面切割结合k-means聚类的测点自识别隧道监测方法
2022-10-27郑荣政吴勇生苏哿张浩杨承昆
郑荣政,吴勇生,苏哿,张浩,杨承昆
(1.中国铁路设计集团有限公司 土建工程设计研究院,天津 300308;2.湖南联智科技股份有限公司,湖南 长沙 410200)
1 概述
隧道施工期间,由于周围地质情况复杂且施工过程中岩土力学行为的不断变化等原因,会对隧道产生综合影响从而使隧道产生变形,因此,隧道监控量测是隧道施工安全控制的重要环节[1-3]。隧道变形是其内部力学行为变化的最直观外部反映之一[4],传统方法采用钢尺接触量测和全站仪非接触量测方式以及多功能激光断面仪等进行变形量测,钢尺量测受人为影响较大,具有明显的局限性且精度难以保证[5],目前国内外广泛使用的全站仪[6]、激光断面仪量测方法作业效率较低、工作量较大[7]。
Moser等[8]尝试在结构内部提供数百个应变和温度传感点,并提供有关隧道衬砌行为的全新信息,但成本高昂,无法普遍应用。也有学者使用摄影测量方法进行隧道变形监测[6],虽成本较低但精度难以保证,无法获得较为可靠的监测结果[9]。随着三维激光扫描技术的发展,尝试将该技术引入隧道监控量测工作中[10]。赵宁宁等[11-13]通过对获取的隧道点云数据进行切片处理从而对隧道收敛情况进行分析;杜黎明等[14-15]利用移动式三维激光扫描技术获取绝对坐标系下的隧道点云数据,从而直接根据坐标值提取断面,该断面提取方法较为简单,但移动式三维激光扫描精度较低,无法用于监控量测;孙泽会等[16-17]通过对隧道横断面点云进行椭圆拟合,利用拟合得到的椭圆参数进行断面长、短半轴形变分析;李勇兵等[18]通过对点云进行三角网化,将离散点云转化为点云三角网模型,再通过多期监测数据对比或与设计模型对比进行多断面监控量测;Menéndez-Díaz等[19]通过软件自动化或半自动化识别点云中关键区域的变形趋势进行隧道全面监测,该方法具有创新性但不符合我国现有技术规程。
