集中式MIMO雷达研究综述
2022-11-01何子述程子扬史靖希邓明龙
何子述 程子扬 李 军 张 伟 史靖希 苏 洋 邓明龙
(电子科技大学信息与通信工程学院 成都 611731)
1 引言
MIMO雷达通常被看成可以在波形域、空域、频域、时域、极化域等获得同一个目标多个不同的观测信号,并能将这些多信号进行融合处理实现目标探测的雷达系统。
根据雷达收发天线位置与目标参数之间的关系,MIMO雷达可大致分为两类[1],一类是集中式MIMO雷达(有时简称为MIMO雷达)[2-4],另一类是分布式MIMO雷达(又称分置天线MIMO雷达,有时称为网络化雷达)[5,6],本文仅限于介绍集中式MIMO雷达的研究动态(后文的MIMO雷达,均指集中式MIMO雷达)。
需指出的是,MIMO雷达同其他新生事物一样,也不是十全十美的。同传统相控阵雷达相比,在不同的应用场景下,各有其优点,因此可将相控阵雷达模式、MIMO雷达模式作为同一数字阵列硬件平台的不同工作模式。在不同的应用场景下,择其长处而用之,而不是用MIMO雷达完全取代相控阵雷达。一般而言,在噪声背景下探测高速弱目标时,相控阵雷达更合适;而在杂波背景下,同时探测大量慢速弱目标,则MIMO雷达更有优势[1]。
本文先介绍MIMO雷达的系统结构和原理,包括收发联合波束形成与虚拟阵列孔径、信噪比损失和探测威力,以及与传统相控阵雷达对比、在性能方面的优势等。
MIMO雷达系统自提出以来,波形优化设计一直是受到国内外学者广泛关注的研究方向。在发射端通过优化波形设计以提高雷达系统性能。文中先对MIMO雷达的基本探测波形-正交波形类别、特点及研究现状进行了讨论;然后对得到学术界深入研究的认知MIMO雷达波形优化设计的准则和优化方法等研究动态进行了归纳总结;最后对近期得到研究的探测-通信一体化波形设计进行了讨论。
在接收端,MIMO雷达由于其多信号接收特性,在信号与数据处理上与传统的相控阵雷达相比存在差异,学者们在这些方面进行了广泛的研究并取得了丰厚的成果。MIMO雷达利用波形分集在空域维获得的更高自由度为信号处理带来了更大的灵活性,是提升雷达角度估计和杂波抑制性能的基础。在参数估计方面,文中着重介绍MIMO雷达中波达方向(Direction Of Arrival,DOA)估计方面的研究动态与成果;对MIMO雷达目标检测方面的研究进展情况进行了讨论。在MIMO雷达资源管理与调度中,主要分为两大类:一类是针对单部MIMO雷达内部的资源优化调度,另一类是多部相互协同的MIMO雷达间的资源优化分配。
针对不同的具体应用场景,MIMO雷达系统架构与信号处理上有所不同,本文对MIMO雷达在机载应用中的杂波抑制与空时自适应处理进行了归纳;并对MIMO雷达在成像中的研究动态进行了讨论。随着TI公司低成本77 GHz毫米波MIMO雷达射频集成芯片的问世,MIMO雷达在车载辅助驾驶和安防等领域也得到广泛应用。围绕这些具体的应用,派生出了更多新思路、新方法和新技术方案,本文对该方向的近期研究进展和成果进行了阐述。
2 MIMO雷达构成与原理
集中式MIMO雷达的阵列结构类似于普通相控阵雷达,阵元位置间隔(或雷达天线口径)远远小于目标距离。基于此,对每个发射和接收信号,观测到的同一个目标参数是相同的(除各阵元位置不同引入的信号相位差外)。这些参数包括:目标方向角度,目标距离,目标多普勒频率,以及雷达散射截面积(Radar Cross Section,RCS)等[7]。否则,为分布式MIMO雷达。这样,接收时,集中式MIMO雷达可以实现同一个目标对不同发射信号回波的相参合成与处理。
2.1 集中式MIMO雷达构成
一种典型的集中式MIMO雷达收发结构如图1所示。以一维线阵为例,雷达阵面被分成Nt个发射阵元(或Nt个子阵),每个阵元分别发射不同的信号波形,常见的形式为相互正交的波形(构成正交波形MIMO雷达)。由于各波形相互正交,在空间不能相参合成高增益窄波束,而是形成Nt个独立的低增益宽波束。MIMO雷达每个接收阵元或子阵接收到目标对全部Nt个发射信号的回波信号后,通过匹配滤波器分离出Nt个发射信号回波分量,再通过数字波束形成技术实现同时多波束接收,以覆盖整个发射空域。此处的波束形成既包括接收波束形成,又包括等效的发射波束形成(将分离出的Nt个发射信号回波分量在接收端补相合成),两者既可以先后分别独立实现,也可以同时一体化实现(即收发联合波束形成)。波束形成后,进行后续的信号处理及数据处理。

图1 集中式MIMO雷达收发结构Fig.1 Collected MIMO radar transceiver structure
2.2 收发联合波束形成与虚拟孔径
以均匀线阵为例,定义发射导向矢量和接收导向矢量如下:

其中,θT和θR分别表示相对于发射阵和接收阵的空间角度。为简化,设收发阵列共址,有θT=θR=θ,ϕT=2πdTsinθ/λ,ϕR=2πdRsinθ/λ,λ表示信号波长,dT为 发射阵元间距,dR为接收阵元间距,aT(θ)为 MIMO雷达发射空间导向矢量,aR(θ)为MIMO雷达接收空间导向矢量。
对于方向角为θ0的目标,其回波信号经匹配滤波后的NtNr维信号矢量可表示为

其中,⊗为Kronecher乘积,ξ=Esη为每个阵元接收信号经匹配滤波器输出信号的幅度,η表示考虑了传播损耗和目标散射系数的回波信号的复幅度,Es表示单个发射信号的能量,且假设每个发射信号波形具有相同的幅度和能量;v表示NtNr维的接收噪声矢量。采用NtNr维权矢量w对信号矢量x进行加权求和,即为MIMO雷达的收发联合波束形成,波束形成输出为y=wHx,(·)H为矢量的共轭转置。显然,当权矢量w=aR(θ0)⊗aT(θ0)时,为常规的波束形成,可使目标方向的波束合成增益达到最大。此时,收发联合波束形成的方向图可表示为[8]

