单行星排式混合动力汽车控制策略仿真及应用
2022-10-30曲春燕叶欢陈皓梅娜闫伟
曲春燕,叶欢,陈皓,梅娜,闫伟
(1.250011 山东省 济南市 山东大学 能源与动力工程学院;2.300300 天津市 中汽(天津)汽车工程研究所)
0 引言
中国的汽车销量近年来稳居世界第一,为中国GDP 的增长做出了重大贡献。另一方面,燃油车保有量的持续增加,其尾气污染严重、对石油燃料依赖性强等问题日渐突出。为缓解上述情形,燃油车排放法规日益严格,而新能源汽车由于其经济性好、动力性强和污染物排放少等特点成为了当前车辆研究的热点。
新能源汽车可以分为纯电动汽车(Electric Vehicle,EV),混合动力汽车(Hybrid Electric Vehicle,HEV)和燃料电池汽车(Fuel Cell Vehicle,FCV)。其中,EV 采用单一动力电池储能,向电机放电,驱动电机旋转进而带动整车运转[1]。虽然EV 可实现零污染物排放并且结构简单,但是动力电池能量密度低、成本高、续驶里程短、充电时间长等问题使其经济规模相对不足。FCV 虽然不产生有害排放物、能量转换效率高,但是其发展过程中仍存在许多技术挑战,如部件成本过高、储氢设备不完善等[2]。HEV 结合了EV 的电池、电机和传统汽车的发动机,燃油经济性高,动力性好,是传统汽车向EV 过渡阶段的理想产品[3]。HEV 可以分为:串联式,并联式和混联式。行星齿轮系HEV 是常见的混联式结构,一般用行星齿轮系将发动机输出功率一部分分配给车辆,剩余分配给电机发电并进行储存。
本文基于AVL-Cruise 软件中自带的单行星排式HEV 模型,在MATLAB R2014a 的Simulink 平台上搭建了逻辑门限值控制策略,通过dll 文件实现了Cruise 和Simulink 的联合仿真,进行了循环工况和动力性计算,验证了该控制策略的合理性。
1 整车仿真模型搭建
1.1 整车参数选择要求
基于AVL-Cruise 软件中自带的某单行星排式HEV 模型和需求驾驶性能,对整车参数进行匹配,并对发动机、电机、电池和其他传动部件选型匹配。整车参数来源于参考文献[4],如表 1 所示。
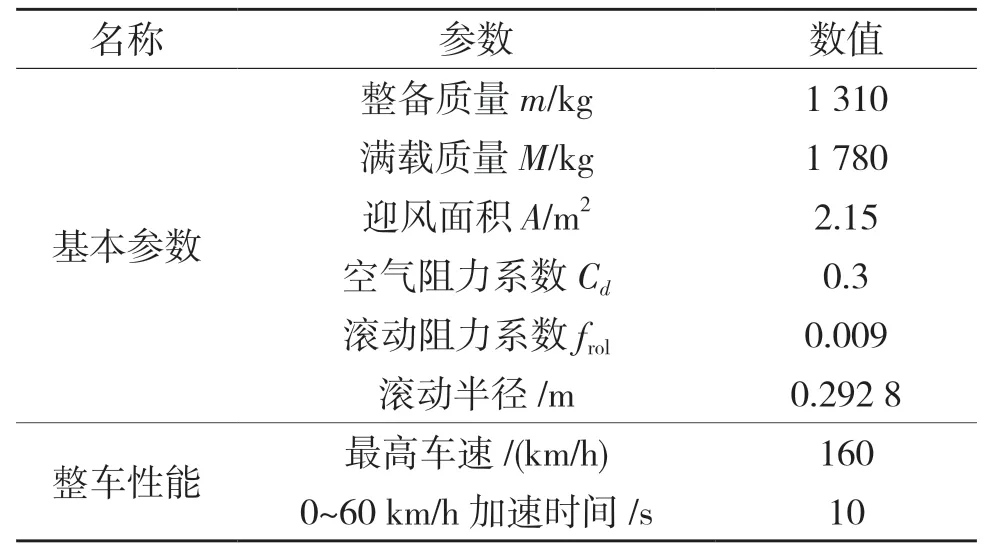
表1 整车参数Tab.1 Vehicle parameters
1.2 HEV 部件参数选择
1.2.1 发动机参数选择
本单行星排式HEV 采用了最大功率为63 kW(5 000 r/min),排量为1.46 L 的四缸汽油机。由于该模型的发动机全负荷速度特性曲线中的工况点较少,且发动机的转速和转矩为二次函数关系,对现有数据拟合关系式得到式(1):
式中:T——发动机扭矩;n——发动机转速。
HEV 中,发动机是主要动力,电机是辅助动力,合适的发动机和电机功率比例是保证HEV 动力性的关键。功率适中的发动机应满足汽车在水平路面行驶中按需求车速行驶的最大功率[5],见式(2):

