基于改进滑模趋近律的振动基机械臂的有限时间轨迹跟踪控制
2022-10-27郭宇飞许盛悦李慧子王志刚郝志强
郭宇飞, 许盛悦, 李慧子, 王志刚, 郝志强
(1. 武汉科技大学 冶金装备及其控制教育部重点实验室,武汉 430081;2. 武汉科技大学 精密制造研究院,武汉 430081;3. 武汉科技大学 机器人与智能系统研究院,武汉 430081; 4. 中国舰船研究设计中心,武汉 430064)
随着机器人技术的不断地发展,机械臂的应用越来越多样化,人们对其性能寄寓了更高的期望。振动基机械臂[1]是一类安装基座存在随机振动的机械系统的总称,包括:太空自由漂浮机械臂[2]、水下作业机械臂[3]、水面起重机[4]、坦克弹药传输机械臂[5]等。受基座振动带来的非线性耦合力的影响,振动基机械臂的控制一直都是相关领域的研究的热点和难点。“如何抑制基座振动的影响,实现机械臂系统的精确位置和轨迹跟踪控制”,吸引了许多学者的关注。
根据机械臂的任务空间的不同,振动基机械臂通常可以分为以下两类:一类是全局坐标振动基机械臂,机械臂工作在全局笛卡尔坐标系下,例如太空自由漂浮空间机械臂、水下作业机械臂、水面起重机等;另一类是随动坐标振动基机械臂,机械臂工作在基座的随动坐标系下,如坦克弹药传输机械臂等。
对于第一类振动基机械臂,现有控制策略大多基于基座振动可测或可预估的前提,然后进行系统的解耦和补偿控制。如Toda等[6]将海浪扰动假设在已知频率范围内,简化了振动基系统并提出了一种基于线性H∞的控制方法,实现了振动基系统的鲁棒轨迹跟踪控制。Küchler等[7]将海上起重机非线性模型的输入、输出线性化,并结合卡尔曼滤波方法对波浪运动进行预测,实现了起重机的升降鲁棒控制。Chu等[8]为解决船体垂直垂荡运动对海上起重机运输的影响,提出用神经网络的船舶运动预测方法对系统进行主动补偿。对于第二类振动基机械臂系统,基座振动产生的非线性耦合力(如离心力、科氏力等)更加复杂,其控制器的设计也更具挑战。坦克弹药传输机械臂是这类系统的典型代表。如图1所示,坦克车体(基座)在受到来自火炮后坐力和不平路面的共同激励,对传输机械臂系统产生难以测量和预估的基座振动,因此对控制器的鲁棒性要求较高。
对坦克弹药传输机械臂的前期研究中,基于隐式Lyapunov方法的连续型反馈控制方法[9]和基于分段线性反馈控制算法[10],已被证明够克服车体振动的干扰,具有良好的鲁棒性。但是上述方法并未考虑控制器的有限时间性能。有限时间控制是一些振动基机械臂在实际中面临的另一个难点,如何实现坦克弹药传输机械臂的快准装填面临着巨大挑战。
滑模控制,因为其对系统模型依赖性较小,在系统受到外界干扰和参数摄动时具有不变性,是一种鲁棒性、抗干扰性强的非线性控制方法,已被广泛应用在振动基机械臂的控制器设计中。Kim等[11]将四旋翼无人机和机械臂作为一个组合系统建立动力学模型,设计一种自适应滑模控制器并完成无人机机械臂的拾取控制;Ngo等[12]考虑到海浪等因素对水面起重机产生影响,设计一种新的滑模面并结合电车动力学、船舶动力学与摇摆动力学提出滑模控制方法很好的消除了系统的横向摇摆干扰;Iwamura等[13]通过引入一个非线性滑模面来实现对振动基机械臂的变增益积分控制。
滑模控制本质上是一种变结构控制方法,系统状态在达滑模切换面附近时系统惯性必然存在,这也使得在实际中滑模控制系统的抖振必然存在[14]。为了改善滑模控制抖振问题,高为炳院士[15]首先将趋近律运用在滑模控制中,并提出了等速趋近律、指数趋近律、幂次趋近律和一般趋近律。
