彩虹-4无人机航磁三分量测量系统研发及应用研究
2022-10-31郭华王明姚雨暘常畅
郭华, 王明, 姚雨暘, 常畅,4
1 中国自然资源航空物探遥感中心, 北京 100083 2 吉林大学, 长春 130026 3 中国地质大学(北京), 北京 100084 4 中国地质科学院地质研究所, 北京 100037
0 引言
作为新兴产业的无人机航空物探在基础地质调查、能源资源调查、矿产勘查等领域具有广阔的应用前景,受到了许多国家普遍关注并相继开始了基于固定翼或直升机的无人机平台的航空地球物理勘探相关的装备研发(Lum et al., 2005; Kurvinen et al., 2005; Partner, 2006; 张洪瑞和范正国, 2007; 熊盛青, 2009; Pöllänen et al., 2009; Barnard, 2008, 2010; Koyama, 2013; Laliberte, 2013; Hitoshi et al., 2013; Stoll, 2013; 于显利等, 2012; 李文杰等, 2014; 胥值礼等, 2016; 郭华和谢宏,2018;李飞等, 2018;张富明等,2019;鞠星等,2020a,b;谢小国等,2021).无人机航空物探技术在国外的发展以及相关应用相对国内成熟度较高,已经在许多领域开展了试验或应用(李文杰等, 2014);近十年国内中国自然资源航空物探遥感中心、中国地质科学院及中国科学院遥感与数字地球研究所、中船重工第七一五研究所等多家单位先后开展的基于固定翼或直升机的无人机航磁测量技术的研究工作尚处于研究阶段.2012—2015年,为满足国内地质调查和矿产资源勘探的迫切需求,中国地质调查局组织中国地质科学院地球物理地球化学勘查研究所、核工业航测遥感中心和航天空气动力技术研究院等多家科研单位共同研制完成了世界上第一套基于“彩虹-3”无人机航空地球物理勘探的综合测量系统,自此无人机开始了在地质资源调查领域的民用征程.基于“彩虹-3”无人机航空地球物理勘探测量系统相对于以往的航空地球物理勘探测量系统具备较强的环境适应能力、较高的安全保障、优秀的夜航巡航能力,目前为止在我国及赞比亚等地“彩虹-3”无人机航空地球物理综合测量系统累计完成16.5万测线公里的调查任务,填补了国内外无人航空地球物理测量领域装备的空白(中国地质科学院, 2014; 郭华和谢宏, 2018).
“彩虹-4”无人机是中国航天科技集团公司下属的航天彩虹无人机股份有限公司在“彩虹-3”无人机基础上研发的一种中程察打/侦察探测(民用版)一体无人机;其性能上,较“彩虹-3”无人机有了很大的提升(http:∥baike.baidu.com/view/9615585.html),其翼展18.0 m,最大起飞重量1330 kg,最大使用半径2000 km,轻载100 kg时航时约30 h,最大装载量可达345 kg,航时约12 h,是中空长航时无人机(鞠星等,2020b;崔志强等,2016),但其作为无人机航空物探搭载平台在国内外行业领域内属于空白.在航空磁测领域,与传统的航空磁总场测量相比,矢量测量所获得的地磁场模量大小和方向信息能够有效减少反演的多解性,提高地下磁性异常体的探测精度(林君等,2017).对于航空磁矢量测量,国内外相继开展了相关的研究(Christensen and Dransfield, 2002;孙昂等,2017;Xie et al., 2020),而基于“彩虹-4”固定翼无人机航磁三分量测量系统的研发在国内外也属于首次.
中国自然资源航空物探遥感中心在国家重点研发项目“航空磁场测量技术系统研制”支持下,与吉林大学、中国航天空气动力技术研究院以及中国地质科学院物化探研究所等多家科研院所合作首次开展了“彩虹-4”无人机航磁三分量测量系统研发工作.通过开展“彩虹-4”无人机平台改装与系统集成、无人机航磁三分量磁补偿等核心和关键技术研究,以及飞行测试试验(飞行平台静态干扰测试、飞机磁本底测试、高空八边形磁干扰补偿飞行、低空重复线飞行以及实际测区飞行)等工作,成功地获取了高质量的“彩虹-4”无人机磁本底数据和无人机三分量磁测数据.2019年在国内西北某地圆满完成试验飞行,“彩虹-4”无人机航磁三分量测量系统各项指标满足《航空磁测技术规范》(DZ/T 0142-2010)(中华人民共和国国土资源部, 2010)的要求,测量精度达到25 nT的长航时、大航程、超视距、高精度飞控设计指标,填补了国内外“彩虹-4”无人机航磁三分量测量装备的空白,形成了一套高安全、高效率、高质量、全天时、长航时、超低空的智能化“彩虹-4”无人机航磁三分量测量方法技术,为我国地质调查和矿产资源勘探增添了先进、安全、可靠的技术和装备,促进了我国基于无人机的航空物探勘探产业的进一步发展,研究成果具有很好的应用前景.
1 测量系统组成
1.1 航磁三分量测量原理
图1所示,地磁场7要素T(地磁场总强度)、X(地磁场北向分量)、Y(地磁场东向分量)、Z(地磁场的垂直分量)、H(地磁场水平分量)、I(地磁倾角)、D(地磁偏角)空间关系为:

图1 地磁要素示意图Fig.1 The diagram of seven elements of geomagnetic field

根据坐标系不同,可以将7个分量划分为:直角坐标系中有X、Y、Z,球坐标系中有H、I、D,柱坐标系中有Z、H、D;测得其中一组就可以求出其他分量(王一,2015).
1.2 系统组成
“彩虹-4”无人机航磁三分量测量系统主要由“彩虹-4”无人机平台、三分量磁力仪、光泵磁力仪、高精度惯导系统、高度计、数据采集和收录系统组成,如图2所示.

图2 “彩虹-4”无人机航磁三分量测量系统组成示意图Fig.2 The diagram of aeromagnetic three-component detction system for CH-4 UAV
1.3 三分量磁力仪
三分量磁测系统所用三轴型号是英国Bartington公司生产的Mag-03MS100,性能指标详见表1;惯导系统采用的是加拿大NovAtel公司生产的SPAN-IGM-S1,性能见表2.

表1 三轴磁力仪性能指标Table 1 Performance index of triaxial magnetometer

表2 惯导系统性能指标Table 2 Performance index of inertial navigation system
2 系统试验测试
2.1 飞机磁本底测试
无人机的机体是由铁磁性材料和非铁磁性材料构成的,铁磁性材料是机体上的主要磁干扰源.首先,为了最大限度消除机体上的磁干扰,我们采用铝合金、碳纤维复合材料等无磁性材料对无人机进行改装;其次,测试无人机的磁本底数据,以便确定三分量磁测系统安装位置.根据机体的长度和宽度设计的测量区域为18 m×12 m,网格化间隔为1 m,共216个测点(高全明, 2020).
无人机机体磁本底测量共分三步:第一步在没有无人机停放的情况下,利用光泵磁力仪测量216个测点的地磁场强度和对应点的磁日变数据;第二步在无人机停放的情况下,重复第一步的操作;第三步利用第二步测量的磁场数据减去第一步测量的磁场数据和磁日变数据,即为无人机机体磁本底数据(图3).

图3 “彩虹-4”无人机机体左半部分磁本底测试结果Fig.3 Magnetic background test results of left half for CH-4 UAV
2.2 飞机发动干扰测试
测试无人机在飞行过程,发动机对三轴磁力仪产生的磁干扰影响.主要测试和分析无人机的发动机处于“停止”、“启动”和“临飞”三种状态下产生的磁干扰情况 (高全明, 2020),如图4所示.