其中,ϕT0=2πdTsinθ0/λ,ϕR0=2πdRsinθ0/λ。收发联合方向图是传统相控阵发射方向图与接收方向图的乘积,可以被看作是发射阵列和接收阵列通过卷积运算得到虚拟阵列孔径的方向图。
以4发4收的正交波形MIMO雷达为例,发射端采用4倍半波长的阵元间距稀疏布阵,接收端采用半波长的阵元间距紧凑布阵,即dT=2λ,dR=λ/2。卷积后得到虚拟阵列为16阵元半波长阵元间距的均匀线阵(如图2所示)。

图2 正交波形MIMO雷达虚拟阵原理Fig.2 Principle of virtual array of orthogonal waveform MIMO radar
正交波形MIMO雷达通过收发联合波束形成,可以获得大于接收阵/发射阵的虚拟阵列孔径,能显著提高雷达的角度分辨性能。同时,由于接收信号处理引入了发射端的自由度,可提高雷达自适应处理的维度和灵活性,有利于对杂波和干扰的抑制。
2.3 处理信噪比与探测威力
由式(3)、式(4)可知,当MIMO雷达波束主瓣指向与目标方向一致时(θ=θ0),收发阵列波束形成达到最大增益NtNr,此时输出的信号功率为。设每个接收通道的接收噪声功率为σ2,则每个接收通道经匹配滤波后的输出噪声功率为σ2Es,且由于匹配滤波输出的噪声之间相互独立,所以经过波束形成加权求和的输出噪声功率为NtNrσ2Es,因此,MIMO雷达输出信噪比为[1]

对于具有相同收发阵列结构的相控阵雷达,接收波束形成后的信号功率仍然为,但其噪声功率仅为Nrσ2Es,所以相控阵雷达输出信噪比为

由此可得MIMO雷达和相控阵雷达输出信噪比的关系为

也就是说,MIMO雷达的输出SNR仅为相控阵雷达的1 /Nt。为了达到与相控阵雷达相同的目标探测性能,MIMO雷达需要更长的相参处理间隔(Coherent Processing Interval,CPI),多进行Nt倍的脉冲积累。
虽然,MIMO雷达在单个接收波束方向的驻留CPI时间为相控阵雷达的Nt倍,但对于全空域探测任务而言,其探测威力与相同收发结构的相控阵雷达是一样的,这是由于MIMO雷达采用低增益的宽波束照射责任空域并同时多波束接收,一次探测的空域范围是相控阵雷达的Nt倍,完成全空域探测的总时间与相控阵雷达相同(可通俗地理解为“用空间换时间”)。
MIMO雷达以处理数据量和计算量为代价,确保与相控阵雷达相同探测威力的同时,获得了对目标角度分辨、速度分辨性能的提升,以及目标容量和抗饱和攻击能力的改善。此外,MIMO雷达采用多个正交信号的低增益发射模式,对提高雷达的发射信号抗截获、抗分选识别(射频隐身性)的能力也具有明显的优势。
2.4 典型应用
理论上,MIMO体制雷达可以用于目标探测的任意领域,下面给出几个有特色的应用方向,包括其在机载探测、天波超视距探测、智能辅助驾驶、警戒安防等领域的应用。
在机载探测领域,利用MIMO雷达发射端的自由度,可改善机载雷达系统的杂波抑制和低速目标检测性能,相关的研究较多。例如,文献[8-10]研究了机载MIMO雷达的空时自适应处理(Space-Time Adaptive Processing,STAP)技术,包括杂波协方差矩阵估计、杂波秩估计、STAP算法等(后文将详细介绍);文献[11-13]研究了机载频率分集阵列(Frequency Diversity Array,FDA) MIMO雷达的杂波/干扰抑制与自适应处理技术;文献[14-16]研究了机载MIMO雷达的发射波形设计、发射波形与接收滤波器联合设计问题。
在天波超视距(Over-the-Horizon,OTH)雷达探测领域,文献[17]利用MIMO雷达技术讨论了OTH雷达的电离层多模传播问题,文献[18]建立了MIMO-OTH雷达的目标接收信号模型,文献[19]研究了MIMO-OTH雷达目标参数和电离层参数的联合估计问题。
在双基地雷达领域,文献[20-22]研究了双基MIMO雷达的角度估计问题,文献[23]则系统地研究了双基地MIMO雷达的原理、关键技术及特点。
在汽车智能辅助驾驶领域,MIMO雷达已经取得了量产化应用,尤其是基于时分复用体制的MIMO雷达成为量产芯片的标配,时分复用方式发射使得MIMO雷达系统发射成本极低。同时,基于线性调频连续波信号的去斜处理,使得大带宽发射信号仅需要几兆或者十几兆的AD采样速率进行接收采样,极大地降低了信号接收和处理的成本,使得量产难度进一步降低[24-28]。
在安防领域,典型应用包括区域安防和周界安防,区域安防实现一个宽角度区域的目标预警和跟踪,确保重要区域(要地)内无入侵目标;而周界安防则是实现电子围栏的升级版,例如国界线防护。MIMO雷达的长时间积累和虚拟阵列特点,可低成本满足安防应用对目标速度分辨和角度分辨能力的要求[29,30]。
3 MIMO雷达波形设计
波形分集赋予MIMO雷达巨大的潜力,MIMO雷达可设计的波形参数以及相应的处理方式比相控阵雷达要灵活很多,波形设计过程和信号处理也比传统相控阵雷达要复杂。本节首先介绍MIMO雷达正交波形的主要形式及应用特点,然后讨论在学术界得到深入研究的认知MIMO雷达波形设计。
3.1 MIMO雷达正交波形类别
在正交波形MIMO雷达系统中,设各通道发射的波形为s1(t),s2(t),...(t),如果各通道的发射波形满足

则称各发射波形之间是彼此正交的,这里E表示波形能量。
满足正交条件时,在接收端对接收信号进行匹配分离后得到的数据矩阵,能够保留目标相对于发射阵列的角度信息,以实现发射阵列测角,这是集中式MIMO雷达测角精度改善的基础。
对于正交波形MIMO雷达而言,可以利用频分、码分或者频分-码分混合的方式构造正交波形。下面分别对这些正交波形进行讨论(时分MIMO正交波形模式,将在第4.6节中介绍)。
3.1.1 频分步进频正交波形
将同一信号包络调制到若干均匀等间隔的载频上,就可以构成MIMO雷达所用的频分步进频正交波形信号,此时第n个发射通道的探测信号可表示为

其中,f0为起始频率,Δf为发射通道间的频率间隔。若包络u(t)的带宽为B,此时频分正交信号的总带宽为BΣ=B+(M -1)Δf;需指出的是,波形间的正交性与频率间隔 Δf有关,通常 Δf越大,正交性越好。
包络信号u(t)可以是线性调频(LFM)信号、非线性调频信号、伪随机相位编码信号或其他可能的信号形式。
需指出的是,基于线性调频包络信号u(t)的频分正交波形MIMO雷达,发射功率在空间具有距离-角度耦合的特点[1]。或通俗地讲,同一个方向的发射功率,随距离和时间按一定频率的正弦规律变化,如图3所示,利用此特点,可在一定程度上分辨主瓣内的干扰和目标。