通过趋近律的设计,除了可以抑制抖振还能调节到达滑模面的速率,进而实现快速控制。廖瑛等[16]提出一种双幂次的组合趋近律,并利用fal函数的性质加快了趋近速率。王要强等[17]在传统幂次趋近律的基础上,加入指数项并且在幂次项指数中引入系统状态变量,使系统能平稳进入滑模面并解决了幂次趋近律远离滑模面趋近速度慢的缺点。郑美茹等[18]利用分数阶次积分型符号函数特性,有效解决滑模控制中趋近速度和抖振程度间的矛盾,但控制器设计复杂实现不易。Pan等[19]将幂次趋近律与等速趋近律相结合提出改进的趋近律,来实现变结构控制的全局快速收敛性,但是抖振问题仍然间断性而存在。
本文以坦克弹药传输机械臂为背景,针对一类基座振动未知的随动坐标系振动基机械臂,设计了一种快速的轨迹跟踪控制器。具体上,提出一种新型的对数幂次趋近律,然后结合快速终端滑模面提出一种新型的有限时间滑模控制算法,最后基于双环控制策略在Labview环境下搭建了系统的控制回路。试验结果证明了所设计控制器的有效性。
1 系统动力学分析
对于图1所示的传输机械臂系统,将来自车体的强烈扰动视为系统的外部干扰,采用拉格朗日法将其动力学模型由二阶非线性微分方程表示为
(1)
性质1惯量矩阵H(θ)为正定对称矩阵,且上下有界,即对任意向量λ有
mλ2≤‖λTHλ‖≤Mλ2
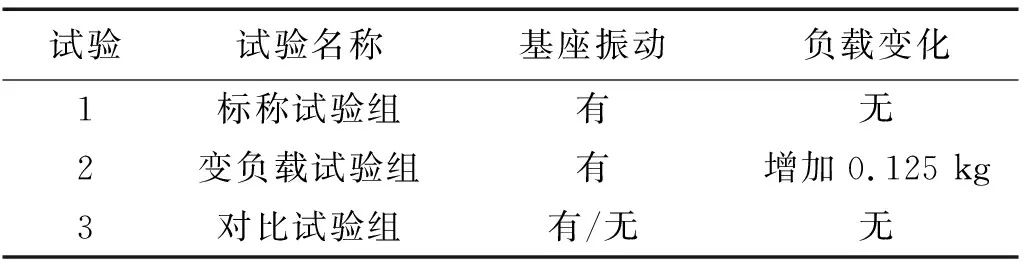
式中, 0 性质2系统的惯量矩阵H(θ),其偏微分大小具有有界性,即‖∂H(θ)/∂θi‖≤N(N>0)。 性质3存在常数S0>0,使得系统的基座扰动力项S满足‖S‖≤S0。 在滑模变结构控制中,将系统的滑模运动分为两个过程:趋近运动和滑模运动。趋近运动是指系统在轨迹跟踪的过程中从任意系统状态到滑模面的运动。为了提高趋近运动的性能,许多学者将改进的指数[20]、幂次[21]函数以及其他非线性函数[22]应用在趋近律函数中,但是目前对数函数在趋近律的研究中却极少。本文将对数函数引入趋近律中,提出了一种新的对数幂次趋近函数,趋近律方程为 (2) 式中: 0<α<1;ν为正偶数;K1,K2,K3>0。 由式(2)可知对数幂次趋近律函数由三项组成,式中第一项在滑模状态远离滑模面时起主导作用,后二项在滑模状态趋近于滑模面时起主导作用。通过合理的选择参数可以提高系统趋近运动的速度并抑制滑模抖振。 为了与不同趋近律函数的比较,将式(2)与下列三种常见的趋近律方程列举出来,代数式中选择相同的系数常数并画出方程曲线。 (1) 指数趋近律 (3) (2) 快速幂次趋近律[23] (4) (3) 双幂次趋近律[24] (5) 式中:K1=K2=K3=5;α=0.5,β=1.5,ν=4。 在图2中,横坐标表示滑模趋近运动的滑模状态,纵坐标表示趋近运动中的趋近速率。从图2中四种趋近律函数的比较可以看出,当滑模状态在σ=0(滑动模态区)附近时,对数幂次趋近函数的值小于其他三种趋近函数,减小了滑模状态在滑模面上切换时的速率,从而减小系统惯性,使滑模状态较平滑的进入滑模面来减弱抖振现象;当滑模状态远离σ=0附近时,对数幂次趋近函数值大于其他三种趋近律函数,滑模状态可以更快的趋向滑动模态区。综上述,合理选择对数幂次趋近律参数可以使系统提高收敛速度并在滑模态附近有效的缓解系统抖振。 接下来将为对数幂次趋近律的有限时间特性进行验证。 