跑道不平整激励下飞机滑跑动载分析
2022-10-27钱劲松潘祥伟岑业波刘东亮
钱劲松, 潘祥伟, 岑业波, 刘东亮
(1.同济大学 道路与交通工程教育部重点实验室,上海 201804; 2.同济大学 民航飞行区设施耐久与运行安全重点实验室,上海 201804)
道面不平整激励下飞机滑跑时会对跑道产生附加的动荷载,这一方面会加大飞机构件中的应力,引起构件的疲劳损伤和局部破坏;另一方面会增大道面和道基结构的附加应力与动态变形,加剧道面平整度的恶化,进一步增大飞机对跑道的动载效应,形成恶性循环。因此,深入研究飞机滑跑动荷载与道面平整度的关系对飞机安全运行,跑道养护和维修具有重要意义。
早期,研究人员采用现场试验实测飞机对跑道的动荷载。Ledbetter[1]在B727上安装测量设备获得了飞机从低速到高速滑跑、转弯、起飞和着陆等不同工况下的动载数据。许金余等[2]实测了军用飞机着陆撞击、滑跑、试车振动时的垂直动荷载。虽然现场试验能够得到飞机对跑道动荷载的真实测量数据,但是建设成本和试验费用极高,同时由于安全限制,无法设置极端情形的工况。因此,研究人员逐渐将研究方法转向飞机地面运动模型和数值仿真分析。董倩等[3]采用飞机主起落架四自由度模型,获得了飞机在不同平整度道面上的滑跑动载。程国勇等[4]建立六自由度整机模型,利用Simulink求解道面不平整激励下的飞机振动响应。Liang等[5]根据GB 7031-86中的路面功率谱密度分级标准生成8个等级的随机道面,利用ADAMS仿真分析跑道平整度对飞机起落架荷载的影响。Du等[6-7]在Sun等[8-10]研究结果的基础上,根据飞机动力学理论和国际平整度指数(international roughness index,IRI)的计算模型,推导了考虑升力作用下飞机滑跑动载系数与道面IRI、滑跑速度之间的函数关系式。朱立国等[11]利用ADAMS/Aircraft建立了A320、A330和A380的虚拟样机模型,简化了Du等提出的飞机动载系数公式,并统计了回归参数与IRI的关系。

因此,本文利用虚拟样机技术,建立B737-800的虚拟样机模型,通过逆傅里叶变换法重构不同不平整指数C和频率指数w对应的不平整道面,利用ADAMS/Aircraft仿真软件获取不同滑跑速度、不同道面不平整激励下的飞机对跑道的动载响应,探究飞机滑跑动载系数的变化规律,揭示飞机滑跑动载系数与滑跑速度、道面不平整频谱参数之间的关系。
1 虚拟样机仿真
1.1 虚拟样机模型建立
本文以波音公司的B737-800机型为研究对象,建立虚拟样机模型[19-21]。首先构建机身,起落架,轮胎的三维几何模型,然后定义各个模型部件的质量属性、运动副、力元素等参数,生成相应的模板文件并建立起机身子系统,起落架子系统和机轮子系统。最后建立各子系统之间以及子系统与仿真试验台之间的通信器,将子系统组装成整机装配体(如图1所示)。
1.2 不平整道面时域重构
大量研究表明,道路或跑道不平整可看作频域内的零均值、局部均匀、各态历经的平稳随机过程,时域内的各态历经平稳随机过程,用功率谱密度表述其统计特性。在道路平整度评价的过程中,学者们提出了许多功率谱密度函数表达式,其中常用的为幂函数形式[22]
Gd(n)=Cn-w
(1)
式中:C为不平整指数, m3-w·cyclew-1;w为频率指数,无量纲。在双对数坐标系下,式(1)表征的功率谱密度函数图像为一条直线。C为直线在空间频率n=1 cycle·m-1时的纵坐标值,表征着道面不平整的整体水平。C值越大,功率谱密度越大,道面越不平整。w是功率谱密度直线的斜率,表征着道面不平整的波长组分。w越大,道面不平整中长波成分越显著。
