液压机械无级变速器的拖拉机速度控制研究
2022-11-01夏长高张演孙闫
夏长高,张演,孙闫
(212013 江苏省 镇江市 江苏大学 汽车与交通工程学院)
0 引言
变速器作为拖拉机动力传动的重要组成部分,其输出性能对拖拉机的燃油经济性、动力性和舒适性等有重要影响。由于传统的有级式变速器要求驾驶员需要针对拖拉机的不同工况做出相对的操作指令,所以其输出特性取决于驾驶员的操作熟练程度,不利于拖拉机的动力性和燃油经济性且增加了驾驶员的劳动强度。在配备HMCVT 的拖拉机上,这类问题会得到有效解决[1-2]。该类农业机械装备能有助于减轻驾驶员劳动强度以及操作难度,并能够提高拖拉机田间作业质量与效率。
近年来,对农业装备HMCVT 及其控制方法的研究已成为车辆工程领域热点。刘修骥与苑士华等人设计出一种等差两段式HMCVT 传动方案,并对HMCVT 传动系统的输出特性进行分析确定,对系统的无级调速、PID 控制的参数确定、HMCVT 模型的设计和仿真等方面做了大量研究[3-5];赵丁选教授团队设计出一种等比式三段液压机械传动系统方案,并建立数学表达式和仿真模型,对HMCVT输出特性进行仿真分析,确定了传动系统方案的合理性和实用性;提出合理的控制方法,通过改变液压回路中变量泵倾角,实现发动机动态工况下对车辆负载的合理应对[6]。
目前,虽然现有研究实现了HMCVT 输出特性的控制,但仍存在控制要求高、鲁棒性差等问题。因此,本文提出一种HMCVT 传动方案,确定传动参数,建立仿真模型,分析HMCVT 的输出特性。鉴于拖拉机在田间作业工况的复杂性,提出一种合理的基于粒子群优化算法(Particle Swarm Optimization,PSO)的PID 控制策略,以调节拖拉机的车速变化,实现拖拉机作业时保持匀速行驶状态,提高行驶速度的抗干扰能力,及应对外界环境或自身负载变化的速度突变的调节能力。
1 HMCVT 传动方案
拖拉机在田间作业时,其行驶速度会受到作业工况、负荷状态以及土壤条件等众多因素影响。拖拉机作业工况大致分为2 类:一类是在田间对农作物或土地作业;另一类为运输作业。前者工况下拖拉机行驶速度范围不大,一般为4~20 km/h;后者工况下速度范围需求较大,为6~50 km/h[7]。本文实验拖拉机的基本参数如表1 所示。

表1 拖拉机基本参数Tab.1 Basic parameters of tractor
由于拖拉机作业环境和负载情况复杂多变、速度变化范围较大,要求液压机械传动系统能根据不同工况做出输出转速转矩的改变,满足拖拉机针对不同工作条件的作业高效性、驾驶员操纵的方便性以及乘坐的舒适性。基于拖拉机速度分布和常用的HMCVT 工作段数量,一般将多段式液压机械无级变速器设计为5 段式,分为一个纯液压工作段和4 个液压机械混合工作段[8],其传动原理如图1 所示。
图1 中,i1~i9—固定齿轮副传动比;s1~s7——换挡同步器;K1、K2——行星齿轮排;1轴——系统输入轴,2 轴——中间轴,3 轴——换挡传动轴,4 轴——系统输出轴;P、M——变量泵与定量马达。构成由变量泵—定量马达容积调速回路、双行星排汇流机构组成的五段式HMCVT。HMCVT 各工作段的中同步器接合状态见表2。表2 中,“1”表示同步器处于接合状态,“0”表示同步器处于分离状态,“H”为纯液压工作段,“HM1~HM4”为液压机械混合工作段。一般将H工作段作为启动起步段,速度范围为0~4 km/h;将HM 工作段设为田间作业或运输工作段,速度范围为4~50 km/h。
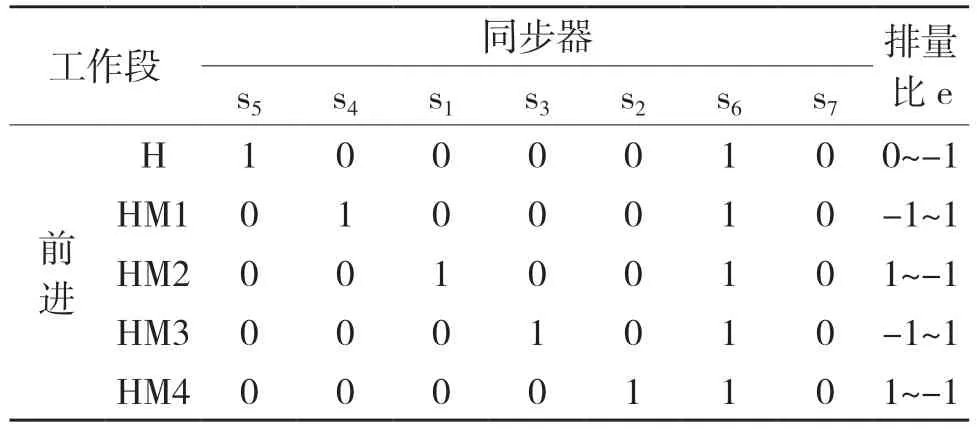
表2 液压机械无级变速器各工作段控制器状态Tab.2 Controller status of each working section of HMCVT