图4 发动机在不同工作状态下的磁干扰曲线Fig.4 The curve of magnetic interference for CH-4 engine under different working conditions
从图4中可以看到,当无人机的发动机启动过程中,磁场曲线上会出现一个明显地“阶跃响应”变化,这个变化随着无人机的发动机转速的提升而不断增大,直到发动机转速达到“临飞”状态后开始趋于平稳,整个过程测量的数值,变化幅度约为60 nT.因此,当无人机的发动机转速保持不变或匀速飞行状态时,可视为其产生的磁干扰源是稳定.
2.3 重复性飞行测试
重复线飞行测试的目的是为了检验“彩虹-4”无人机航磁三分量磁测系统的动态性能 (高全明, 2020),进而保证磁测数据的质量;重复线飞行测试是以测线和重复线测量的磁测数据曲线的重合度为量化评估指标.
图5所示为两条重复测线飞行轨迹,长度约30 km,偏移距离不超过20 m,平均飞行高度分别为612.03 m和605.18 m,高度偏差小于7 m.

图5 重复线试验飞行航迹图Fig.5 The diagram of repeated line test flight
图6所示为重复线试验获取的航磁三分量数据对比结果.从图中可以直观地看出两条重复线上对应点的x、y和z分量的磁测数据曲线变化趋势有较好的重合度,内符合精度ε分别为5.43 nT、11.61 nT和11.19 nT;试验结果验证了基于“彩虹-4”无人机的航磁三分量测量系统具有很好的一致性和稳定性.
2.4 磁补偿飞行试验
磁补偿飞行试验是将未进行磁补偿处理的航磁x、y、z三分量数据由机体坐标系转换到空间地理坐标系下 (高全明, 2020),如图7所示.图中显示出,坐标转换后三分量数据变化幅度很明显,主要是由机体产生的磁干扰所导致的,特别是z分量数据变化幅度尤为明显,这说明了进行磁补偿是十分必要的.
根据《航空磁测技术规范》(DZ/T 0142-2010)(中华人民共和国国土资源部, 2010),磁补偿飞行试验在敦煌市机场附近磁场变化稳定的区域进行,磁场梯度值不超过60 pT/m,磁环境满足磁补偿飞行试验要求.在磁补偿飞行试验中“彩虹-4”无人机按照顺时针方向沿着0°→90°→180°→270°和45°→135°→225°→315°的矩形闭合框飞行(图8),边框的航线的长度约为16 km,平均飞行高度为3974.46 m,高度变化小于15 m;在每一边上依次完成航向、横滚和俯仰三个补偿飞行动作,运动幅度变化为±5°(图9),用时约40 min.如图10所示,磁补偿飞行时惯导系统记录姿态角度的变化情况.
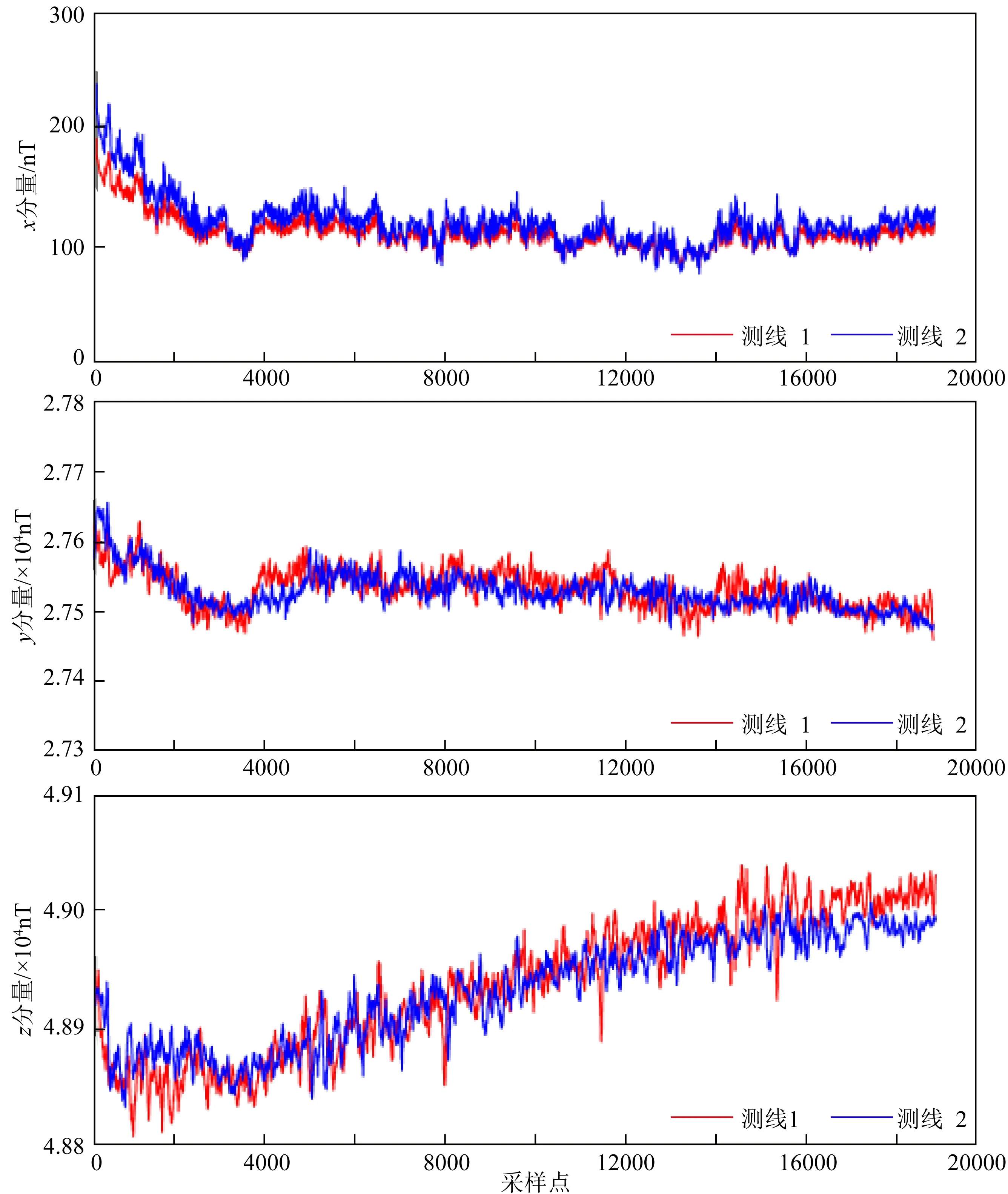
图6 航磁三分量数据重复性对比图Fig.6 The comparison diagram of repeated lines for aeromagnetic three-component