美国联邦航空局(Federal Aviation Administration,FAA)收集并公开了37条跑道中线纵断面高程数据[23]。Qian等进一步利用车载式激光平整度仪和全球卫星导航系统采集了国内7条跑道的道面高程数据,得到C和w的分布情况,其中实测机场跑道的功率谱密度参数C的分布范围为0~0.8,集中分布在0~0.4;参数w的分布范围为1.8~3.0,集中分布在2.0~2.6。
为研究飞机在不同功率谱密度参数对应的不平整道面上滑跑时的动载特征,对不平整指数C取0.1、0.2~0.8(间隔为0.2)和频率指数w取1.8~3.0(间隔为0.2)进行组合,得到一系列表征不同道面平整度的功率谱密度函数。基于功率谱密度重构虚拟道面的方法有谐波叠加法[24-26]、逆傅里叶变换法、滤波白噪声法[27-28]和时间序列模型法,本文选用逆傅里叶变换法。考虑到平整度的定义为波长大于0.5 m的不平整[29],并且飞机高速滑跑下的敏感波长可达到120 m,因此选取波长范围为0.5~120 m的道面功率谱密度,通过逆傅里叶变换法重构得到不同平整度的道面。综合考虑仿真的效率和精度,高程点间距取为0.25 m,跑道长度取为1 500 m,重构的道面如图2所示。由图2可以看出,随着不平整指数C和频率指数w的增大,重构的虚拟道面的平整度都变差。
1.3 滑跑仿真分析
飞机起飞过程可分为起飞滑跑、抬轮离地和爬升三个阶段(如图3所示)。在起飞滑跑阶段,飞机在发动机推力作用下不断加速,到达抬前轮速度后,飞机抬起前轮,增大迎角,放下增升装置,提高升力。考虑到飞机抬前轮后升力系数发生改变,且抬前轮速度接近离地速度,在升力的作用下,此时飞机对跑道的动荷载较小。因此本文研究起飞滑跑到抬前轮之前这一阶段飞机的滑跑动载响应。
将重构的不平整道面作为激励输入,在ADAMS/Aircraft中进行滑跑仿真分析,得到B737-800以不同速度在不同不平整道面上匀速滑跑时的动载响应。B737-800的离地速度约为260 km/h,当滑跑速度接近飞机离地速度时,飞机的振动会愈发剧烈,出现跳振,与道面脱离接触,影响仿真的准确性。因此选取滑跑仿真分析的速度为40~200 km/h,间隔为40 km/h,兼顾低速和高速滑跑的情况。图4为B737-800在功率谱密度参数C=0.1,w=2.0的道面上以200 km/h的速度匀速滑跑时前起落架和主起落架的动荷载。为了避免仿真开始时数据的剧烈波动,在道面文件中的不平整跑道前设有270 m长高程为0的过渡段,仿真的平衡时间为2 s,因此在仿真的前2~7 s数据与之后的数据存在差异,后续分析舍去该段。
2 仿真结果与讨论
2.1 前起落架和主起落架动载系数对比
以道面平整度良好(C=0.1,w=1.8)和平整度较差(C=0.8,w=3.0)的情况为例,飞机在跑道上以不同速度滑跑时前起落架和主起落架的动载系数(dynamic load coefficient,DLC)如图5所示。假设飞机滑跑动载为正态分布,则动载水平不超过动载均值加3倍标准差的概率为99.87%,因此取动载均值加3倍标准差作为最大动载。通过图5对比可以发现前起落架和主起落架的动载系数均值基本一致,且都随着速度增大而减小,但前起落架动载系数的变异性即标准差更大,使得前起落架最大动载系数可达主起落架最大动载系数的1.05~1.85倍。当飞机以200 km/h速度滑跑时,随着功率谱密度参数从C=0.1,w=1.8增大到C=0.8,w=3.0,主起落架最大动载系数增大了2.13倍,而前起落架最大动载系数增大了3.60倍,说明道面不平整对前起落架的影响更大,与Chen等[30]采用APRas软件获得的结论一致。这是因为飞机前起落架远离飞机重心,而主起落架更接近飞机重心,使得飞机滑跑过程中位于飞机前部的前起落架振动更加剧烈。此外,在图5(b)中可以观察到前起落架动载系数减去3倍标准差后出现负值的现象,这是由于飞机在滑跑仿真过程中发生了“跳振”现象。