图3 LFM步进频频分MIMO 雷达发射功率距离-角度耦合Fig.3 Distance-angle coupling of LFM stepped frequency division MIMO radar transmit power
3.1.2 码分正交波形
若在不同的发射通道中使用相同的载频,但波形编码彼此正交,则可以构成MIMO雷达所用的码分正交信号,此时第n个发射通道的调制包络可以写成

其中,rect(·)为门函数,Tz为一个码元的宽度,K为编码信号的长度。为满足正交特性,有

根据φn,k取值范围不同,编码信号可以是二相、四相、八相编码或者更多相位的多相码信号,称为正交均匀离散相位编码信号;φn,k也 可以是在[0,2π)中任意取值,称为正交连续相位编码信号。
码分正交波形的设计多采用最优化思想,以最小化峰值旁瓣或最小化总的自相关和互相关旁瓣能量为优化准则;常用的优化设计方法包括模拟退火算法[31]、遗传算法[32]、序列二次规划[33]等。另外,以贪心算法为代表的一些邻近搜索方法也被用于编码信号的设计[34],以进一步改善信号的性能指标。
码分正交波形除相位编码序列外,还可以是离散频率编码序列[35],其优化设计方法类似。
3.1.3 混合正交波形
除正交频分和码分信号这两种信号波形外,还有几种被称为混合信号的特殊信号体制得到了研究。这里以编码-线性调频信号为例进行说明,它用线性调频信号取代正交编码信号中的简单脉冲rect(t/Tz),得到一种基本的混合信号波形,可以表示为[1]

除相位编码-线性调频混合信号外,还有频分相位编码信号、离散频率编码-线性调频混合信号[36]以及其他更为复杂的信号形式。
3.2 认知MIMO雷达波形设计
随着电子技术的快速发展,现代雷达面临的电磁对抗环境日益复杂,发展智能化的MIMO雷达系统是进一步提高雷达战术性能,拓展雷达适用环境的必然趋势,而认知波形设计是雷达走向智能化的关键技术。面向不同战术需要,自适应地调整MIMO雷达发射波形,从而大幅提升雷达在复杂电磁环境中对目标的探测性能。
3.2.1 MIMO雷达波形优化准则与约束条件
针对雷达不同的应用需求,MIMO雷达的波形优化设计准则主要可以归纳为以下几类。
(1) 基于发射功率空域分布的波形设计。同时考虑目标探测与射频隐身等需求,MIMO雷达波形设计的目的是灵活的发射方向图赋型,此类波形优化的主要准则如下。
(a) 最小化方向图匹配误差准则[37-43]:

(b) 最小化方向图积分旁瓣主瓣比(Integrated Sidelobe to Mainlobe Ratio,ISMR)准则[44-47]:

其中,Θs和 Θm分别代表旁瓣和主瓣区域。ISMR值越小,所形成的方向图性能越好。由于目标函数是关于s的分数二次函数,在不考虑波形其他约束条件下,其最优解可以通过广义特征值分解获得。
与传统相控阵雷达相比,这类方法设计的方向图具有更宽的覆盖范围以及同时多方向探测能力;与正交波形MIMO雷达相比,这类方法设计的方向图又具备一定的发射增益。
(2) 面向目标检测性能的波形设计。面向目标检测任务,波形设计的目的是在虚警概率一定的条件下,目标检测概率最大。此类波形优化的主要准则有如下。
(a) 最大信干噪比(Signal-to-Interference-plus-Noise Ratio,SINR)准则[48-53]:

其中,w为接收滤波器,SNR 为信噪比,θt为目标方向,其中INRk为 第k个干扰的干噪比,θk为第k个干扰所在的方向。该优化准则的建立需认知目标方向、干扰方向、信噪比和干噪比,而实际应用中这些参量通常不能准确获得,因此需要考虑一种更加稳健的目标函数。
(b) 最大化相对熵(Relative Entropy)准则[54-57]:

其中,P0(y)和P1(y)分 别表示H0和H1假设下观测样本的概率密度函数,两种假设下,观测样本为

其中,t和c分别表示目标和杂波相应向量,n为观测噪声。
相对熵刻画了有无目标二元假设检验的概率密度函数之间的差异程度,相对熵越大,目标检测性能越好。但需推导相对熵与MIMO雷达波形S的关系,其推导过程复杂。
(3) 面向目标参数估计的波形设计。针对参数估计任务,MIMO雷达波形设计的目的是使目标参数估计性能最优,该类波形优化设计的主要准如下。
(a) 最小化克拉默-拉奥罗界(Cramer-Rao Bound,CRB)准则[58,59]:

其中,trace(·)为矩阵的迹,F表示关于目标角度θ=[θ1,θ2...,θP]T的Fisher信息矩阵,且是关于发射波形S的函数。由于其表达式比较复杂,感兴趣的读者可以参考文献[58]。目标参数估计的CRB值越小,参数估计性能越好。
(b) 最小化均方误差(Mean Square Error,MSE)准则[60-62]:

其中,矩阵R定义为
其中,βk表示第k个干扰的功率,Jk表示移位矩阵,Γ表示噪声协方差矩阵。该准则需要提前获得干扰功率与噪声的协方差矩阵。
(4) 面向提升目标分辨率以及干扰/杂波抑制性能的波形设计。这里波形设计的目的是控制波形自相关互相关旁瓣电平,旁瓣电平过高会导致强杂波/干扰对相邻位置微弱目标的遮蔽效应,直接影响到小目标的检测性能。此外,为提升目标探测时的距离分辨率,还期望波形具有良好模糊函数性能。该类波形设计的主要准则如下。
(a) 最小化加权积分旁瓣电平(Weighted Integral Sidelobe Level,WISL)准则[63-68]:

其中,γl=γ-l表 示第l个旁瓣电平加权值,rpq(l)定义为

设计中,可以通过调节γl值来控制感兴趣距离旁瓣的电平大小。利用帕斯瓦尔定理,该准则可以转化为频域的形式:

采用频域的建模形式,求解过程中,某些矩阵相乘可以采用快速傅里叶变换(Fast Fourier Transform,FFT)进行加速。此外,由于该目标函数是波形s的4次函数,在后续的优化求解过程中,会遇到如式(13)准则J(α,s)类似的挑战。
(b) 模糊函数匹配控制准则[69]:

其中,(τ,f,v)分别对应目标延时、多普勒频率和归一化空间频率,波形模糊函数χ(τk,fl,vm,vn)定义为

可以发现,由于准则(25)涉及4个维度(延时、多普勒、空间匹配和失配空间频率)的离散化表征,因此在优化求解过程中,会面临计算复杂度与存储空间过大的问题。
(5) 面向目标识别的波形设计。针对目标识别,MIMO雷达波形设计的目的是使目标识别性能最优,该类波形优化设计的主要准则为互信息最大化准则[60,70]:

(6) MIMO雷达波形约束条件。
(a) 恒模约束:旨在使雷达发射机工作于饱和状态,以最大化雷达发射机效率。该约束表示为

值得注意的是,恒模约束满足Complex Circle流形,满足黎曼优化(Manifold Optimization)适用条件[71,72]。
(b) 峰均比(Peak-to-Average-power Ratio,PAR)约束[53,73]:旨在限制发射机动态范围,使发射机工作于临近饱和状态,提升发射机效率,该约束可以表示为

值得注意的是,当η=1时,PAR约束退化为恒模约束。
(c) 相似度约束[74-76]:旨在限制设计波形与参考波形在欧几里得空间上相似,以获得类似于参考波形脉压特性和模糊函数特性,该约束可以表示为

其中,s0为 参考波形,ϵ为相似度程度。值得注意的是,相似度约束是一个非齐次的二次约束,这会给波形优化算法的设计带来挑战。
(d) 多普勒容忍性约束:旨在约束波形的多普勒失配增益损失,使设计波形满足对高速目标的探测要求,该约束可以表示为

其中,P表示多普勒频偏组个数,sm,p(l)=sm(l)·ej2πl(p-1)/L表示第m个波形的第p多普勒频偏组波形。
(e) 谱约束[77-81]:旨在约束雷达波形中某些频段传输的能量,减少雷达与某些电子系统干扰,实现与电子设备的频谱兼容,该约束可表示为

其中,Fk和Uk的定义见文献[81]。谱约束为齐次的二次凸约束,可适用于半正定松弛(SemiDefinite Relaxation,SDR)算法。
(f) 正交约束:旨在约束各波形之间的相关性,实现波形分离,以获得阵列虚拟孔径,该约束可表示为

值得注意的是,正交约束满足Stiefel流形,满足黎曼优化适用条件。
3.2.2 MIMO雷达波形优化方法
MIMO雷达波形设计是一个数学优化问题。波形优化设计的主要挑战在于:(1)复杂的目标函数,使得波形变量存在非线性耦合;(2)非凸的约束条件,这将使得波形优化算法很难找到高质量的解,且计算复杂度很高。接下来,介绍几种适用于波形优化问题的求解算法框架。
(1) 块坐标下降法(Block Coodinate Descent,BCD)[52,82]。BCD法是一种非梯度的优化方法,和梯度下降方法不同,它每次沿着单个维度方向进行搜索。当得到一个当前维度最优解之后再循环使用不同的维度方向,最终获得局部最优解。当目标函数可微且凸是函数时,此时的局部最优解为全局最优。
对于MIMO雷达波形设计问题,其目标函数描述为f(s),s=(s1,s2,...,sn),在BCD方法的第t次迭代中一次更新:
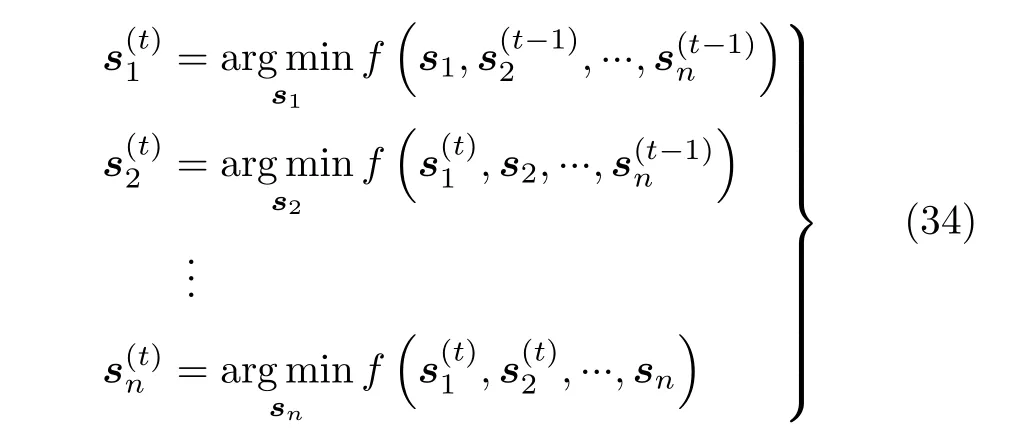
对于每个子问题的求解,需要把其他的变量看作常量,只需要针对当前变量进行寻优。因此,BCD方法将一个复杂的高维优化问题分解为一系列简单的低维优化问题进行求解,大大降低了问题的复杂性。
根据BCD适用条件,变量s=(s1,s2,...,sn)的各个变量块在约束条件中没有耦合,因此BCD法通常用来求解仅含恒模约束的波形设计问题。此外,针对离散相位优化问题,BCD方法通常也可以用来求解,但是由于目标函数f(s)对于离散变量的不可微性,使得获到的解会陷入非驻点。
(2) 迭代分块连续上界最小化(Block Successive Upper bound Minization,BSUM)[53,83]。对MIMO雷达波形优化设计而言,所形成的优化问题往往难以直接求解,因此需要采用间接构造的方法来进行问题简化,BSUM算法框架的思想即是针对复杂非凸优化问题,考虑采取多块局部目标函数逼近的思路。构造若干相对易求解的近似目标函数来替换原复杂目标函数f(s),这里(s1,s2,...,si-1,si+1,...,sn)。当满足一定条件时,用函数求 出的最优解能够逼近f(s)的最优解。如图4所示,针对高维数学求解问题而言,BSUM算法的核心即在构造简单的凸上界函数利用多阶段局部近似机制转化为易于求解的多个近似凸优化问题,并用逐步迭代来逼近原目标函数的最优解。