式中:Pmax——HEV 需求的最大输出功率;vmax——最高需求车速;ηt——HEV 传动效率,取0.8;m——整车满载质量,取1 780 kg;g——重力加速度;f——滚动阻力系数;Cd——风阻系数;A——汽车挡风面积,取2.15 m2;α——路面坡度。
将路谱中最高车速代入式(2),计算得到最大功率为56 kW,本模型的发动机功率为63 kW,纯发动机模式下可以满足驾驶需求。
1.2.2 电机参数选择
在行星齿轮系中,行星架连接发动机,太阳轮连电机1(MG1),后排齿圈连电机2(MG2),行星齿轮系实现这3 个部件的转矩分配,如图 1 所示。
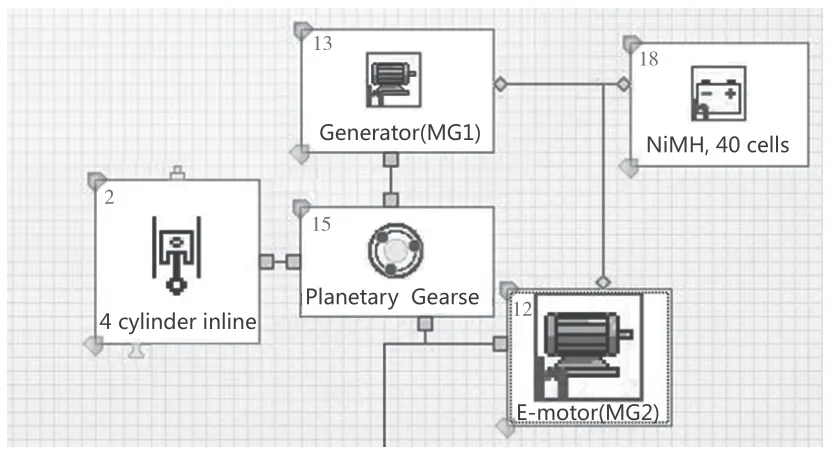
图1 行星齿轮系结构Fig.1 Structure of planetary gear train
电机1 主要是作为发电机为电池充电并调节发动机转速。当电机1 反拖发动机转动时,其转矩关系满足式(3)。

式中:k——行星齿轮系结构参数;TMG1_max——电机1 最大转矩;TEng_min——发动机最小启动扭矩,取其怠速扭矩93 N·m;nMG1_max——电机1 最大转速;nEng_min——发动机启动转矩下对应的转速,取其怠速转速720 r/min。
由式(3)计算得电机1 的技术参数nMG1_max>3 600 r/min;TMG1_max>38.23 N·m,PMG1_max>14.41 kW。
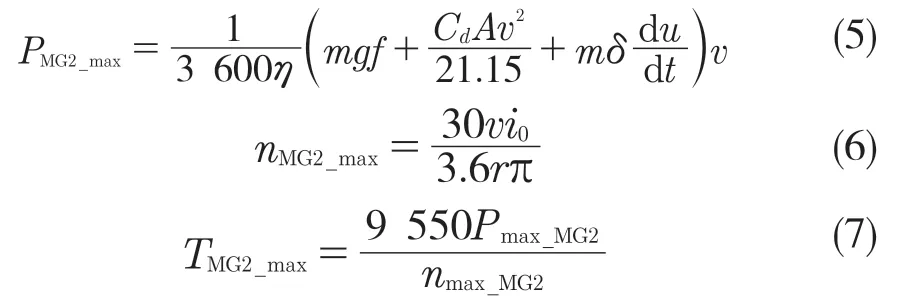
本模型电机2 的技术参数:最大功率30 kW,最大扭矩350 N·m,最大转速8 000 r/min。电机2 通过后排齿圈直接与车轴连接,因此电机2 转速不能为0,且需大于车辆最高速度行驶时的匹配电机2 转速。

式中:i0——主减速器速比;vmax——最高车速;r——车轮半径。
电机2 的最大转速由式(4)计算可得nMG2_max>5 653 r/min。
纯电动模式下,电机2 的输出功率需驱动HEV 6 s 之内由0 加速到30 km/h。将整车参数代入式(5)—式(7)计算得到电机2 的技术参数:nMG2_max=1 060 r/min,TMG2_max=249.29 N·m,PMG2_max=27.67 kW。经验证,电机2 可满足该模型的驾驶需求。
1.2.3 电池参数选择
本模型电池为镍氢电池,功率为40 kW,电池容量为6.5 A·h。HEV 运行在纯电动模式时,电池的输出功率不低于电机的最大功率,由式(8)计算得到电池功率Pbat=40 kW。经式(8)验证,本模型的电池可满足驾驶需求。