引理1针对非线性系统,若存在定义在包含原点邻域U⊂Rn内的连续可微的正定函数V(x),满足 (6) 定理1式(2)将在有限时间内收敛至平衡点领域内,有限时间为Tq。 证明:选择Lyapunov函数为 V(σ)=σ2/2 (7) 将式(2)代入求导后的式(7)得 (8) 由引理1可知c=K32^(3+α/4),κ=(3+α)/4, 式(2)将在有限时间内收敛于平衡点领域,有限时间Tq为 (9) 滑模变结构控制中,滑模运动目的是让系统的轨迹状态到达滑模面后能够渐近趋于原点收敛。传统的终端滑模面在接近原点时具有快速收敛能力,但是在远离原点时,收敛速度低于线性滑模面。快速终端滑引入线性项,解决了这一问题。考虑振动基机械臂在外界干扰下系统状态的不确定性强,选择传统滑模面将为机械臂的轨迹控制带来了许多不可控的问题。所以,本文将采用一种快速终端滑模面,通过对滑模面的参数设计可确定滑模运动的收敛时间上界。滑模面设计如下 (10) 式中:θd为期望轨迹;μ,λ均大于0;l,m,p,r为正奇数且满足l>m,r>p。给出式(10)的有限时间收敛上界ts[25]。 (11) 结合定理1可知,滑模变结构控制中滑模运动过程和趋近运动过程均可完成有限时间内收敛,由此可知,基于式(2)和式(10)的滑模控制方法可以实现系统的有限时间全局收敛稳定,收敛时间上限为ta=tq+ts具体表达式为 (12) 为得到本文方法的控制项,将式(1)代入求导后的式(10)可得 (13) 使用鲁棒项Ur=ξtanh(σ)替代S,其中ξ>S0,将式(2)与式(13)结合,可得出振动基机械臂系统的控制项为 (14) 为了不失一般性,本文根据坦克弹药传输机械臂的工作特性搭建垂直振动基-二连杆机械臂试验台来验证控制方法的有效性。将试验台主体分为振动基座、连杆1、连杆2三个部分,在基座下加入垂直振动干扰如图3所示。 试验台所选的关节电机型号为瑞士Maxon514100,控制器为EPOS2数字控制器,通过USB与上位机交换数据。振动基座底部的振动机构可产生振幅为77.05 mm 频率为1.5 Hz的垂直正弦基座振动干扰。试验平台响应时间约3 s。试验台的动力学模型图如图4所示。 对应式(1)中动力学系统各个矩阵的具体表达式为 式中:连杆质量和长度分别为m2=m3=0.228 kg,L2=L3=0.21 m;电机关节质量md3=0.61 kg;关节的驱动转动惯量分别为Jd2=0.000 018 1 kg·m2,Jd3=0.000 019 04 kg·m2; 关节1和关节2的相对质心的转动惯量J2=J3=0.000 005 kg·m2。 为验证本文控制方法对基座振动干扰和负载变化的鲁棒性以及本文控制方法的优越性。设置三组试验,如表1所示。 表1 试验分组表Tab.1 Table of experiments 将试验1设置为标称试验组,分别与变负载试验组(试验2)和对比试验组(试验3)进行对照来验证所提出控制方法的有效性。设置试验时长为100 s。期望轨迹为 (sin 0.5t,0.5cos 0.5t,sin 0.5t,0.5cos 0.5t) 试验1:为了验证本文所设计的控制器对的有效性,针对振动基试验台进行轨迹跟踪控制,控制参数为K1=13,K2=15,K3=5,α=0.5,ν=2,μ=15,λ=5,l=p=3,ξ=5.5,m=1,r=5,试验曲线如图5~图7所示。 由图5~图7可知,本文所设计的控制器,在垂直振动的干扰下表现出良好的跟踪性能。由图5(a)可知,电机关节1在启动后用时0.883 s完成有效的位移轨迹跟踪控制。