改进TCPN变工况轴承故障诊断方法
2022-10-21胡春生李国利闫小鹏魏红星
胡春生,李国利,马 良,闫小鹏,魏红星
(宁夏大学机械工程学院,银川 750021)
滚动轴承是旋转机械传动装置最重要的部件之一[1],轴承的健康状态直接影响着旋转机械能否安全稳定地工作。由于轴承长时间高速旋转,常常伴随着磨损、高温等严苛的工作条件,因此故障频发[2]。轴承一旦发生故障,轻则停机整修,重则危及生命,给生产生活带来巨大隐患,因此实时监控轴承运转状态并对故障进行在线诊断具有重要意义。
当前轴承故障诊断方法主要分为两种,一种是以信号分析为主的传统故障诊断方式,如经验模态分解(EMD)[3]、集合经验模态分解(EEMD)[4]和奇异值分解(SVD)[5]等,这种方法依靠人工提取特征值,因此故障诊断效果过于依赖专家经验;另一种是以数据驱动为主的机器学习方法,如循环神经网络(RNN,包括LSTM 和GRU)[6-7],Logistic 回归[8]、支持向量机(SVM)[9],人工神经网络(ANN)[10]和卷积神经网络(CNN)[11]等,这种方法无需人工参与,可自动提取信号特征,且准确率大大提高,因此被广泛应用于故障诊断领域,但是在实际工程中,上述方法的准确率大幅度降低,究其原因,该研究均假设工况恒定不变,即训练集与测试集具有相同的分布。然而旋转机械在运行过程中,转速与负载等时刻发生变化,不同工况下数据分布存在差异,因此对变工况滚动轴承故障诊断的研究具有重大实际应用意义。
当转速和负荷都发生变化时,滚动轴承振动信号有以下四个特点:幅值变、脉动冲击间隔、采样相位不恒定和信号噪声污染[12]。因此,变工况轴承故障诊断的主要任务是找到不同工况间不变的特征。目前,针对变工况轴承的故障诊断主要分为两种,一种方法为对振动信号进行重采样,另一种方法通过优化神经网络结构,提取不同工况间的相同特征。
重采样方法将轴承振动信号这种复杂的非平稳信号根据不同转速进行阶次跟踪,重新采样为平稳信号。与按恒定时间间隔的采样方法不同,阶次跟踪是对振动信号按恒定角度间隔进行重采样,从而避免因转速的变化而导致采集的数据分布不同。文献[13]利用阶次跟踪算法对速度进行归一化,从而解决变转速问题。文献[14]基于阶次分析技术,对频谱峰比外(SPRO)、频谱峰比内(SPRⅠ)和峰比滚动元素(SPRR)三个频域特征进行修正,再将修正后的特征使用支持向量机分类。尽管阶次跟踪算法可以在一定程度上解决变转速问题,但是该方法的精度并不高,而且阶次跟踪往往需要专业的硬件或者复杂的软件,这种硬件十分昂贵,而依靠软件的阶次跟踪则十分依赖于插值,在某些工程中,速度信息更是无法获取,因此依靠重采样方法对变工况轴承故障进行诊断在实际工程中应用十分有限。