图4 BSUM算法求解框架示意图Fig.4 Schematic diagram of the solution framework of the BSUM algorithm
值得注意的是,当变量s不分块时,BSUM算法退化为另一种常见的优化框架,即最大最小(Majorization-Minimization,MM)算法[55,56,67,84]。此外,跟BCD算法类似,BSUM算法可以进行块拆分的前提是各块在约束条件中没有耦合。
(3) 交替方向乘子法(Alternating Direction Method of Multipliers,ADMM)[38,85,86]。ADMM算法是一种解决变量之间存在耦合优化问题的方法。它可以将原问题的目标函数等价地分解成若干个可求解的子问题,然后并行求解每一个子问题,最后协调子问题的解得到原问题的局部最优解。当原问题为凸问题时,ADMM算法可以收敛到全局最优。
由于ADMM算法灵活的拆分思想,使得ADMM算法成为MIMO雷达波形优化设计问题的常用求解方法。根据不同的优化模型,ADMM算法具有不同的拆分形式,下面以一个具体的波形优化问题为例,对ADMM的算法流程进行阐述。
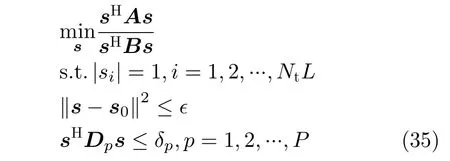
优化问题(35)中,含非凸的分数二次函数。需指出的是,ISMR准则以及SINR准则具有该形式;第1个约束条件为恒模约束,第2个约束条件为相似约束;第3个约束为二次不等式约束,其中Dp为半正定矩阵,波形的谱约束,PAR约束具有该形式。很显然,该优化问题是一个难解的非凸优化问题,下面将利用ADMM算法的灵活拆分思路,来设计该优化问题的求解方法。
首先引入辅助变量,将问题(35)进行等价变形为

将等式约束r=s,t=s-s0,xp=s带入问题(36)的增广拉格朗日函数中,其增广拉格朗日定义见文献[85]。在ADMM框架下,通过最小化增广拉格朗日函数依次更新原始变量与对偶变量[85]。值得注意的是,在该问题中,原始变量和对偶变量都可以获得闭式解的更新表达式。因此,ADMM框架就是将复杂的优化问题转化为若干个简单的子问题,通过依次求解子问题的解,逐步逼近原问题的驻点。
3.2.3 MIMO探测-通信一体化波形
探测-通信一体化是指在同一软件或者硬件平台上实现雷达探测和无线通信两种功能。早期作为一种解决雷达与通信频谱资源拥塞的关键技术,受到了学术界的广泛关注[87]。近年来,随着第5代移动通信技术发展,在即将到来的万物互联的新时代,很多新型设备将同时具备雷达感知和通信互联的功能。由此,探测-通信一体化技术不再局限于对频谱利用效率的提升,而是逐渐发展成为可用于未来新型国防装备、车联网、智能家庭、智慧城市等的重要技术[88,89]。
总结MIMO探测-通信一体化波形的设计,其相关的研究主要从通信波形为基础的设计[90-93]、雷达波形为基础的设计[94-96]和联合一体化波形设计[97-99]3个维度展开。
对于以通信波形为基础的设计,其通过修改相关的通信协议或波形,以实现其雷达探测的功能。例如,在文献[91]中,作者基于IEEE 802.11ad协议,通过设计自适应导频序列,实现了高精度的车载探测-通信一体化系统。类似地,基于Wi-Fi相关协议的MIMO探测-通信一体化系统也受到了广泛的关注[92,93]。
在以雷达波形为基础的设计中,通信功能作为次要的功能被嵌入传统的雷达信号中。例如,在文献[94]中,作者将通信的比特数据进行PSK相位调制后,作为附加相位信息嵌入到传统的雷达线性调频波形中,以实现探测-通信一体化的功能。
上述两个研究方向,无需对现有的系统构架进行改动,即可简单地实现探测-通信一体化的功能。但是,在现有的波形上进行设计将导致自由度受限,使得所设计系统的雷达或通信性能有较大的损失。
目前,较为稳健的MIMO探测-通信一体化波形设计方法是联合一体化波形设计。此方法通过直接设计MIMO探测-通信一体化波形,极大地提升了一体化系统性能。在进行联合一体化波形设计之前,需要确定该系统面对的场景和工作任务,以确定合适的雷达和通信性能指标。具体来说,对于雷达的指标frad,可以选择如前文所述的方向图匹配误差准则、方向图积分旁瓣主瓣比、信干噪比、相对熵、克拉默-拉奥界、均方误差、加权积分旁瓣电平等作为雷达功能的衡量指标。针对通信功能指标fcom,可以考虑采用经典的信道容量、通信速率、通信信噪比、接收星座图间距等衡量指标[88]。
除确定上述雷达和通信任务的衡量指标外,MIMO探测-通信一体化波形设计也需要将设计问题约束在一定的可行范围C内,例如功率约束、峰均比约束、恒模约束等。
基于上述MIMO探测-通信一体化系统指标设计及其约束条件,可以采用多目标优化加权法或者约束法对一体化波形设计问题建模。其具体形式可表示为
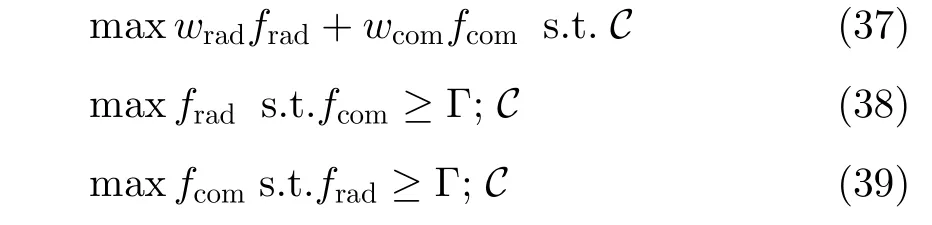
其中,式(37)是基于加权的设计方法,wrad和wcom分别代表探测-通信一体化系统中探测和通信功能在系统中所占据的权重。式(38)和式(39)分别是将通信或者雷达探测指标作为约束的设计方法,该方法可以将通信或者雷达性能精准控制在给定门限值Γ 之上。
通常,所得到的MIMO探测-通信一体化波形设计问题是高维度非凸的优化问题。可采用前文介绍的各种方法进行再推导和求解。