以上三维激光扫描隧道监控量测方法均是将相邻两期断面点云进行对比分析,隧道监测点的变形轨迹并不确定,隧道内岩体常常发生偏压或整体沉降,此类方法设定的监控量测控制点在2次监控量测数据中已经不是真正意义上的相同参照物,其监控量测结果无法满足现有规范要求。可见,现有基于三维激光扫描断面的监控量测方法所设定的监测点与实际监测点有较大位差。吴超等[20]通过手动提取标靶点云后进行标靶中心坐标的自动识别,但需人工选取标靶点云所在位置,并不能实现完全自动化识别。
为解决上述问题,兼顾传统测量方法和三维激光扫描技术优点,以自制三维激光扫描标靶作为监测点进行监控量测,结合施工隧道特点切割隧道点云平面,获得平面标靶点云,并结合文献[20]中基于k-means聚类的平面标靶自识别方法,提出面切割结合k-means聚类的测点自识别隧道监控量测方法(简称结合量测法),并设计了全站仪与三维激光扫描仪2种仪器,同时进行隧道监控量测标靶识别的精度对比试验,验证结合量测法进行隧道监控量测的可行性。
2 基于平面切割和k-means聚类的监测标靶自识别
通过平面切割方法自动获取平面标靶点云,再通过k-means聚类方法自动识别平面标靶坐标,完成监测点平面标靶的自识别。
2.1 基于平面切割的平面标靶点云自动获取
根据三维激光扫描的特点,设计一种基于平面切割的平面标靶点云自动获取方法。为保证标靶点云数量和质量,扫描平面标靶时采用区域精扫模式,选取的扫描区域略大于标靶所在区域,隧道监测平面标靶扫描点云示意见图1。
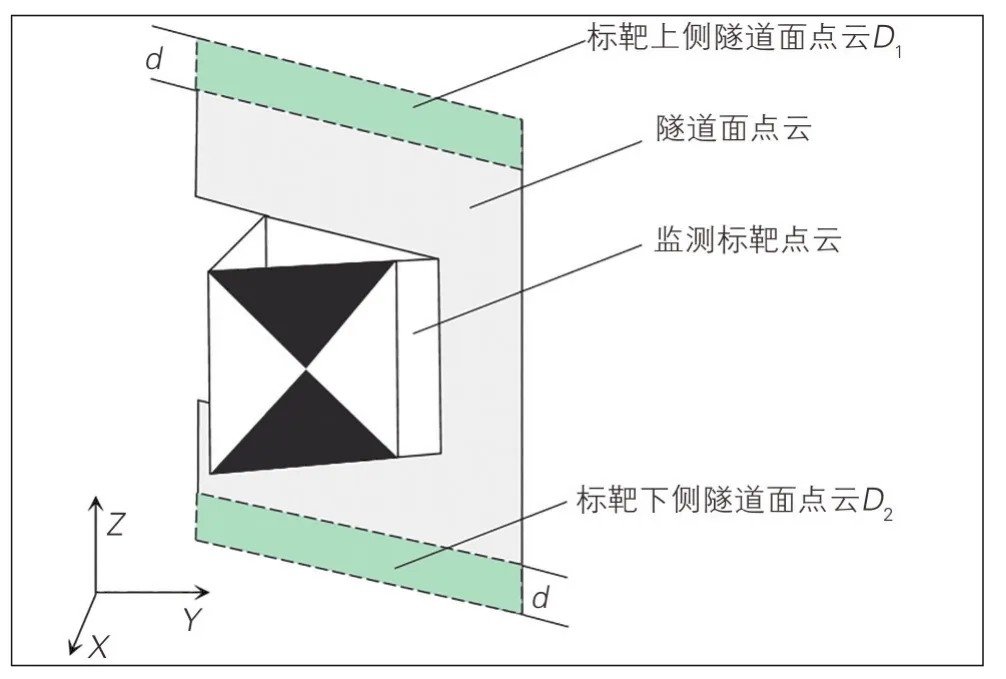
图1 隧道监测平面标靶扫描点云示意图