虽然前起落架最大动载系数能达主起落架最大动载系数的1.85倍,但是B737-800的主起落架质量分配系数为93.6%[31],计算可得主起落架的最大动载至少为前起落架的3.95倍,本文旨在研究飞机在不平整跑道上滑跑时的动载特征进而指导跑道的管理和养护,因此选取对跑道动载水平更大的主起落架作为分析对象。
2.2 主起落架动载系数影响因素分析
2.2.1 功率谱密度参数对动载系数影响
图6和图7分别为主起落架动载系数随不平整指数C和频率指数w变化的情况。从图6和图7可以看出,当飞机以一定速度滑跑时,随着道面功率谱密度参数C和w的增大,道面不平整加剧,主起落架的动载系数均值变化不大,而动载系数的变异性和最大动载系数增大。当w=3.0,v=200 km/h时,不平整指数C从0.1增大到0.8,最大动载系数增大了1.61倍。而当C=0.8,v=200 km/h时,频率指数w从1.8增大到3.0,最大动载系数增大了1.97倍。这说明C和w的增大,均会增大飞机起落架动载系数的变异性,使得最大动载系数增大。而现有研究[32]在分析跑道不平整对飞机滑跑动载的影响时,多将w取固定值2.0,低估了w对飞机滑跑动载的影响。
为进一步探究不平整指数C和频率指数w对最大动载系数的影响,绘制不同速度下最大动载系数分别随C和w变化的情况如图8和图9所示。从图8和图9可以看出,随着C的增大,最大动载系数的增长速率逐步放缓。而随着w的增大,最大动载系数的增长速率越来越大。在高速下最大动载系数随w的增大较低速时更明显,这是因为w表征道面不平整的波长组分情况,w越大,道面不平整中长波成分越显著,而飞机高速滑跑下对长波更敏感,因此高速下w对飞机滑跑动载的影响较低速时更明显。
2.2.2 滑跑速度对动载系数影响
当飞机速度为0时,可视为静载作用,动载系数均值和最大动载系数都为1。图10为飞机以不同速度滑跑时的动载系数均值。由图10可知,随着飞机滑跑速度的增大,飞机升力逐渐增加,主起落架动载系数均值逐渐减小。考虑到飞机升力与滑跑速度的二次方成正比,利用速度的二次方对各个速度下的动载系数均值进行拟合,得到的二次回归方程相关系数很高(R2=0.999 8)。结合2.2.1节可知,飞机滑跑过程中动载系数的均值与道面不平整水平无关,仅由飞机滑跑速度决定。
图11为各种道面平整度状况下飞机滑跑过程中主起落架动载系数随滑跑速度的变化图。从图11可以看出,动载系数的变异性随滑跑速度增加而增大。在w较小,动载系数变异性随滑跑速度的增长不明显,如图11(a)~图11(c);而当w较大时,随着滑跑速度的增大,动载系数的变异性明显增大,如图11(d)~图11(f)。这表明当道面不平整中长波成分更显著时,随着速度增加动载系数变异性增大,与飞机高速滑跑时对长波更敏感的特性相吻合。
2.2.3 道面不平整和滑跑速度对动载系数的耦合影响