4 MIMO雷达信号与数据处理
发射正交波形的MIMO雷达在实际中正逐步得到应用,与具体应用场景有关的信号处理和数据处理算法得到深入研究。本节将从MIMO雷达的参数估计、目标检测、资源管理、机载应用、成像和毫米波雷达等方面进行讨论。
4.1 MIMO雷达角度估计
相比于传统相控阵雷达,MIMO雷达由于在空域维具有更高的自由度,因而具有更好的参数估计性能[100,101]。
基于传统旋转不变技术的信号参数估计(Estimation of Signal Parameters via Rotational Invariance Technique,ESPRIT)算法,文献[102]研究了双基地MIMO雷达离开角(Direction of Departure,DOD)和DOA的估计方法。在此基础上,文献[103,104]对ESPRIT算法进行了改进,能够在不损失参数估计性能的前提下,显著降低算法的计算复杂度。文献[105]基于经典的多重信号分类(MUltiple SIgnal Classification,MUSIC)算法,提出了一种降维的MUSIC算法,用于同时估计MIMO雷达的DOD和DOA。结果表明,该算法优于上述基于ESPRIT的算法,且性能与二维MUSIC算法接近。
基于并行因子(Parallel Factor)分析,文献[106-109]从张量代数的角度研究了MIMO雷达的参数估计问题。文献[109-117]考虑了非均匀收发阵列下的MIMO雷达的参数估计问题,涉及的阵列类型包括最小冗余阵、嵌套阵、互质阵等。文献[21]考虑了未知相关噪声下的联合DOD和DOA估计问题。文献[118-120]则讨论了非完全正交波形背景下的MIMO雷达参数估计方法。基于稀疏贝叶斯学习,文献[121]研究了天线存在耦合场景下的MIMO雷达非网格DOA估计。之后,文献[122]对文献[121]的方法进行了优化,旨在降低计算复杂度。文献[123]提出了一种基于深度神经网络的稳健算法,能够实现阵列存在耦合且噪声为色噪声时的MIMO雷达DOA估计。近期,文献[124]基于深度学习设计了一种单快拍DOA估计算法,结果表明所提算法具有超分辨性能。
4.2 MIMO雷达目标检测
目标检测作为MIMO雷达的最基本功能,一直受到学者们的广泛关注。文献[125]对高斯白噪声条件下MIMO雷达检测器性能进行了初步分析,之后文献[126]导出了基于MIMO的广义似然比检验(Generalized Likelihood Ratio Test,GLRT),用于抑制在参数估计中由于强干扰造成的假峰值。文献[127]从相对熵的角度对MIMO雷达的检测性能进行了分析。针对复合高斯杂波背景下的MIMO雷达目标检测,文献[128]提出了一种两步处理GLRT检测器,文献[129]分别导出了基于MIMO的Wald检测器以及Rao检测器,结果表明在信号匹配的场景下,Wald检测器和GLRT检测器的性能接近,但在信号失配的场景下,Rao检测器的性能更加稳健。进一步,文献[130]提出了一种不需要训练数据的可调自适应检测器,该检测器是文献[129]中Wald检测器以及Rao检测器的推广,具有更优的稳健性。
基于贝叶斯理论,文献[131]提出了贝叶斯广义似然比检验、贝叶斯Wald、贝叶斯Rao 3种检测器,结果表明上述3种检测器优于传统非贝叶斯检测器。文献[132,133]研究了基于噪声加干扰协方差矩阵结构的MIMO雷达目标检测问题。文献[134]研究了信号导向矢量失配情况下的MIMO雷达目标检测问题。
近年来,配置大量收发天线的MIMO雷达,即大规模MIMO雷达(massive MIMO radar)引起了广大学者的关注,有关大规模MIMO雷达背景下的目标检测问题可参见文献[135-137]。
4.3 MIMO雷达跟踪与资源管理
相比于相控阵雷达,MIMO雷达具有发射波形维度的自由度,在空域上可以形成同时多波束,因此可优化调度管理的资源维度更高。具体而言,MIMO雷达资源管理主要可以分为两大类:一类是针对单部MIMO雷达内部的资源优化分配[138-151];另一类是多部相互协同的MIMO雷达间的资源优化分配[152-156]。
对于MIMO雷达系统而言,其可以进行优化调度的多维资源包括波束资源、发射波形资源、功率资源、带宽资源以及时间资源。其中,时间资源又可以细分为重访时间资源和驻留时间资源。MIMO雷达系统资源优化的两大主要准则分别为基于跟踪性能最大化准则和基于低截获概率(Low Probability of Interception,LPI)性能最大化准则,通过对雷达资源的管理调度,以实现MIMO雷达系统目标跟踪性能的最大化[138,139,141-148],或者MIMO雷达系统LPI性能的最优化[155],亦或兼顾跟踪性能和LPI性能[149-151]。对于多部相互协同的MIMO雷达系统,还可以对MIMO雷达节点进行优化选择,从而进一步增大优化自由度,提升MIMO雷达系统的性能[152-156]。
通常,MIMO雷达跟踪性能由后验克拉默-拉奥下界(Posterior Cramer-Rao Lower Bound,PCRLB)来表征。具体而言,在第k个跟踪时刻,目标q的PCRLB表示为