黑白标靶布设于隧道面上,标靶上、下侧分别有较多隧道面点云。设该区域点云高程最大值为Zmax、最小值为Zmin,标靶点云高程最大值为Zt-max、最小值为Zt-min,设距离阈值d(d<Zmax-Zt-max∧d<Zmin-Zt-min),分别取高程大于Zmax-d的点云D1和高程小于Zmin+d点云D2。同理当标靶位于拱顶时,获取水平方向的隧道面点云。
已知平面E:

式中:A、B、C、D分别为平面参数;x,y,z分别为平面内点坐标。根据文献[21]内平面拟合方法拟合得到[D1,D2]所在重心平面参数A、B、C、D。
设向量:k(A,B,C),k为常数系数,即垂直于E。令,d′为平面标靶正面图案距离隧道面的最短距离,从E开始,分别以平行于E法向量方向平移向量和-向量的平面E1和E2,得到E1与E2间的点云切割区域,其相应关系示意见图2。
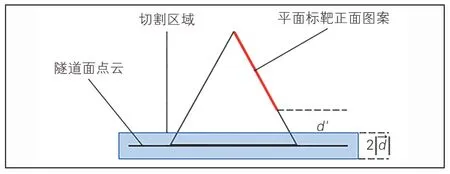
图2 切割平面与平面标靶几何关系示意图
如图2所示,蓝色框为点云切割区域,设点p(x,y,z)到平面E的距离绝对值为d,则:


2.2 基于反射强度和k-means聚类的标靶自识别
在获取平面标靶点云后,根据点云数据的反射强度值予以分级,使各区域点云数目相当,实现点云数据的区域分割;最后通过k-means聚类方法自动获取标靶中心坐标。
在对扫描数据分割为n个区域后,对每一区域的点云选取k个初始聚类中心进行k-means聚类,得到每一区域的k个聚类中心点si(s1,s2,s3,...,k),得到区域的中心点ˉ:

然后得到标靶中心点坐标pc:

3 监控量测对比试验设计及结果分析
3.1 对比试验设计
