飞机发动机转速采集电路设计及故障分析
2022-10-31田琳宇王建生
田琳宇,张 波,王建生
(1.航空工业西安航空计算技术研究所,陕西 西安 710065;2.航空工业沈阳飞机设计研究院,辽宁 沈阳 110035)
0 引言
某型机载远程接口单元(RIU)[1]主要完成液压分系统压力监测、动力装置系统状态监测、飞机舱火警探测等功能。DIO模块是RIU中的重要组成部件,可实现精密小信号的采集、模拟量离散量的采集、模拟量离散量的输出等功能。DIO模块中采集的一路模拟量为飞机发动机转速信号。DIO采集发动机转速信号后,RIU向航电系统[2]和飞参系统上报采集信号。飞行员可根据显示的转速信号控制油门等。因此,转速信号的准确采集对保证正常飞行,保障飞行员生命安全起着至关重要的作用。
本文主要就DIO模块中实现飞机发动机转速采集功能进行电路优化设计分析,并就实际工程中遇到的信号频率过大后将不能准确采集的故障模式,通过实验仿真进行故障定位及分析。
1 转速采集电路设计
远程接口单元中DIO模块主要实现对模拟量和离散量的输入输出功能。飞机转速信号输入为0~10 V、0~3300 Hz的正弦波模拟信号,要想采集飞机转速,就需要得到0~10 V正弦波的频率。因此,DIO模块中要实现对飞机转速的采集首先要采集0~10 V正弦波,再将其转化为方波,以便作为电压-频率转换器的输入,输出频率。因此,转速采集电路由0~10 V采集电路和方波转换电路组成。具体电路如图1所示。
0~10 V采集电路由滤波、钳位电路、二级低通滤波以及跟随电路组成。
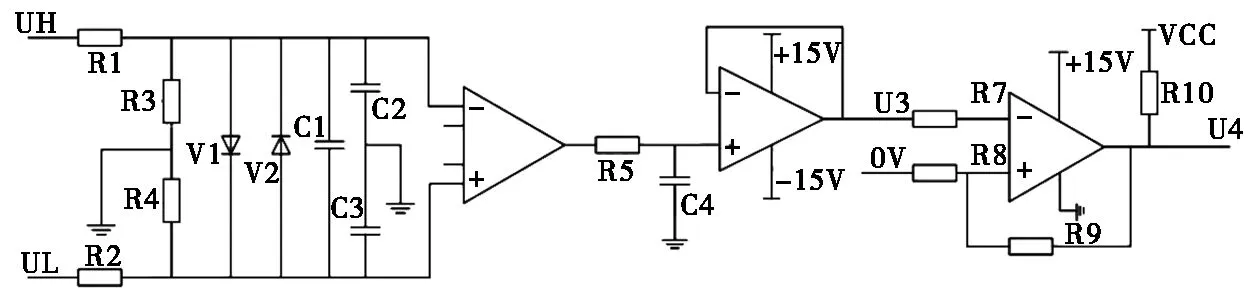
图1 0~10 V电压采集电路图
UH和UL是输入的一对正弦差分信号,其经过抑制输入信号的差模、共模干扰,在差分输入信号间增加RC电路,各器件参数根据工程经验而得。
二极管V2与二极管V1分别组成正向和负向钳位电路,两个二极管导通后的压降为0.7 V,因此钳位电路可将输入信号钳位到±0.7 V,防止输入电压可能超过后面电压跟随的供电+15 V。之后经过二级低通滤波以及跟随电路。
方波转换电路利用一个比较器搭建迟滞电压比较电路[3]将信号转化为方波。电压比较器的基准电压为地,即0 V。该迟滞比较器的迟滞范围为0.13 V,当输入电压大于0.13 V时,输出为低电平,0 V;当电压小于0 V时,输出为高电平,VCC(5 V)。
2 工程实际中的故障分析
经外场反馈故障,远程接口单元对左发动机转速采集有误。具体表现为,当输入频率小于2300 Hz时,RIU可正常采集到相应频率;当输入频率大于等于2300 Hz时,RIU将采集不到相应频率。
2.1 故障定位
针对上述问题,对转速采集电路进行测试分析,确定故障源。
输入正弦波峰值为10 V,频率为2300 Hz时,示波器波形如图2所示。
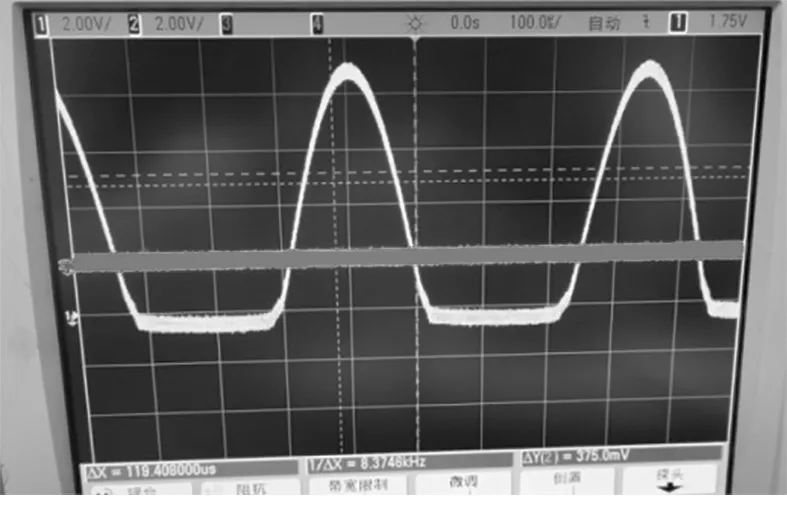
图2 2300 Hz/10 V正弦波输入下示波器波形1
其中,示波器1表笔为经钳位电路后的输出波形,2表笔为比较器输出波形。
更换位置测量波形,进行验证对比。如图3所示。其中,示波器1表笔为比较器输入端,2表笔为比较器输出端。