跟踪位移轨迹平稳,在轨迹波峰及波谷处有最大稳态误差约为0.035 rad;由图5(b)可知,电机关节2在平台响应时间内自转,控制启动后实际轨迹迅速趋向期望轨迹,用时2.79 s完成有效的跟踪控制,跟踪位移轨迹平稳,稳态误差约为0.02 rad;由图6可知,在保证机械臂的位置控制前提下,机械臂的速度也能很好的跟踪期望曲线。由图7中电流响应曲线可知,并未出现传统滑模控制中强烈的抖振现象。综上述,本文所提出的控制器在基座振动的干扰下对机械臂的位移的轨迹跟踪表现出了具有良好的控制性能,同时对速度也具有良好的跟随性,在控制过程中未出现强烈的抖振现象。 试验2:为了验证本文所提出的控制方法对系统有效载荷具的不确定性具有鲁棒性,将负载质量增加0.125 kg加载位置为位于末端连杆即连杆2的质心处,试验台和控制器的其他参数与试验1保持一致。 试验结果如图8~图10所示。试验响应的试验结果和预期情况一致,改变负载后,系统达到有效跟踪时间相比试验1有所变化,关节1有效跟踪所用的时间减少了0.383 s,但是关节2有效跟踪所用的时间增加0.495 s。除此之外,对于系统的稳态误差和跟踪表现基本没有异样,这表明了该控制方法对负载变化具有较好的鲁棒性。 试验3:为验证本文所提出的控制方法的优越性,对振动基机械臂系统进行了一组对比轨迹跟踪控制试验。保持试验台的其他参数不变,将传统的滑模轨迹跟踪控制器代替本文的改进滑模控制器,控制器方程为 (15) 式中:μ=3;K1=1;ξ=7。 由图11可见,在无基座振动干扰的条件下,关节1的位移轨迹跟踪基本能实现,但曲线在跟踪过程中具有小幅震荡现象;在加入基座振动后,关节1无法完成轨迹跟踪任务,位移跟踪曲线在35.62 s,48.78 s,88.43 s 处均出现脱离期望轨迹的现象。这可能与关节1电机与振动基座固定安装,受到的振动影响较直接有关;关节2的位移轨迹跟踪曲线在有、无基座振动的条件下,试验曲线相似,主要区别在于加入基座振动后位移曲线在趋近期望轨迹过程中有小幅波动。由图12和图13明显可见,传统滑模控制方法下,系统的速度响应和电流响应曲线震荡幅值较大。表明了传统滑模方法并不能克服基座振动干扰,并且具有明显的抖振现象。 综上所述,结合试验1、试验2可知,本文提出的控制器对于不确定的有效载荷具有较好的鲁棒性,结合试验1、试验3可知,本文所提出的改进滑模控制器相比于传统的滑模控制方法对于基座振动干扰具有更好的鲁棒性,且具有较好的控制响应速度和控制精度,并且可以有效地抑制滑模的抖振现象。 (1) 以坦克弹药传输机械臂为背景,研究在基座垂直振动以及有效载荷不确定的条件下机械臂的轨迹跟踪问题,建立了包含基础振动干扰项的拉格朗日动力学方程。 (2) 设计了一种新型对数幂次滑模趋近律并结合快速终端滑模面提出了改进型的滑模控制方法,并证明此滑模面和趋近律组合的控制器具有有限时间收敛的特性。 (3) 搭建简化试验台验证所提出的控制方法的鲁棒性和优越性。与传统的滑模控制方法相比,本文提出的方法对基座的垂直振动干扰的抑制能力较强,响应速度较快,控制精度较高。 (4) 本文控制器的设计方法不仅仅只适用受到强基座振动干扰的坦克弹药传输机械臂,对与其他受到弱基座振动干扰的系统比如移动车载机械臂、无人机机械臂等同样具有工程参考意义。2 控制器设计
2.1 趋近律的设计


2.2 改进滑模控制器设计
3 试验设计及验证
3.1 试验台介绍

3.2 试验验证

4 结 论