试验采用高精度全站仪与三维激光扫描仪进行对比,全站仪使用徕卡TS50高精度全站仪,仪器测角精度为0.5″,扫描仪使用Z+F IMAGER 5010X型扫描仪,线型误差为1 mm。采用一种自制三维激光扫描黑白格网监控标靶作为三维激光扫描仪和全站仪共同的测量标靶(见图3),该标靶中心点清晰可辨,表面平整光滑,当反射面平整光滑时,全站仪免棱镜测量精度较高,该标靶中心由全站仪免棱镜模式进行精确测量[22-23],同时该标靶的点云通过结合量测法自动识别出中心坐标。

图3 三维激光扫描仪与全站仪共用标靶
对比试验隧道内每个断面,共布设5个监控标靶,监控标靶位于拱顶和两侧拱腰位置(见图4),分3个断面分别布设,断面间距为10 m,断面预定里程分别为DK155+633、DK155+643、DK155+653。为方便表示,将3个断面的拱顶点分别表示为A2、B2、C2,收敛点表示为A1—A3、B1—B3、C1—C3。
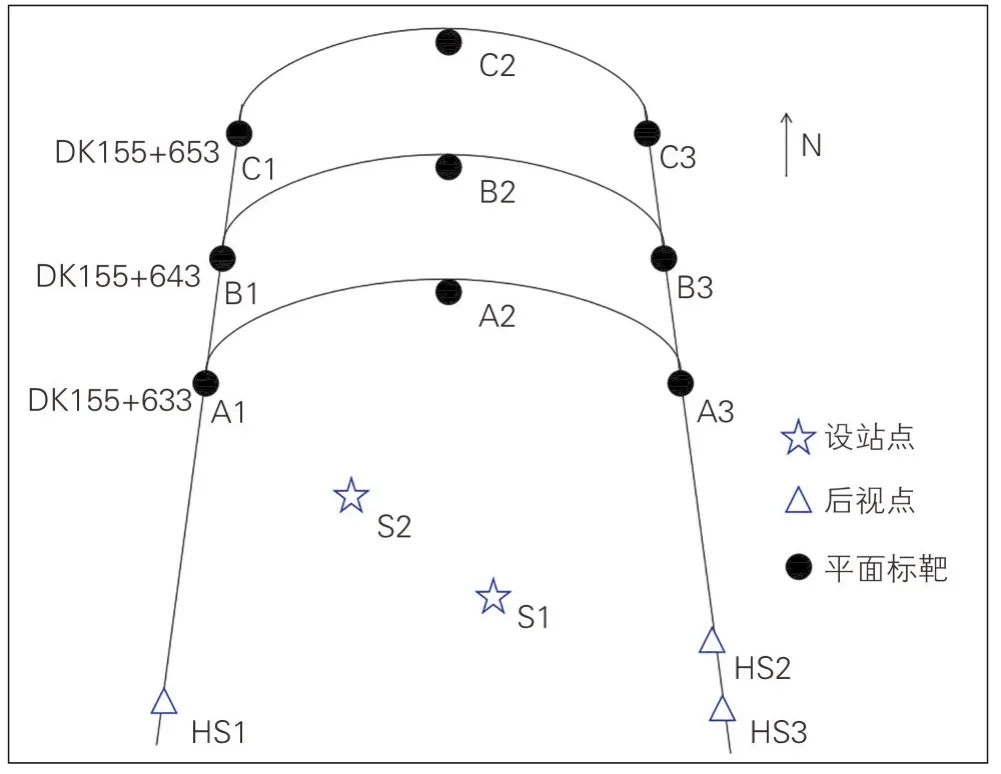
图4 标靶布设断面示意图
参考文献[24]优化现场仪器架设和标靶布设方案,并对其中3个标靶进行多次重复观测。
在现场监控量测数据获取完毕后,全站仪监控量测值由全站仪现场测量得到,扫描仪监控量测值分别由标靶自动识别和仪器自带点云处理软件识别方法进行识别得到。
设各次观测值为Lm(m为观测次数),观测值均值为,各观测值与均值的差值为m=lm-,因各观测值相互独立,观测值权阵P为对角单位阵,为所有的矩阵表示,则各观测值的内符合精度计算如下:

设全站仪坐标值为真值,则外符合精度计算如下:

3.2 试验结果分析
采用结合量测法进行标靶中心坐标提取,并将坐标识别点标注在三维图像上,标靶中心识别见图5(图中红色十字)。

图5 结合量测法标靶中心坐标提取
以全站仪测量数据为真值,由式(6)、式(7)计算得到内、外符合精度及其均值和标准差(见表1、表2)。
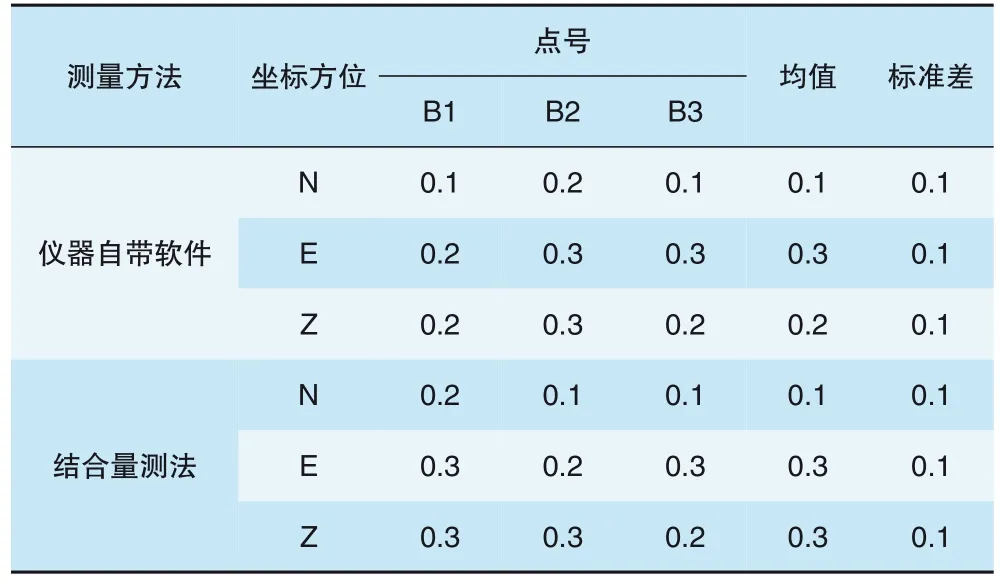
表1 内符合精度 mm