结合液压机械无级变速器传动原理图1 与表2液压机械无级变速器各工作段控制器状态,分析可知,在H 工作段,输入功率通过系统输入轴经固定齿轮副i1传递给液压回路,液压回路通过固定齿轮副i2传递到中间轴,同步器s5接合,功率可通过固定齿轮副i7传递到多挡传动轴,再通过多挡传动轴传递到固定齿轮副i8,接合同步器s6,功率便可传递到系统输出轴进行输出。各HM 工作段输出形式相同,这里以HM1 为例:输入功率通过系统输入轴经固定齿轮副i1分流,一部分传递给液压回路,另外一部分传递给机械回路,液压回路通过固定齿轮副i2传递到中间轴上,两部分回路功率通过行星排K2 上行星架进行汇流输出,HM1工作段同步器s4 接合,功率通过固定齿轮副i6传递到多挡输出轴,再通过多挡传动轴传递到固定齿轮副i8,接合同步器s6,功率便可传递到系统输出轴进行输出。
2 HMCVT 数学模型
2.1 HMCVT 各工作段速比的确定
各工作段的速比i 为在该段下HMCVT 的输出转速nO与输入转速nI的比值,根据上述的HMCVT 各工作段传动原理确定各工作段的速比。
在液压机械混合工作段中,2 种传动回路通过行星排机构汇流,在行星齿轮机构中太阳轮、行星架和齿圈运动方程如式(1)、式(2)[9]:
式中:nt,nq,nj——太阳轮、齿圈、行星架转速,r/min;Mt,Mq,Mj——太阳轮、齿圈、行星架转矩,N·m;k ——行星排联接特性参数。
在HM1 工作段内:
式中:e ——系统液压回路的排量比;np,nm——泵、马达的转速。
将式(3)、式(4)代入到式(1)确定HM1的速比为
同理:计算出其他工作段的速比,见表3。

表3 HMCVT 各工作段的速比Tab.3 Speed ratio of each working section of HMCVT
表3 中:k1,k2——行星排K1、K2 的连接特性参数。
2.2 HMCVT 传动系统参数确定
本文设计的拖拉机变速范围为0~50 km/h,传动系统各工作段速度分布情况:H 工作段为0~4 km/h,HM 工作段位为4~50 km/h,以此确定HM工作段传动比范围iR:
式中:neb——发动机额定转速,r/min;rd——驱动轮半径,m;iz,im——中央传动比、最终传动比;v——拖拉机理论行驶速度,km/h。
为使传动系统输出转速变化均匀,使拖拉机各挡位速度变化范围合理,一般而言,HMCVT 中HM 工作段的最大传动比与最小传动比的比值为一固定值的公比φ,即HMCVT 传动系统传动比分布满足等比分布[10]。
根据拖拉机HM1~HM4 工作段速度变化范围为4~50 km/h 可确定φ值:
根据表3 可确定出HM1、HM3 工作段速度变化范围:
同理,可确定出HM2、HM4 工作段速度变化范围:
式中:i1i2=1,整理式(7)—式(9)可得:
各工作段速度变化范围与传动比范围见表4。

表4 HMCVT 各工作段速度范围与速比范围Tab.4 Speed range and speed ratio range of each working stage of HMCVT
将表4 中速比值代入上述各工作段的速比公式中,确定出其他固定齿轮副传动比i3~i9值。这里以H 工作段为例确定i7,i8:
通过其余工作段速比确定i3~i6值,列入表5 中。

表5 液压机械无级变速器参数Tab.5 Parameters of HMCVT
3 HMCVT 的控制
3.1 HMCVT 的控制策略
拖拉机进行作业过程时,需要根据周围环境或自身负载来调节车速,可通过调节HMCVT 的排量比来改变系统输出转速,实现车速的调节[11-12]。因此需要设计出合理的控制策略以及控制方法以实现速度的调节。本文拖拉机HMCVT 控制策略流程图如图2 所示。
如图2 所示为拖拉机HMCVT 的控制策略。拖拉机处于初始状态时,其发动机油门开度和HMCVT 传动系统传动比为初始值,拖拉机按照初始速度为当前输出车速行驶。当拖拉机周围环境因素导致拖拉机需求行驶速度发生变化,或由于负载条件变化致使传动系统输出车速发生变化时,目标车速与输出速度不一,传动系统应进行对应调整,通过调节油门开度以适应拖拉机负载和行驶阻力变化,同时通过调节HMCVT 变速箱中液压泵—定量马达的排量比以输出拖拉机行驶车速,并再与目标车速进行比较。两者不等时,循环执行调节油门开度与排量比,直至与目标车速相同。
3.2 HMCVT 的控制器