式中:Pbat——动力电池功率;Pmax——电机最大功率;ηb——能量转化效率;ηm——电机工作效率,取0.85;Cbat——电池容量,We——电池能量密度,取46 (W·h)/kg;Wp——电池比功率,取1 000 W/kg;U——电池端电压,取值288 V。
1.2.4 传动比选择
基于选择的电机参数,电机1 反拖发动机时,提供的扭矩经过行星齿轮系后须不能低于发动机的启动的最小转矩,转矩转速的关系满足式(3)。分析计算得到主减速器的速比i0取值范围为3.0~4.4,k取值范围为2.4~3.0。经过参数组合优化后,取i0=3.9,k=2.6。
1.3 整车仿真模型搭建
采用AVL-Cruise 自带的单行星排模型,选择合适的元件进行连接,搭建的整车构型如图2 所示。其中,MATLAB Controller 是实现AVL-Cruise和Simulink 联合仿真的连接端口。
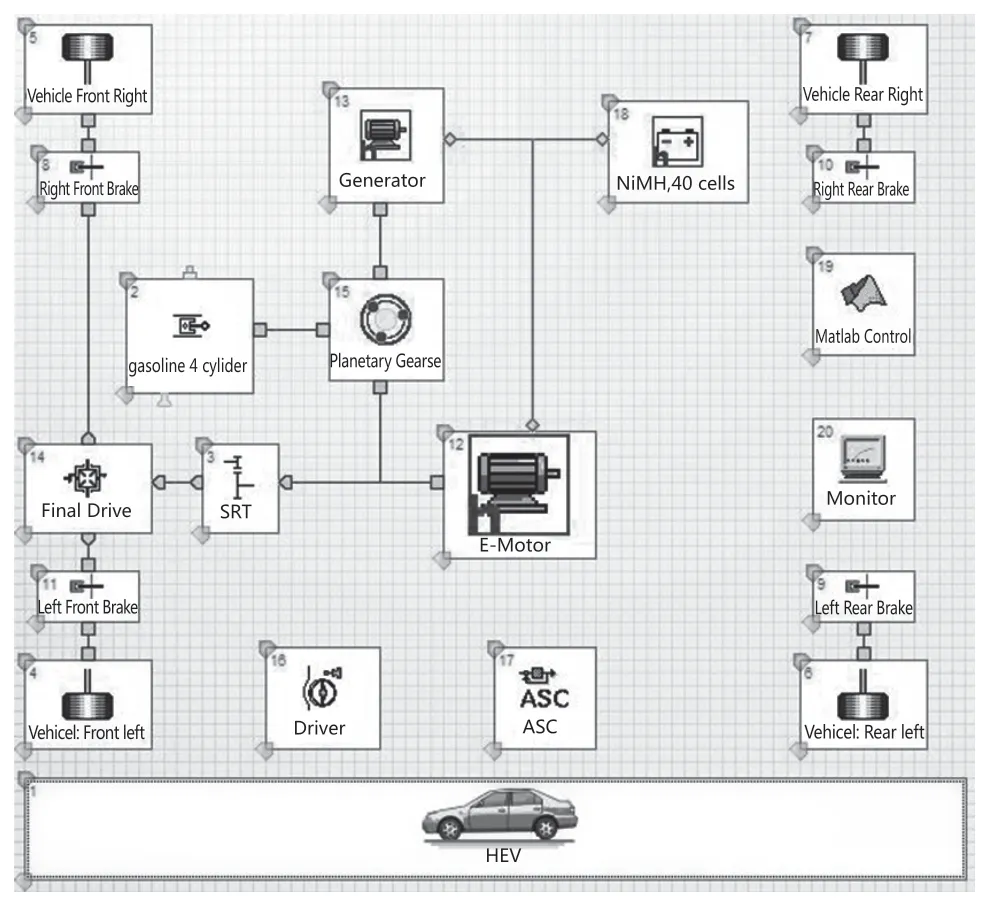
图2 整车模型Fig.2 Vehicle model
1.4 构建控制策略
通过Simulink 软件的模块化编程,构建了基于逻辑门限值控制策略。对发动机,电机和制动器之间的转矩分配,将HEV 的工作状态划分为:纯电动、发动机电机混合驱动、再生制动、机械制动、部分再生制动以及停车充电等。控制策略顶层结构包括三大板块:转矩计算、模式识别、转矩分配。各板块的输入输出信号如图3 所示。