图7 坐标转换前后航磁三分量磁测数据对比图Fig.7 The comparison diagram of before and after coordinate transformation for aeromagnetic three-component
同时,为了评价航磁三分量磁补偿方法的可靠性,文中采用了布谷鸟搜索算法进行计算,并分别与基于无迹卡尔曼滤波算法(UKF)和遗传算法(GA)的磁补偿方法进行对比分析 (高全明, 2020),结果如图11所示.按照《航空磁测技术规范》(DZ/T 0142-2010)(中华人民共和国国土资源部, 2010)的要求,应用CS补偿算法的航磁x、y、z三分量的动态四阶差分噪声水平均小于25 nT,并且从异常曲线可以看出,补偿后的曲线更平滑,补偿效果更加明显.

图8 磁补偿飞行轨迹示意图Fig.8 The diagram of magnetic compensation flight

图9 磁补偿飞行时飞机动作示意图Fig.9 The diagram of aircraft action during magnetic compensation flight
3 实际飞行试验
在敦煌机场附近开展区域磁测飞行试验,测线轨迹如图12所示,共飞行了6条测线,每条测线长度约为10.7 km,线距为520 m,飞行高度约450 m,高度偏差不超过20 m,满足《航空磁测技术规范》(DZ/T 0142-2010)(中华人民共和国国土资源部, 2010)规范要求.