图3 2300 Hz/10 V正弦波输入下示波器波形2
由图2和图3可以看出,输入正弦波经过钳位电路,仅有负电压被钳位至-0.7 V,而正电压并未被钳位。致使该钳位波形经过二次滤波放大为图3中1表笔波形,几乎整个波形均在0 V电压之上,无小于0 V电压。因此,比较器根据基准电压0 V,并不会输出高电平,仅为一条0 V电压波形,如图3中2表笔波形所示。
综上分析,怀疑V1位二极管并未发挥作用,可能存在断路。二极管故障导致负向钳位电路失效,无法将电压钳位至0.7 V。测量V1二极管静态特性,将所有电缆拔除,仅留单独的DIO模块。万用表调置二极管档,测量显示为开路。因此确定该故障为V1断路所致。更换V1后,波形正常,故障消失。
2.2 故障分析
采集故障仅在频率大于等于2300 Hz时才会出现,而小于2300 Hz时则故障不会出现。因此,下面将分析输入信号频率的变化可能对故障的影响。
现输入一2220 Hz的正弦波,峰值仍为10 V。示波器测量比较器输入和输出波形如图4所示。其中,示波器1表笔为比较器输入波形,2表笔仍为比较器输出的方波。
结合2300 Hz输入时的波形图分析,频率为2220 Hz时,虽然输入波形正端没有被钳位,经放大滤波后,比较器输入端波形仅有很短时刻电压在0 V以下,与之对应的比较器输出仅有在输入波形小于0 V时表现为高电平,高低电平变换可正常测量出频率。

图4 2220Hz/10V正弦波输入下示波器波形
这是因为频率小时,周期变长,则比较器输入波形小于0 V的时间就会变长,可成功采集到通过比较器输出的高电平。随着频率增加,当频率为2300 Hz时,比较器输入波形小于0 V的时间缩减为0,就不能输出高电平。因此,在负向钳位二极管故障的情况下,频率增高至一定阈值时,采集故障出现。
经实验可知,输入信号的频率变化确会对故障造成影响。那么输入信号的幅值是否也会对故障有所影响。现改变正弦波幅值,观察幅值对故障结果的影响。输入一个正弦波,峰值为9 V,频率为2300 Hz,示波器测量波形如图5所示。其中示波器1表笔为比较器输入波形,2表笔为比较器输出波形。

图5 2300 Hz/9 V正弦波输入下示波器波形
对比图5和图3,进行分析,在输入正弦波的幅值变小后,同样频率下,与10 V幅值正弦波比较可以看出,比较器输入端波形处于0 V以下的时间变长,相应的比较器输出的高电平较为明显。这是因为输入信号幅值变小后,经过二次滤波,负电压被滤掉的部分变少,处于0 V以下的电压变多。因此输入信号幅值越小,故障越不容易复现。
3 电路优化设计及分析
以上讨论的输入均为电压偏移为0的正弦信号,但实际可能会出现存在电压偏移的正弦信号,在该情况下,如单极性正弦输入时,经过正负向钳位后就会不存在0.7 V的正负变换。针对以上采集局限性,在输入信号的电阻后增加两个隔直电容C5、C6,使隔直后波形为电压偏移为0的正弦信号[4]。具体电路图如图6所示。

图6 0~10 V采集电路优化设计
进一步分析该优化电路,当出现上一节所述故障,即钳位二极管V1断路时,各测试点波形如图7所示,其中1表笔波形为钳位后波形,2表笔波形为比较器输入,3表笔波形为比较器输出方波。

图7 优化电路下V1二极管故障时的各测试点波形
从图7中看出,钳位后的波形随着时间增长,幅值越来越大,导致滤波后的比较器输入信号也在增大,逐渐往上偏离0 V电压。刚开始比较器还可以输出高电平,之后一直为低电平。因此,在频率2000 Hz下,开始故障不会显现,随时间增长故障就会出现。分析原因,以上情况可能为C5、C6电容充电导致。V1故障后,电流仅经过V2通路逆时针回流对C5、C6充电;同样V2故障后,电流仅经过V1通路顺时针回流对C5、C6充电。对比之前电路,当V1或V2二极管故障时,只有输入频率到达一定程度,故障才会显现。优化后的电路,不仅可以解决了原有电路采集的局限性,还可提早发现二极管故障,不必等到频率升高才会显露问题。
4 结语
本文主要就飞机发动机转速信号采集进行电路设计分析。针对工程实际中的采集故障,进行试验分析,对故障进行定位,并分析输入信号对故障复现的影响。实验分析可知,输入信号的幅值越高,频率越大故障越容易复现。然后针对电路对输入信号的电压偏移不为0时的采集局限性问题,进行电路优化。经过仿真分析,优化电路可解决该问题,还可以尽早的发现钳位二极管故障,提高安全性。