择为pi,1(0)=[0,-1,1]Tm,pi,2(0)=[0,-1,1]Tm/s,δ^i,hc1(0)=δ^i,hc2(0)=[0.4,0.4,0.4,0.4,0.4,0.4]T,δ^i,ha1(0)=δ^i,ha2(0)=[1.2,1.2,1.2,1.2,1.2,1.2]T, 并 且δ^i,hg1(0)=δ^i,hg2(0)=[0,0,0,0,0,0]T。图3~8 为 仿 真 验 证结果。图3 为六旋翼无人机的3 维跟踪轨迹图,可以看到一致性控制性能得以实现。图4 为跟随者无人机和长机的输出图。图5 是每架六旋翼无人机的总推力轨迹。图6,7 是自适应更新律的轨迹。图8 为触发时刻图。从图8 中可以看出,六旋翼无人机系统中所有信号都是半全局一致最终有界的,六旋翼无人机系统的输出能够实现一致,并且通讯资源得以节省。
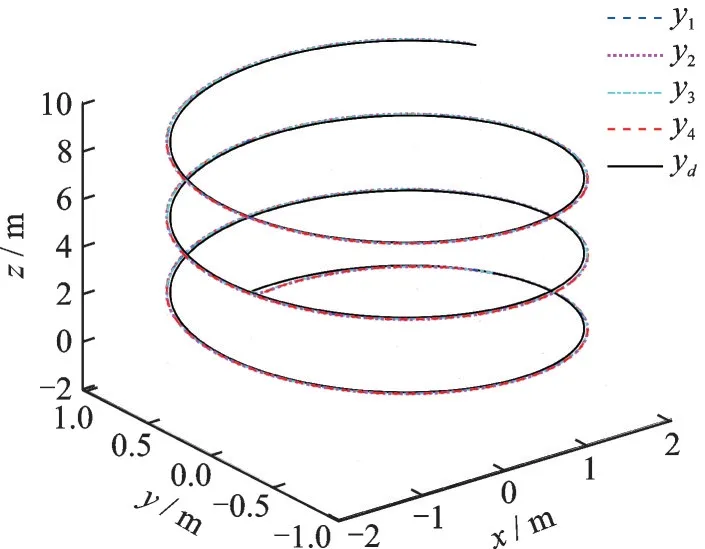
图3 六旋翼无人机的3 维跟踪轨迹图Fig.3 Three dimensional tracking trajectories of six-rotor UAVs

图4 跟随机yi,h 和长机yd,h 的轨迹图Fig.4 Trajectories of followers yi,h and leaders yd,h

图5 六旋翼无人机的总推力轨迹Fig.5 Trajectories of total thrust for six-rotor UAVs

图6 ‖ δ^i,ha1(t) ‖的轨迹Fig.6 Trajectories of‖ δ^i,ha1(t)‖

图7 ‖ δ^i,hc1(t) ‖的轨迹Fig.7 Trajectories of‖ δ^i,hc1(t)‖

图8 六旋翼无人机的触发时刻图Fig.8 Triggering instants of six-rotor UAVs
4 结 论
针对受输入时滞和外部干扰影响的六旋翼无人机,提出了一种基于强化学习算法的分布式自适应动态事件触发最优控制策略。首先设计了一种改进的事件触发策略来减少通信资源浪费,同时尽可能降低对系统控制性能的影响,并且该策略可以排除Zeno 行为。本文所提出的基于干扰观测器的最优分布式协同控制策略保证了六旋翼无人机系统的所有信号都有半全局一致最终有界,并且一致性误差能够收敛到原点的小邻域内。