图3 控制策略顶层结构Fig.3 Top-level structure of control strategy
上述控制策略三大板块中,转矩计算板块基于汽车行驶阻力方程,根据输入路谱的当前车速和下一时刻目标车速计算需求转矩;模式选择板块基于转矩计算板块输出的需求转矩和电池当前的SOC值进行模式划分。其中,T_hi 和T_low 分别由发动机高效率区间上下限a_hi 和a_low 乘以当前发动机转速下的最大转矩得到的高效率转矩上下限值,a_hi 和a_low 分别取0.7,0.3;SOC_high 和SOC_low分别为SOC值的上下限值,取值为80%,30%;模式识别板块输出对应的模式编号给转矩分配模块,将总转矩分为发动机转矩、电机1 转矩、电机2 转矩以及制动转矩4 部分。
2 联合仿真及结果分析
2.1 NEDC 循环工况仿真分析
为验证HEV 整车模型和该控制策略的有效性,基于新欧洲标准循环工况NEDC 数据[6],进行循环工况仿真计算。该工况持续时间为1 180 s,车速最高可达120 km/h。图4(a)所示,实线为当前车速,虚线为下一时刻目标车速,2 条曲线重合度较高,说明该模型的车辆跟随性较好;从图4(b)可以看出,2 个电机不断切换工作状态,适应不同的工况;图4(c)是发动机、电机的输出扭矩变化;图4(d)是电池电量变化情况,结合NEDC循环工况的车速变化可知,循环开始时电池电量为50%,目标车速较低,转矩需求低,电池电量基本维持不变,循环末期车速增大,转矩需求量增大,发动机的输出转矩明显提高。并且,为了满足加速需求,电池对外放电,SOC值小幅度下降。直到循环结束之前制动停车时,电机2 进行能量回收,补充了损失的SOC值。

图4 仿真计算结果Fig.4 Simulation results
由于构型为HEV,在讨论燃油消耗时需要将电量消耗转换为等量的燃油消耗,转换公式如式(9)所示。NEDC 循环工况下百公里油耗见表2。

表2 NEDC 工况百公里油耗Tab.2 Fuel consumption per 100 km under NEDC condition

式中:qequ——电量转化成的油耗;ΔSOC——电量末值与初值之差;C——电池容量;Hu——燃油热值,取42 700 kJ/kg;S——行驶总路程;ρ——燃油密度,取0.72 kg/L。
汽车尾气是大气污染的主要来源之一,含有大量的有害物质如NOX、CO 和HC 等气体。经过仿真计算得到了以下3 种主要污染物的单位路程排放量,具体数值如表3 所示。

表3 排放仿真结果Tab.3 Emission simulation results
2.2 动力性仿真分析
对汽车的原地起步加速时间和最大车速进行仿真计算,结果如图5 所示。在9.23 s 时汽车由0达到60 km/h 的速度,并且最高车速高于170 km/h,满足了整车的动力性要求。
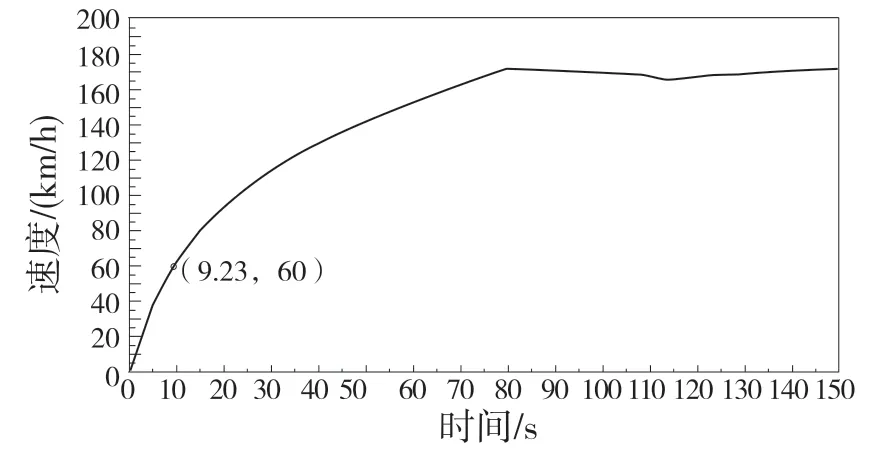
图5 加速性能仿真结果Fig.5 Simulation results of acceleration performance
3 结论
控制策略的搭建和动力部件选型是单行星排式混合动力汽车研究的重难点。本文通过选择验证合适的元件参数,搭建了单行星排混合动力整车模型,并构建了逻辑门限值控制策略进行联合仿真。分析采用本控制策略的HEV 各部件的运行特性及整车经济性、动力性和排放性,证明各动力部件能够稳定运行,发动机运行在高效率区间,电池的SOC值保持在较稳定的水平。此混合动力汽车模型及控制策略达到了设计目标性能,可以进一步进行智能控制策略优化研究和整车实验验证。