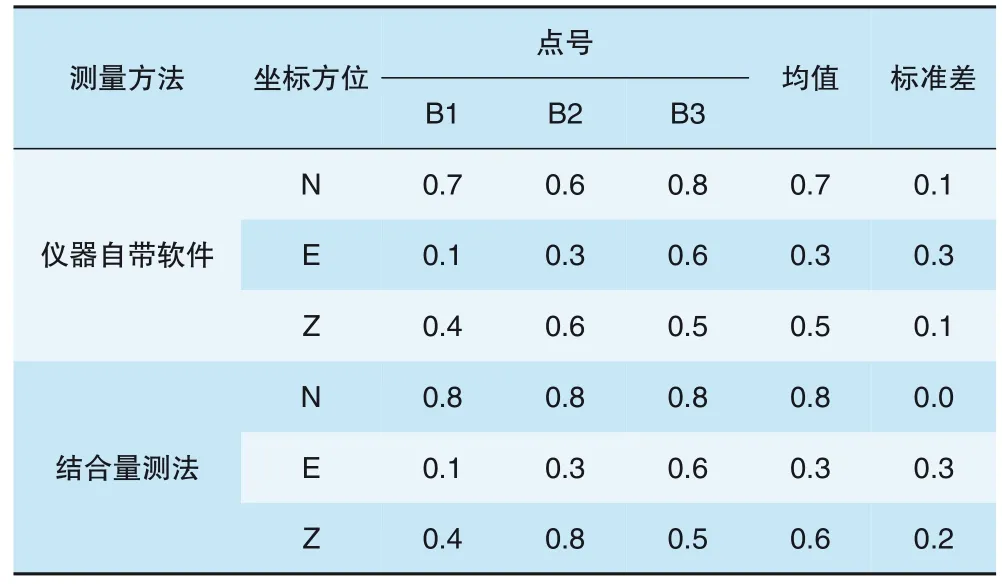
表2 外符合精度 mm
由表1、表2可知,仪器自带软件测量与结合量测法测量相比,内符合精度均值均在0.5 mm以内,且标准差均为0.1 mm;外符合精度均值均在1.0 mm以内,标准差均小于0.5 mm;仪器自带软件测量与结合量测法两者的内、外符合精度差值约0.1 mm,精度相当。
2站监测点3种方法偏距测量差比较见图6。为方便比较,对图6数据求取均值和标准差(见表3)。
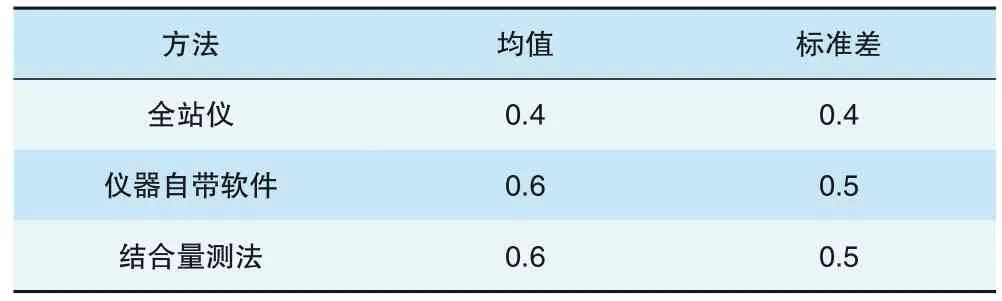
表3 2站监测点3种方法偏距测量差均值与标准差对比 mm
综上所述,结合量测法测量精度与高精度全站仪测量精度相似,坐标测量内、外符合精度满足铁路隧道监控量测要求的1 mm精度。且结合量测法自动化程度高,作业人员在环境复杂的施工隧道内无需繁杂、精细操作,仅需在仪器中框选标靶大致位置进行扫描即可得到标靶坐标,大幅减少外业工作人员工作量,降低施工隧道内操作仪器的人为误差可能性。
4 结论
根据监测对比分析得到如下结论:
(1)当使用自识别三维激光扫描标靶作为监控量测监控点时,结合量测法和仪器自带软件半自动识别监测精度相当,测量内符合精度均低于0.5 mm;
(2)根据隧道点云平面切割和k-means聚类方法,实现了三维激光扫描监测标靶中心坐标的自动识别,无需人为瞄准监测标靶中心进行测量,可进一步提升监测智能化水平;
(3)结合量测法测量外符合精度低于1.0 mm,满足铁路隧道监控量测要求的1 mm精度要求。
可见,使用隧道点云平面切割和k-means标靶自识别的隧道三维激光扫描自动监控量测方法,在保证与现有常规监控量测方法同等级监测精度的基础上提升了监测自动化、智能化水平。在后续研究中,将进一步探究影响三维激光扫描监控量测精度的因素,优化监测方法。