图10 “彩虹-4”无人机磁补偿飞行姿态角度变化Fig.10 The diagram of magnetic compensation flight attitude angle change for CH-4 UAV
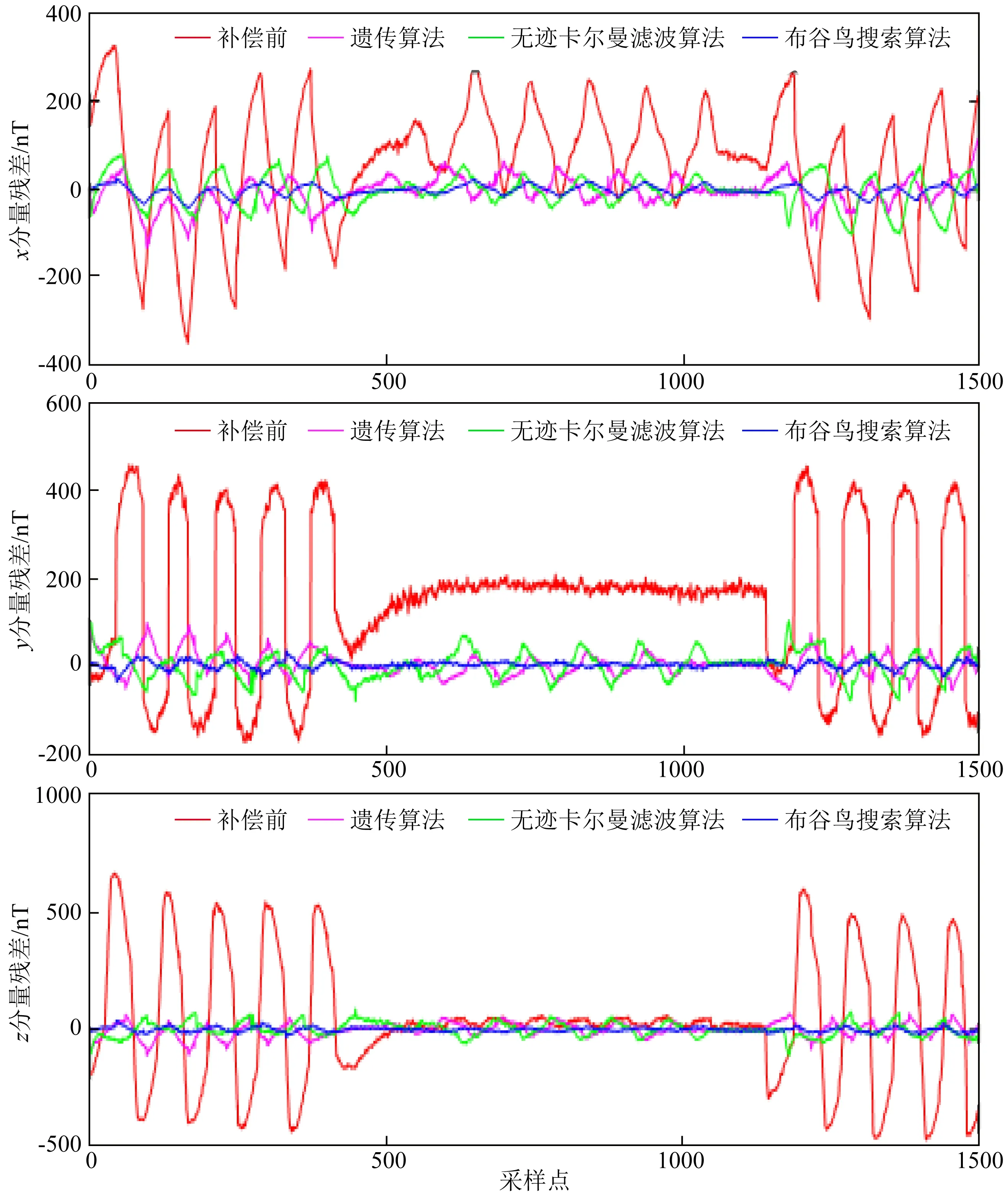
图11 磁干扰补偿结果Fig.11 The diagram of magnetic interference compensation results
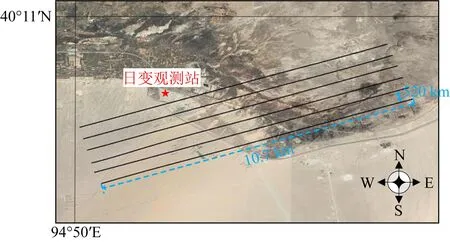
图12 实际飞行试验测线轨迹示意图Fig.12 The diagram of line distribution in actual flight test