变工况轴承故障诊断的另一种方法为通过优化传统模型的网络结构来提取变工况振动信号中相同的特征。在卷积神经网络中,最大池化只取区域内神经元活性的最大值,而平均池化会分配相同的权重给区域内的神经元,因此会模糊重要特征。文献[15]提出一种新的数据池化方法。该方法用步长为2,激活函数为Rectified Linear Unit(ReLU)的小尺度卷积层代替传统的池化层,既可以使输出图像的尺寸变成输入的一半,实现降采样的功能,又能让小尺度卷积核在训练中自动调整权重挑选有效的特征。实验结果表明提出的方法可有效地提高神经元激活比例并增加神经元活性值的多样性。文献[16]基于Ⅰnception 模块思想,采用三个3×3 的小卷积层串联和堆叠来代替7×7 的大卷积核,从而学习更精确的特征。
以上方法通过优化池化层和卷积核来挖掘信号中的深层特征,但是这些方法仅挖掘信号的局部特征,未涉及故障样本的全局特征,而且容易受到噪声污染。为挖掘样本时间序列的全局特征,本文提出一种基于短时傅里叶变换的时域卷积池化神经网络(TCPN)故障诊断模型。首先,将不同负载下的轴承振动信号进行短时傅里叶变换,得到信号二维时频矩阵,将二维矩阵转化为一维时频序列,从而挖掘信号在时域及频域上的特征;其次,引入因果卷积和膨胀卷积,使模型在特征提取时可以获取输入层的完整历史信息,挖掘样本全局特征。再次,为模糊不同工况下相同故障的分布差异,对残差块进行结构优化,使用小卷积核提取局部特征,以拼接的方式与膨胀卷积进行特征融合,兼顾轴承振动信号中的全局特征与局部特征;最后,针对一个周期内样本数据巨大且不同工况下样本分布存在差异等问题,对数据样本进行降采样,从而简化训练样本,进而降低训练耗时。
1 传统时域卷积神经网络
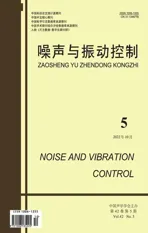
传统时域卷积神经网络(TCN)由具有相同输入和输出长度的扩张的、因果的一维卷积层组成,其本质为一维卷积神经网络,但是其在一维卷积层的基础上添加了因果卷积、膨胀卷积和残差链接。与传统一维卷积神经网络不同的是,由于膨胀概念的引入,使得相同卷积层数的条件下,TCN具有更大的感受野。
因果卷积:“t”时刻的输出值只依赖于上层网络中“t”时刻及之前的输入,使得之前的数据可以更好地融入到未来的数据中,是一种严格的时间约束模型。
膨胀卷积:当卷积神经网络的“kernel_size”为k时,n层卷积层的接受野r如公式(1)所示:

若满足接受野为序列的整体输入长度,即l(input_length)时,所需的最小层数如公式(2)所示:

此时的网络层数将非常巨大,导致参数量巨大,从而需要更长时间训练。因此,TCN引入膨胀概念,如图1 所示。与一维卷积不同的是,膨胀卷积可以一次跳过d个输入宽度,从而可以获得更大的感受野。给定一个基数“b”,其计算方式如公式(3)所示:
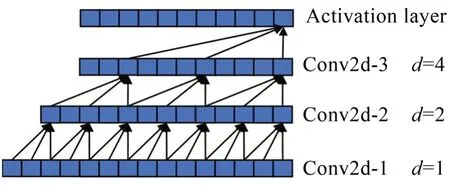
图1 TCN原理图