下面对学者们在MIMO雷达资源优化管理方面的具体工作和贡献做简述。
由于发射阵元数目有限,MIMO雷达系统只能合成一定数目的波束,从而波束成为关键资源。文献[138]针对多目标跟踪问题,对MIMO雷达的波束资源和发射功率资源进行了联合优化,以实现最大化跟踪性能。在文献[138]的基础上,文献[139]考虑了杂波场景下MIMO雷达的功率优化分配问题,并提出了一种基于修正梯度投影的求解算法,最终实现了跟踪性能的最大化。考虑功率资源不足的情况,文献[140]提出了一种基于服务质量框架的强鲁棒性的功率分配算法。文献[141]针对机动目标跟踪问题,提出了一种高效快速的功率分配算法,以使得跟踪性能最大化。文献[142]基于深度强化学习算法对MIMO雷达的波束及功率资源的优化管控问题进行了研究,并提出了一种基于数据驱动的波束及功率优化分配算法,实现了跟踪性能的最大化。文献[143]提出了一个考虑不同目标优先级的基于比例精度的功率分配算法,极小化多目标整体跟踪误差。文献[144]提出了一种认知发射方向图设计算法,以达到序贯条件贝叶斯克拉默-拉奥界最小化。文献[145]考虑了压制干扰场景下的MIMO雷达联合波束选择和功率分配优化问题,并提出了基于半正定规划的优化求解算法,实现了目标跟踪性能和被跟踪目标数目的最大化。文献[146]针对MIMO雷达的联合功率和带宽资源分配问题进行了研究,并提出了一种基于凸松弛和循环最小化算法的优化求解算法,以使得多目标整体跟踪性能最大化。文献[147]提出了一种MIMO雷达多波束的空-时自适应分配算法,实现多波束资源在空间和时间两个维度上的联合优化分配,最终有效提升了多目标整体跟踪性能。针对波束分配和发射波形选择的联合优化问题,文献[148]提出了一种基于Zoutendijk可行方向法的优化求解算法,实现了MIMO雷达联合波束分配和波形优化选择,以使得跟踪性能最大化。综合考虑目标跟踪性能和低截获性能,文献[149]提出了一种自适应MIMO雷达资源分配算法,以兼顾跟踪性能和低截获性能。文献[150]提出了一种自适应同时多波束资源分配算法,最大化被跟踪目标数目的同时最小化系统资源消耗。文献[151]提出了一种联合波形参数选择和资源分配算法,以实现跟踪性能最大化和系统资源消耗最小化。
通过利用空间分集的优势,多部相互协同的MIMO雷达组成的网络化雷达系统的资源优化管理得到了研究。文献[152]研究了MIMO雷达网络系统的联合波束和功率优化分配算法,从而实现多目标跟踪中最差目标的跟踪误差的最小化。文献[153]基于服务质量准则,提出了一种基于奖励准则的迭代下降算法,实现波束和发射功率的联合优化分配,以使得目标跟踪误差逐渐逼近期望值。文献[154]提出了一种联合资源分配和波形类别及参数选择算法,并提出了基于改进粒子群的优化求解算法,以实现目标跟踪误差和系统资源消耗的最小化。文献[155]提出了一种稳健的联合波束选择和功率分配算法,在保证目标跟踪精度的基础上最小化系统资源消耗。考虑雷达位置存在不确定性,文献[156]提出了一种联合功率分配和量测选择算法,并提出了基于稀疏增强的序贯凸规划优化求解算法,以使得跟踪误差和所选量测数目最小化。
4.4 MIMO雷达中的STAP与杂波抑制
将MIMO雷达应用于如飞机、卫星或导引头等空中平台,可构成空载MIMO雷达。空载MIMO雷达需要解决强地杂波背景下的目标检测问题。STAP利用运动平台雷达回波信号的空-时耦合特性,通过阵元(空)、脉冲(时)两域的联合处理,形成空-时二维滤波器,是一种抑制杂波/干扰的有效技术手段。
为了降低基于MIMO雷达的STAP维度,学者们提出了降秩STAP(Reduced-Rank STAP,RRSTAP)、降维STAP(Reduced-Dimension STAP,RD-STAP)两种主要方法。文献[157]提出了一种降秩MIMO-STAP方法,结合干扰和噪声协方差矩阵的块对角特性,离线构造杂波子空间,并采用零强迫法计算MIMO雷达的STAP权向量。文献[158]基于机载MIMO雷达发射波形分集的特性,构建了机载MIMO雷达联合RD-STAP处理的统一理论框架,并在此基础上,建立了3种RD-STAP处理结构。文献[159]提出一种基于广义旁瓣对消的降维MIMOSTAP方法,在虚拟阵结构下利用改进的施密特正交方法构造通道,并以此为基础进行降维处理。文献[160]提出了一种基于最大信杂比的发射波束空间矩阵和RD-STAP滤波器联合设计方法,文中建立了MIMO雷达的RD-STAP信号模型,利用凸优化方法设计降维矩阵。由于杂波秩大小表明了抑制杂波所需要的自由度,准确估计杂波秩可以为RRSTAP或是RD-STAP中所需要的样本数量及选用的通道数目提供重要依据,为此,基于文献[161]的相控阵雷达杂波秩估计方法,文献[162-164]估计了MIMO雷达中的杂波秩,表明MIMO雷达的杂波秩比相控阵更高,MIMO雷达在带来更好的目标探测性能的同时,也带来了更高的计算复杂度。
除了降维降秩等处理方式,学者们从降低对样本数量依赖性的角度出发,利用先验结构信息提高杂波协方差矩阵的估计性能,即使在有限样本数的情况下也能估计出准确的协方差矩阵,先验结构信息包括低秩特性、Kronecker积结构、Toeplitz结构等。文献[165]利用persymmetric结构提高协方差矩阵估计精度,并采用双迭代法求出所需的权向量。文献[166]将样本协方差矩阵替换为发射样本协方差矩阵和接收样本协方差矩阵的Kronecker积形式,通过减小噪声特征值的色散程度和消去期望信号分量来重构发射和接收样本协方差矩阵。文献[167]将压缩感知(Compressed Sensing,CS)技术应用于MIMO,利用稀疏贝叶斯学习(Sparse Bayesian Learning,SBL)方法,设计了一种新的联合估计目标方位和杂波协方差矩阵的算法。文献[168]根据低秩矩阵和Kronecker积矩阵的特性,提出了一种适用于确定性复合高斯(Compound Gaussian,CG)和高斯白噪声混合情况的协方差矩阵估计方法,对MIMO-STAP的性能有较大改进。文献[169]利用MIMO雷达协方差矩阵的扩展Kronecker积结构和低秩特性,提出了一种基于二核范数惩罚的最小二乘估计器,提升了有限样本下的杂波协方差矩阵的估计性能。
近年来,在MIMO-STAP中,发射波形/方向图与STAP权值联合设计受到学者们的关注。利用MIMO结构提供的波形分集进一步增强对地面运动目标的探测性能也是研究的热点与方向[170]。文献[171]针对杂波和干扰背景中的慢速运动目标检测,以最大干噪比为目标函数,提出利用循环算法解决非凸问题。文献[172]提出了一种基于波束形成的MIMO阵列天线优选方法,以减轻多干扰信号和杂波的干扰。文献[173]研究了联合设计问题中的二次半正定规划问题。文献[174]以接收信号与目标脉冲响应之间的互信息作为设计度量,研究了MIMO-STAP中的波形设计问题。文献[175,176]研究了在不确定条件下的发射波形与接收滤波器组联合设计,包括发射波形在能量约束、弹性模量约束、常量模量和相似性约束下的联合设计。除了与发射波形的联合设计,接收权值与发射波束形成的联合设计也是一个研究方向,文献[177,178]讨论了MIMO雷达中发射波束形成和接收滤波器的鲁棒联合设计。