图13 磁补偿前航磁三分量合成总场剖面图Fig.13 The profile of total field calculated by aeromagnetic three-component before magnetic compensation
图13为未进行磁补偿处理的航磁三分量磁测数据合成总场剖面图.可以看出,由每条测线的航磁三分量数据转换的航磁总场曲线变化幅度较大、规律性和相关性差.
为了评估航磁三分量数据的精度,我们将由磁补偿处理后的航磁三分量数据转换的总场数据与同机CS-3铯光泵磁力仪测得的航磁总场数据进行对比分析.图14显示了分别经过磁补偿处理与日变改正的实测总场数据与三分量合成总场数据,航磁三分量数据换算的磁总场变化趋势与实测磁总场变化整体趋势基本一致,异常幅值、异常形态与实测总场吻合;但前者在梯度过渡带内的磁梯度变化更强烈、主要是由磁干扰补偿处理与各项误差校正不彻底导致的.同时,数据的显示的梯级带由测线飞行高度差异所引起,因此,需要做进一步的调平等处理.

图14 航磁总场数据对比(a) 实测的航磁总场数据; (b) 航磁三分量数据换算的总场数据.Fig.14 The comparison diagram of aeromagnetic total field obtained by different methods(a) Total field measured by optical-pump magnetometer; (b) Total field calculated by aeromagnetic three-component.

图15 航磁三分量磁测数据等值线图(a) x分量等值线图; (b) y分量等值线图; (c) z分量等值线图.Fig.15 The contour map of aeromagnetic three-component magnetic(a) The contour map of x component; (b) The contour map of y component; (c) The contour map of z component.
图15所示为航磁x、y、z三个分量的磁场等值线图.由图15a和图15b的磁场特征可以看出,沿着北东向存在一个明显的航磁梯度变化带,与图14中航磁总场反映的梯度变化带保持着很好对应关系;图15c中z分量的磁场特征与图14中航磁总场特征相比,二者的变化趋势一致且高度吻合.因此,航磁三分量数据不但可以很好的表征航磁总场特征,还能提供丰富的x、y、z三个方向的磁场分量信息.基于彩虹-4固定翼飞行平台的航磁三分量测量系统的成功试验飞行,获取了高精度实测三分量数据集,为后续的反演与解释工作提供丰富的数据基础,有效降低反演的多解性.同时,依托彩虹-4固定翼无人机长航时、适应夜航、大载重、超低空、适应无磁化改造等特性,此航磁测量系统的研发对于我国大面积、实用化的航磁多参量测量飞行具有十分重要的意义.
4 结论
通过技术攻关,我国首次成功地将“彩虹-4”无人机改装集成应用到航空物探领域,首次成功地研发出基于“彩虹-4”无人机平台的航磁三分量测量系统,填补了国内外航空地球物理勘探领域内装备的空白.实际试验飞行验证了“彩虹-4”无人机航磁三分量测量系统各项指标满足《航空磁测技术规范》(DZ/T 0142-2010)(中华人民共和国国土资源部, 2010)要求,测量精度达到25 nT的长航时、大航程、超视距、高精度飞控设计指标,形成了一套高安全、高效率、高质量、全天时、长航时、超低空的智能化“彩虹-4”无人机航磁三分量测量方法技术,为我国地质调查和矿产资源勘探增添了先进、安全、可靠的技术和装备,促进了我国基于无人机的航空物探勘探产业的进一步发展,研究成果具有很好的应用前景.
致谢本文研究工作得到了中国地质科学院物化探研究所刘俊杰高级工程师、吉林大学赵静教授、高全明博士的大力支持,在此表示衷心的感谢.