在跑道平整度状况较好时如图11(a)所示,飞机滑跑速度从40 km/h增加到200 km/h,主起落架最大动载系数一直下降,考虑到飞机速度为0时最大动载系数为1,而40 km/h时最大动载系数1.026>1,这说明在0~40 km/h速度范围内,最大动载系数存在上升段,因此0~40 km/h的速度范围内会出现最大动载系数的极值和对应的滑跑速度,称其为敏感速度。随着跑道平整度的恶化,敏感速度不断增大,如图11(b)~图11(d)中最大动载系数的极值出现在80 km/h,图11(e)中最大动载系数的极值出现在160 km/h,而图11(f)中最大动载系数随滑跑速度增大而一直增大,未出现极值,说明此时敏感速度已大于200 km/h。
飞机在滑跑过程中,同时受到道面不平整激励和升力的作用(见图3),其中道面不平整会增大飞机滑跑动载系数的变异性,使得最大动载系数增大;而升力则会减小飞机滑跑动载系数的均值,使得最大动载系数减小。飞机滑跑速度较低时,机翼提供的升力较小,道面不平整的作用更显著,最大动载系数处于上升阶段;随着滑跑速度的不断增加,飞机受到的升力大幅提升,其对动载的减小效应超过不平整激励对动载的增大效应后,最大动载系数开始减小,因此在两者的综合作用下最大动载系数会出现先上升后下降的现象。在跑道平整度较好时,道面不平整对动载的影响较小,此时敏感速度也较小。而随着道面不平整的加剧,不平整激励对飞机振动的影响越来越强烈,使得敏感速度不断增大(见图12)。
3 最大动载系数预估模型
根据D’Alembert原理可列出飞机滑跑过程中的运动方程
N+FL-mg=maZ
(2)
式中:N为地面对飞机的支撑力;m为飞机质量;aZ为飞机竖向加速度;g为重力加速度,为9.8 m/s2;FL为飞机所受升力,升力计算公式为
(3)
式中:ρ为空气密度;v为飞机滑跑速度;CL为起飞滑跑阶段的升力系数;S为机翼面积。
将式(1)表示的道面空间域功率谱密度转化为时域功率谱密度
(4)
式中,f为时间频率,f=nv。
跑道不平整输入的功率谱密度与飞机竖向振动位移输出的功率谱密度之间存在如下关系
(5)
则飞机振动加速度功率谱
GA(f)=(2πf)4GZ(ω)=
(2πf)4|HHZ(jf)|2Gd(f)=
|HHA(jf)|2Gd(f)=
|HHA(jf)|2Cvw-1f-w
(6)
式中:GZ(f)和GA(f)分为飞机竖向振动位移和加速度的功率谱密度;HHZ(jf)和HHA(jf)分别为道面不平整输入和飞机竖向振动位移输出及加速度输出之间的频率响应函数。
由于道面不平整为零均值的随机过程,则道面不平整激励下的飞机竖向加速度也为零均值的随机过程,那么飞机竖向加速度的方差为

Cvw-1f(w)
(7)
其中,
(8)
f(w)=aebw
(9)
并通过数据拟合得到参数a,b的值。本文对仿真获得的不同滑跑速度下飞机重心处的加速度利用式(9)进行拟合,拟合结果如图13所示,相关系数R2=0.736 6,说明该模型能较好拟合函数f(w)。
飞机动载系数为
(10)
从式(10)可以看出,飞机滑跑动载可以分为三部分:一是飞机自质量静载;二是跑道不平整导致飞机振动而引起的动载增大;三是飞机升力引起的动载减小。当飞机以一定速度在跑道上匀速滑跑时,飞机自质量和升力作用引起的动载系数为定值,动载系数的变化完全由加速度的变化所引起,此时动载系数的标准差为
(11)
则飞机最大动载系数为
(12)
式中:μDLC为动载系数均值;σDLC为动载系数标准差。
由于飞机质量主要分配到飞机的主起落架,因此采用主起落架动载系数近似代替飞机整机的动载系数,对ADAMS/Aircraft仿真获得的飞机主起落架动载系数进行非线性拟合,拟合结果如表1所示。拟合系数和拟合模型的p值均很小,说明该模型能很好地拟合飞机的动载系数且待定系数a,b的拟合结果很好。