(i为当前卷积层数值)计算当前层数的膨胀d。引入膨胀卷积后,在输入长度为l时所需层数如公式(4)所示:

残差连接[17]:时域卷积神经网络用一个残差块来代替一层的卷积。残差网络内部的残差块采用跨层连接,使得信息可以跨层传输,残差块内部使用“Dropout”来防止过拟合问题,同时还能有效缓解梯度消失问题。
2 改进的时域卷积神经网络故障诊断方法
2.1 改进的膨胀卷积
传统膨胀卷积仅由卷积层构成,当膨胀系数大于卷积核尺寸时,感受野会出现空洞,因此对于轴承振动信号等高维输入,膨胀卷积仍然有较深的网络结构,较深的网络结构难以训练,并且训练耗时巨大。同时,较深的网络结构虽然可以挖掘出轴承振动信号中的更深层特征,但是当轴承运行工况发生变化时,全卷积层的网络结构会发生严重的过拟合现象。针对以上不足,本文改进膨胀卷积的网络结构,在卷积层后添加池化层,其网络结构如图2所示。
由图2 可知,相邻两个卷积层之间增加的感受野由公式(5)计算:
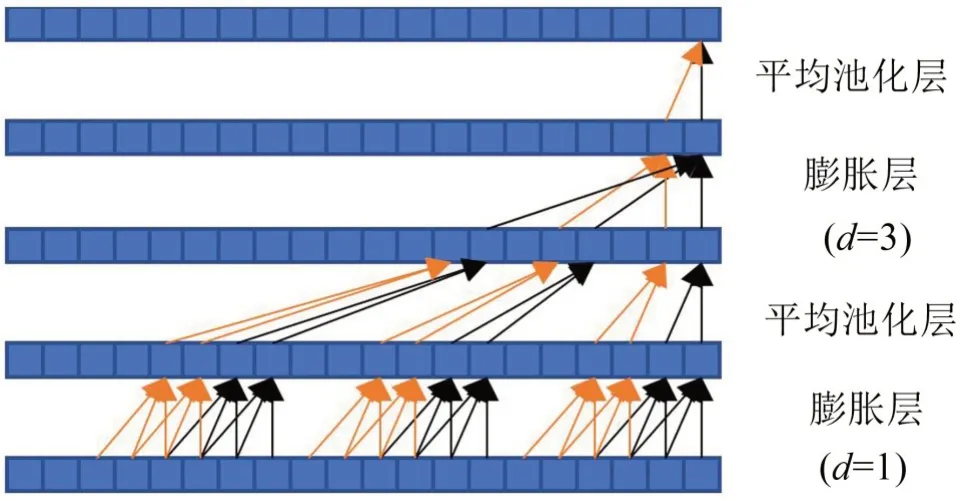
图2 改进的膨胀卷积结构示意图

Δl:相邻两卷积层间感受野之差;
k:卷积核大小;
b:膨胀系数;
n:网络层数
池化后,感受野增加一倍,其感受野计算方法如公式(6)所示:

增加池化层后,在网络层数相同的条件下,改进的膨胀卷积的感受野约为传统膨胀卷积的2n倍。因此大大降低了模型的复杂程度,减小模型参数量,同时可以有效解决因模型参数量过大导致的难以训练等问题。
2.2 改进的残差块与特征融合
在变负载与变速条件下,滚动轴承会出现幅值变、脉动冲击间隔、采样相位不恒定和信号噪声污染等问题,导致不同工况下同种故障类型的振动信号存在差异,同时,对于轴承振动信号这种复杂的高维数据,传统残差块采用跳跃连接的方式,使用小卷积核提取局部特征后与卷积层以简单相加的方式进行特征融合,会出现大量冗余特征,导致故障诊断准确率下降。为挖掘变工况条件下相同故障的共同特征,同时缩减差异,降低数据维度,从而降低训练时间,本文对传统残差块进行改进,其网络结构如图3(a)所示。
图3 TCPN残差卷积神经网络
改进后的残差卷积由膨胀卷积层和残差块两部分组成,其中特征提取层由两层卷积神经网络和两层平均池化层组成,残差块由卷积层、平均池化层和Dropout 层组成。膨胀卷积层用于挖掘轴承振动信息包括时序信息的全局特征,当膨胀卷积的感受野为样本整段序列时,膨胀卷积的网络依旧很深。残差块将原始输入进行卷积运算后,再进行平均池化,从而模糊信号的细节特征,并且与膨胀卷积提取的特征以拼接的方式进行特征融合,既保留了原始振动信号的浅层特征,又包含深度学习挖掘出的深层特征,同时可避免因特征简单相加而造成的信息丢失,从而增强模型的鲁棒性,以适用于变工况条件下轴承故障诊断。
2.3 构建故障诊断模型