HMCVT 传动系统是一个非线性的、动态的、复杂的系统,因此本文选择设计基于粒子群优化算法(PSO)的PID 控制器。利用PSO 算法对PID 控制器的参数进行优化设计,PID 控制器接受由PSO算法生成的3 个粒子作为其比例系数Kp、积分系数Ki和微分系数Kd,并在得到模型的输出性能后,以输出特性作为判断是否满足控制算法的终止条件,来决定是否更新PID 控制器的3 个参数的值,从而动态调整PID 控制参数,以达到优化系统,解决了PID 控制不能应用于非线性、动态的复杂系统的问题[12-14]。
图3 为基于PSO 算法的PID 控制下的拖拉机系统组成框图。图中,基于PSO 算法的PID 控制系统以速度偏差e(t)为输入,利用PSO 算法动态调节优化PID 控制参数,以实现对HMCVT 传动系统的控制,使系统实现对PID 的3 个参数进行自动校正。
在Simulink 仿真中将PSO 与PID 结合起来,以调节PID 的控制参数,组建HMCVT 的控制器,使HMCVT 传动系统具有良好的自适应性,实现拖拉机无级变速,提高拖拉机作业的行走性能。图4为基于PSO 算法的PID 控制系统。
4 HMCVT 模型与仿真
4.1 HMCVT 模型
HMCVT系统仿真模型主要有发动机仿真模型、变量泵—定量马达仿真模型、HMCVT 传动机构模型、HMCVT 换挡控制模型以及拖拉机动力学模型,将上述子系统模型组合构件HMCVT 传动系统[15]。对HMCVT 系统效率、液压回路排量比和拖拉机行驶车速等特性进行仿真分析,HMCVT 仿真系统如图5 所示。
4.2 仿真结果
HMCVT 传动效率是衡量HMCVT 传动系统优劣的重要因素,效率特性曲线如图6 所示。
由于HM 工作段前半段时存在功率循环,所以HM 工作段前半段传动效率会低于后半段传动效率。在HM 工作段内中间处,排量比e=0,此时系统的功率传递为纯机械传动,系统的传动效率达到最大值。总体上,HM 工作段传动效率都介于0.8~0.85 之间,有着较高的传动效率。
拖拉机工况一般分为田间作业和运输作物,所以对两种工况下的车速进行仿真分析,将拖拉机田间作业行驶目标速度设为6 km/h;拖拉机在运输时的行驶目标速度设为25 km/h。图7(a)、图7(b)分别为拖拉机在田间作业和运输作物时的车速变化曲线。
由图7(a)、图7(b)可知,拖拉机在田间作业和运输作物时,车速在基于PSO 算法的PID控制下时,都有着较快的响应速度,无明显波动,能快速到达设定的目标车速;而传统PID 控制下的行驶车速响应速度较慢,且变化曲线都存在着波动和较大的超调量。田间作业车速仿真时,在拖拉机作业工况15 s 处,对行驶速度进行微调处理,两种控制算法下系统能快速响应,且超调量差距不大。
拖拉机在田间作业时,不仅会随着收集农作物导致自重增加,也会由于田间路况复杂如土壤变化导致行驶阻力发生改变,从而拖拉机行驶速度也会发生改变。图8 为当拖拉机的负载发生变化时行驶速度的变化曲线。
由图8 可见,在第5 s 时,为系统施加负载,拖拉机行驶速度变化不大。仿真结果表面,拖拉机在基于PSO 算法的PID 控制器下,当行驶车速发生变化时能快速调节实时车速,降低速度变化的幅度,维持匀速行驶状态,具有更好的鲁棒性,其控制下的拖拉机有着更佳的自适应行驶性能。
5 结论
液压机械无级变速器在大功率拖拉机上具有广阔的应用前景。本文提出一种5 段式液压机械无级变速器,实现拖拉机大范围无级变速功能和动力需求,并对HMCVT 传动方案进行特性分析与仿真研究,相应地提出控制策略,利用基于PSO 算法的PID 控制器优化HMCVT 的输出特性。通过仿真研究,主要得出以下结论:
(1)所设计的5 段式液压机械无级变速器能满足拖拉机大范围速度需求,实现拖拉机无级变速功能和满足大功率拖拉机的功率需求。
(2)设计的控制策略能够使HMCVT 传动系统处于最优状态,使得系统的输出特性能针对拖拉机环境做出最佳调整。
(3)基于PSO 优化的PID 控制器有着较好的自适应性和鲁棒性,能使拖拉机有着较好的加速性能、更快的车速响应以及保持车速性能。