4.5 MIMO成像雷达中的信号处理
MIMO雷达进行成像,在文献中主要可以分为3大类:结合MIMO雷达体制与SAR体制,利用雷达平台运动实现合成孔径成像[179-184];结合MIMO雷达体制与逆合成孔径雷达(Inverse Synthetic Aperture Radar,ISAR)体制,利用目标的旋转运动实现对目标成像[185,186];另外有一类则是基于MIMO虚拟孔径以及超分辨角度测量等算法来提升角度分辨率,实现对目标场景的角度高分辨感知。
文献[179]对MIMO雷达体制与SAR应用相结合的优点和不足进行了分析,表明其优势主要体现在MIMO雷达虚拟孔径带来的成像分辨率的提升。但是也指出,由于平台速度极高,大的多普勒频移使得正交信号匹配分离可能存在问题。为了更好地实现MIMO和SAR雷达结合应用,文献[180]提出一种基于空时编码的发射信号设计方法。文献[181]针对MIMO-SAR雷达应用,提出一种扩展空时编码架构,实现对自相关和互相关旁瓣有效对消。文献[182]提出一种基于正交频分复用(Orthogonal Frequency Division Multiplexing,OFDM)的空时编码结构,提升了距离分辨率,实现了空域分集增益。文献[183]研究了近场MIMO-SAR中的距离抑制算法。文献[184]将MIMO雷达应用到穿墙雷达成像中,通过MIMO雷达收发虚拟阵列增加成像孔径,并利用压缩感知技术,实现了低成本高分辨成像。文献[185]将ISAR与MIMO体制进行结合,得到有限采样间隔的高分辨图像。文献[186]中采用宽带MIMO技术,并基于两个分布式阵列来实现ISAR成像功能,虚拟阵列使得系统成本大幅下降。
文献[187]收发同址MIMO的三维成像雷达进行了研究,并对不同的MIMO雷达阵列配置进行了分析对比。文献[188]针对样本快拍个数不足的情况,提出一种基于迭代最小化的稀疏学习方法,提升了基于角度-距离-多普勒的成像性能。文献[24]研究了宽带MIMO雷达对多目标场景成像时的正交波形设计方法,对发射方向图和发射信号的功率谱进行联合优化设计。文献[25]采用调频连续波(Frequency Modulation Continuous Wave,FMCW)体制,设计了一款W波段MIMO雷达原理样机,可实现对照射场景的三维成像。文献[26]基于W波段,分析对比了时分和频分实现MIMO雷达正交信号发射模式对高分辨成像效果的影响,并进行了外场试验验证。文献[27]基于线性FMCW技术,并通过时分复用(Time-Division Multiplexing,TDM)发射模式来实现发射信号之间的正交性,设计了一个24×24的MIMO雷达阵列,可实现近距离内的目标距离、方位和俯仰的三维精确感知。
4.6 毫米波MIMO雷达中的信号处理
MIMO雷达在军事领域的应用,或许是由于涉密等原因,公开报道的不多。然而,MIMO技术在民用领域中却大放异彩,几乎成为当前毫米波雷达应用中的必然选项,毫米波雷达当前已经广泛应用于汽车辅助驾驶[189-191]、区域或周界安全防护[192]以及智能交通监控等领域[193]。尤其是德州仪器(Texas Instruments,TI)在毫米波领域推出的系列芯片,如AWR 1243,AWR1843以及AWR2243等芯片,均支持多信号发射多信号接收的MIMO体制雷达,使得高集成度、低成本的MIMO平台设计和实现难度进一步降低。
MIMO雷达发射正交的或独立的信号,要实现正交,当前主要有3种手段,时分多址(Time Division Multiple Access,TDMA)[28,194]、频分多址(Frequency Division Multiple Access,FDMA)[195,196]和码分多址(Code Division Multiple Access,CDMA)[197]。商业应用中需要考虑成本,时分正交尤其适用,频分正交在一定应用场景中也可满足要求,而码分正交则对硬件要求较高。在毫米波MIMO雷达领域,采用去斜处理实现大带宽发射和低采样率接收,提升了距离分辨率同时又降低硬件成本,同时结合民用场景的一些特殊性,基于时分发射的方式来实现信号之间的理想正交,降低发射信号的复杂度以及非理想匹配分离问题[194],通过各个发射天线分时进行工作,而发射的信号可以相同也可以不同,当前应用大部分是分时发射同一个线性调频信号。
有别于第3.1节中的几种正交波形,对于TDMMIMO雷达,正交性通过分时实现。每一帧包含多个时间块,对于每一个时间块又包含了NTX个时间片,对应NTX发射天线的发射时间段。TDM-MIMO是最简单的发射多个信号的方案,因而得到了广泛应用。典型的TDM-MIMO FMCW雷达中,对于每一个TX-RX组合进行2D-FFT(距离-多普勒FFT)。每一个2D-FFT对应于一个虚拟阵元,若一个雷达NTX= 2,NRX= 4,将计算4×2=8个距离-多普勒矩阵。然后对所有的2D FFT矩阵采用非相干相加,得到一个预检测结果,然后通过检测算法找到有效目标的位置。对于每一个有效的目标,进行角度FFT处理,可以得到该目标的角度估计值。在进行角度FFT时,需要进行一次多普勒校正,以此来校正目标速度引起的相位偏差。图5是TDM-MIMO雷达的处理原理图。
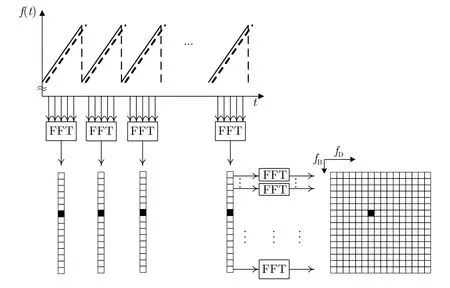
图5 TDM-MIMO雷达原理Fig.5 Principle of TDM-MIMO radar
毫米波雷达相比于其他传感器,如激光雷达、摄像头等设备,对环境的稳健性是其突出优点,但是角度分辨率低是其最大的不足。因此,如何提高毫米波雷达的角度分辨率成为研究热点,文献[198-205]从阵列设计、波形设计、高分辨测角算法以及基于人工智能的DOA估计方法等多个方面展开了研究。由于汽车毫米波雷达天线口径受限,在运动中合成大的口径实现高分辨成像具有极大吸引力,文献[206,207]中结合线性调频连续波的连续发射特点,认为传统合成孔径雷达的“走停”模型会出现较大偏差,提出改进的FMCW-SAR成像算法。毫米波雷达在汽车领域的大量应用,势必引起严重的相互干扰问题,如何抑制多雷达之间的相互干扰引起学者们的关注,文献[208-211]对毫米波雷达中的相互干扰抑制问题进行了研究。毫米波雷达的高距离分辨率、高多普勒分辨率能够获得目标细节信息,这些为目标识别奠定了基础,文献[212-214]对基于毫米波雷达的目标识别、姿态识别和手势识别进行了研究。
5 结语
本文对集中式MIMO雷达近20年来的研究工作进行了归纳与综述,内容涵盖集中式MIMO雷达基本原理、MIMO雷达发射波形设计、MIMO雷达接收信号处理等理论和方法,文中同时穿插介绍了集中式MIMO雷达当前的研究热点。对近年来在汽车辅助驾驶、安全防卫等领域得到广泛应用的时分毫米波MIMO雷达方面的相关理论与方法进行了较深入的讨论。上述内容的梳理和总结,希望有助于研究者了解和掌握集中式MIMO雷达的研究动态,并在MIMO雷达工程应用、新理论、新方法拓展等方面,对读者有所裨益。
限于作者水平,文中难免挂一漏万,不当处请读者批评指正。