针对滚动轴承在实际工作环境因工况发生变化和含有环境噪声等问题而导致故障诊断准确率低以及鲁棒性较差等问题,提出一种改进时域卷积池化神经网络故障诊断方法。其诊断模型结构如图3(b)所示。首先,使用短时傅里叶变换,将一维振动信号转化为二维时频矩阵,再将二维时频矩阵平铺为一维时频序列,作为模型输入;然后,经过膨胀系数分别为1、3、9的三个带残差块的膨胀卷积层进行特征提取,卷积核大小分别为5、10、15。膨胀卷积与残差块均使用平均池化,残差块的Dropout 参数设置为0.5。最后获取“softmax”层输出后使用支持向量机作为分类器对样本进行分类。
3 测试实验
3.1 数据来源
为保证实验结果真实可靠,实验数据取自美国凯斯西储大学轴承公开数据集,实验轴承为SKF6203-2RS 滚动轴承[18-21]。数据分为正常状态、滚动体故障、内圈故障和外圈故障四类。其中每种故障由电火花在轴承不同位置点蚀而成,深度为0.28 mm,点蚀直径分为三种,分别为0.18 mm、0.36 mm、0.53 mm 共10 个类别,即9 种故障状态一种正常运转状态。该振动信号通过记录器采集,采样频率选用48 kHz,转速为1 730 r/min[22-23]。轴承转动一周的样本点个数计算方法如公式(7)所示:

本实验采用轴承转动一周的数据点为一个样本,即一个样本包含1 600个数据点。本次实验采用滑窗取样法,为避免样本之间存在重叠,本实验滑动步长设置为1 600。不同故障类别样本噪声图像如图4所示。
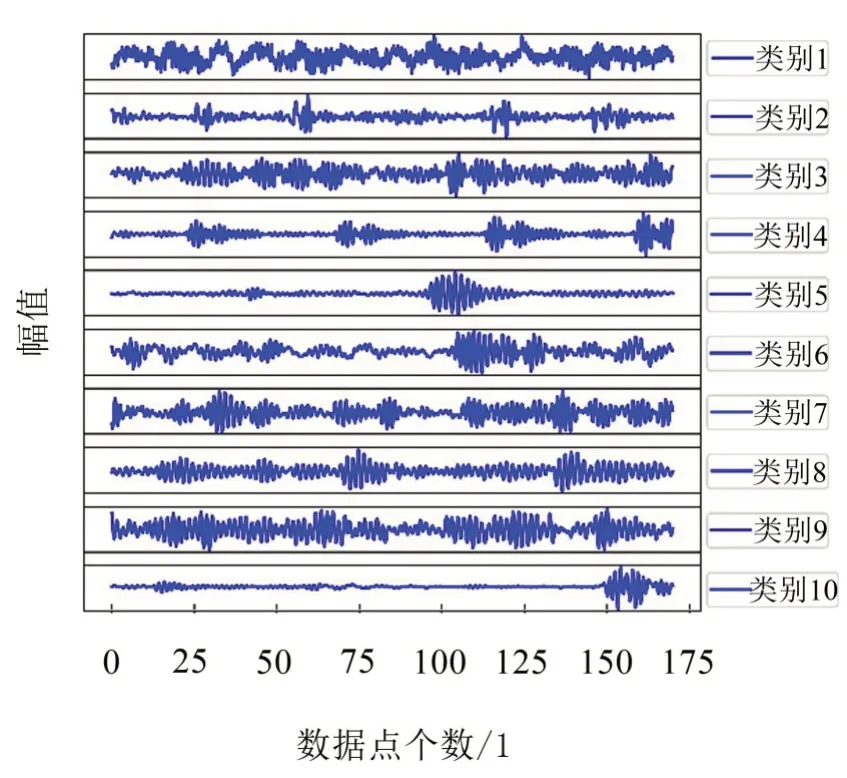
图4 不同类别承噪声信号图
3.2 数据预处理
轴承振动信号是一种复杂的非平稳时间序列[24-25],若直接将振动信号作为模型输入则会丢失很多信息,为了尽量挖掘信号中隐含的深层特征,采用短时傅里叶变换,将一维时域信号转化为二维时频数据(矩阵非图像),再将其展开为一维时频信号,由于“relu”激活函数无法激活负值,因此对短时傅里叶变换后的一维时频序列取绝对值。原始轴承噪声信号与经过短时傅里叶变换后的图像如图5所示。
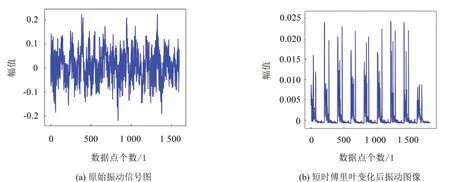
图5 傅里叶变换前后对比
3.3 不同工况下的数据集
传统故障诊断方法主要被应用于样本充足,并且样本分布差异较小的场景。但轴承工作环境复杂,条件多变,轴承在工作时负载并不会恒定不变,而是随工作条件时刻发生变化,尤其在数据不足或者某些极端情况下,传统模型故障分类准确率低,泛化能力差,因此在变负载条件下对轴承进行故障诊断具有重要意义。为探究不同负载对模型分类的影响,本实验共划分A、B、C及ABC 四个数据集,各个数据集样本信息如表1 所示。其中A、B、C 三个数据集的负载分别对应为1 HP、2 HP、3 HP,每个数据集中包含10 种故障类别,每个类别200 个样本,共2 000 个样本。数据集ABC 为数据集A、B、C 的集合,包含三种负载,每个类别600 个样本,共6 000 个样本。为验证在数据量不足以及出现未知负载情况下模型的故障分类性能,在实验AB-C中,A、B两个数据集做训练,C数据集做测试,其中C数据集代表未知负载的数据。