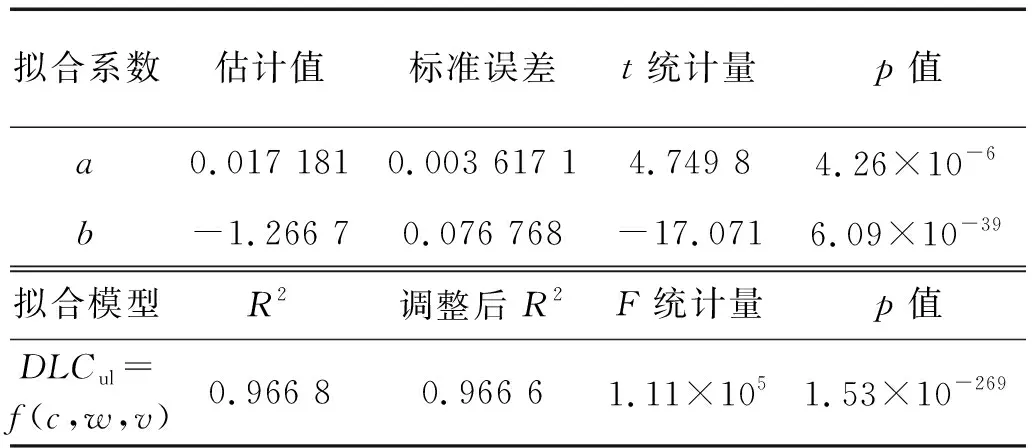
表1 拟合结果
所以,不同滑跑速度、不同道面不平整激励下的B737-800机型的最大动载系数为

4.697 5×10-6v2
(13)
式中,v为速度,km/h。值得注意的是:式(13)适用于B737-800起飞滑跑到飞机抬前轮前这一阶段的最大动载系数预估。利用式(13)预估不同速度、不同道面平整度下的最大动载系数如图14所示。可见,各个速度下最大动载系数预估模型与ADAMS/Aircraft仿真结果的拟合相关性均很高,R2>0.93,飞机高速滑跑时的拟合相关性略高于低速时。
随后,令式(13)中DLCul关于v的偏导数为0可得敏感速度vm与功率谱密度参数C,w的函数关系式如式(14),绘制不同C,w对应的道面不平整激励下B737-800滑跑时的敏感速度和相应的最大动载系数极值,如图15所示。
(14)
从图15(a)可以看出,随着不平整指数C和频率指数w的增大,敏感速度vm也增大,验证了2.2.3节中的结论。当w很小时,敏感速度随C的增长较慢;随着w的增大,敏感速度随C的增长速率不断增大。而w对敏感速度的影响显著,C较小时,敏感速度随w的增长已经非常明显。以平整度为A级(C=0.16×10-6m1.0·cycle1.0,w=2.0)的跑道为例,B737-800滑跑敏感速度为38.4 km/h,最大动载系数为1.021 1。当w从2.0增大到2.2,敏感速度变为51.8 km/h,增大了34.9%,而最大动载系数变为1.030 0,增大了0.9%。对比可见w对敏感速度的影响较其对最大动载系数的影响更显著。
对于功率谱密度参数范围在C=0~0.8,w=1.8~3.0内的不平整跑道而言,最大动载系数可达2.048 3。考虑到B737-800机型的离地速度约为260 km/h,而实测机场跑道功率谱密度参数C集中分布在0~0.4,w集中分布在2.0~2.6,根据式(14)可得此时敏感速度最大为150.4 km/h,因此可认为对于大部分实测机场跑道,B737-800机型在滑跑过程中都存在敏感速度,会达到最大动载系数的极值,极值最大可达1.163 6。
4 结 论
本文在ADAMS/Aircraft中建立了B737-800的虚拟样机模型,根据逆傅里叶变换法利用功率谱密度重构了一系列不平整道面,进行多工况滑跑仿真获得了飞机以不同速度在不同功率谱密度参数对应的不平整道面上滑跑时的动载响应。得到的主要结论如下:
(1)不平整指数C和频率指数w的增大均会引起飞机滑跑过程中的最大动载系数增大。最大动载系数随C的增长速率逐步减小,而随w的增长速率呈现逐步增大的趋势。高速下最大动载系数随w的增长较低速时更明显。
(2)随着滑跑速度增加,飞机升力增大,动载系数均值减小,而动载系数的变异性增大。在w较大时,动载系数变异性随滑跑速度增长更明显。
(3)在跑道不平整和飞机升力的综合作用下,最大动载系数随滑跑速度增加先增大后减小,存在极值和相应的敏感速度。敏感速度随C和w的增大而增大,其中w对敏感速度的影响更显著。
(4)推导得到的最大动载系数预估方程与仿真结果的相关性很好(R2>0.93),基于预估模型可知实测跑道不平整频谱参数集中分布的范围(C=0~0.4,w=2.0~2.6)内,B737-800机型滑跑时敏感速度最高为150.4 km/h,最大动载系数可达1.164。
本文探究了道面不平整激励下的飞机滑跑动载响应,但未考虑飞机-跑道耦合系统中跑道结构变形对飞机滑跑动载的影响,需要在今后的研究工作中进一步完善。