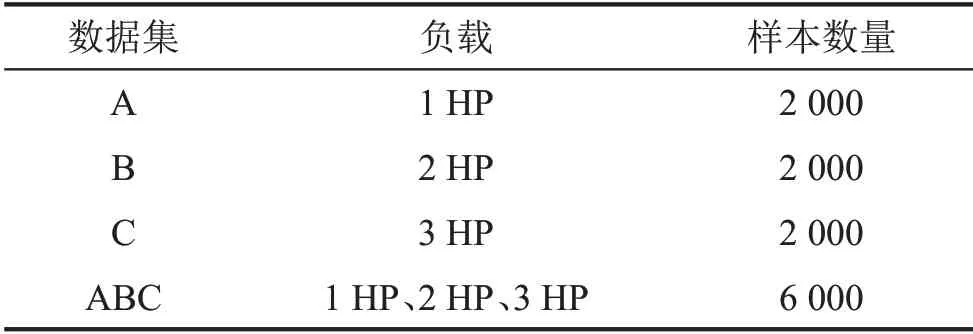
表1 数据集说明
4 实验结果分析
4.1 轴承故障分类实验
本实验采用9:1的比例划分训练集与验证集,在数据集ABC中,随机选取2 000个样本作为测试集。所有实验优化器均选择“Adam”,训练时的“Batch_size”设置为100,迭代次数为100。本实验采用衰减学习率的方法线性调节学习率,学习率最大值设置为0.01,最小值设置为0.000 01,衰减系数设置为0.5,以此来获得更好的收敛速度。超参数设置如表2所示。
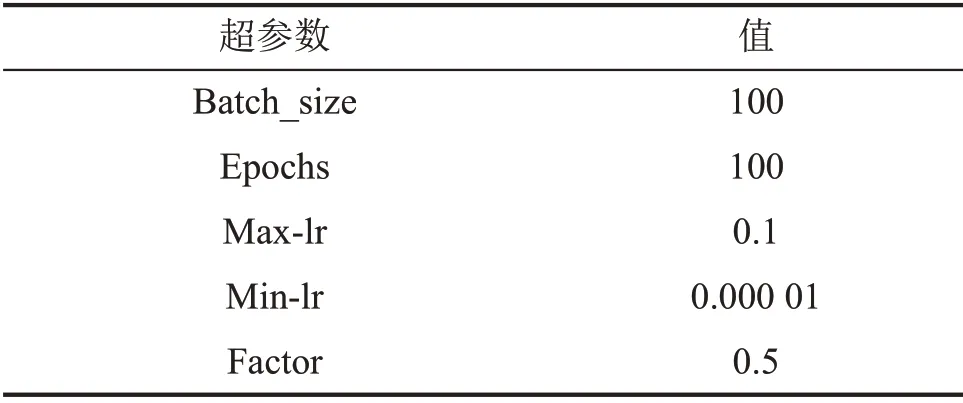
表2 超参数设置
在训练开始时,损失函数较大,因此大的学习率不仅可以使模型快速收敛,还有利于跳出局部最优解;当训练后期,模型接近于收敛时,学习率较大会使模型在全局最优处震荡,因此小的学习率会使模型更接近于全部最优解。
为验证提出模型的故障分类性能,将所提出的方法与CNN、DNN、TCN以及文献[26]所提出的FDCCN模型实验结果进行对比,实验结果如表3所示。
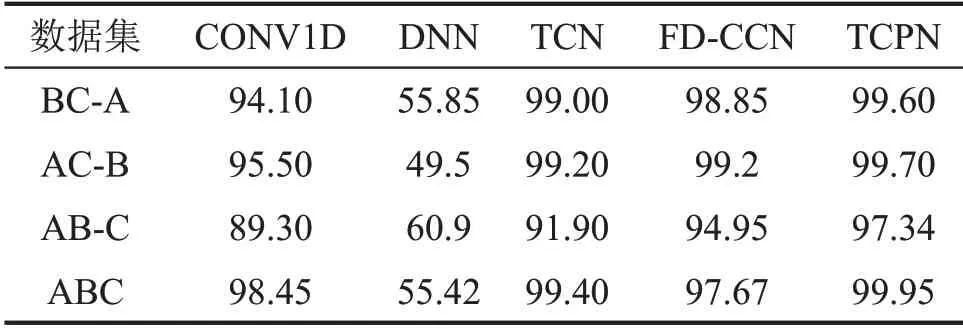
表3 各模型在不同数据集下的准确率/(%)
由表3可知,传统CNN与DNN在变工况条件下无法准确挖掘故障特征,因此分类准确率较低。由于传统TCN具有更大的感受野,其准确率略高于文献[26]所提出的方法,除实验AB-C 外,均在99%以上。本文提出的TCPN模型在其他三个实验中准确率提升0.5%左右,在实验AB-C 中提升3%到5%,在混合实验中,准确率接近100%。不仅如此,文献[26]提出的方法需要10 000 次的迭代次数,传统CNN 模型仅需要100 次迭代即可收敛,而由图6(a)可知,本文提出的PTCN模型收敛速度更快,迭代约40代即可完全收敛,由此可以证明本文提出方法的可行性。
各模型训练耗时如图6(b)所示。不足的是,相较于一维卷积神经网络,传统TCN虽然故障诊断准确率提升了1 %~5 %,但是训练耗时却高达240 μs/step,约为CNN 的2 倍。虽然本文提出的TCPN模型准确率在传统TCN的基础上有所提升,训练耗时降低约30%,但是对比CNN,训练耗时仍然高出40%。分析其原因在于TCN 模型中巨大的感受野虽然挖掘了全局特征,提升了准确率,但是也增加了模型的复杂程度,尽管TCPN优化了模型结构,减少了参数量,但是在全局特征与局部特征拼接的过程中,故障特征维度依旧高于传统方法。
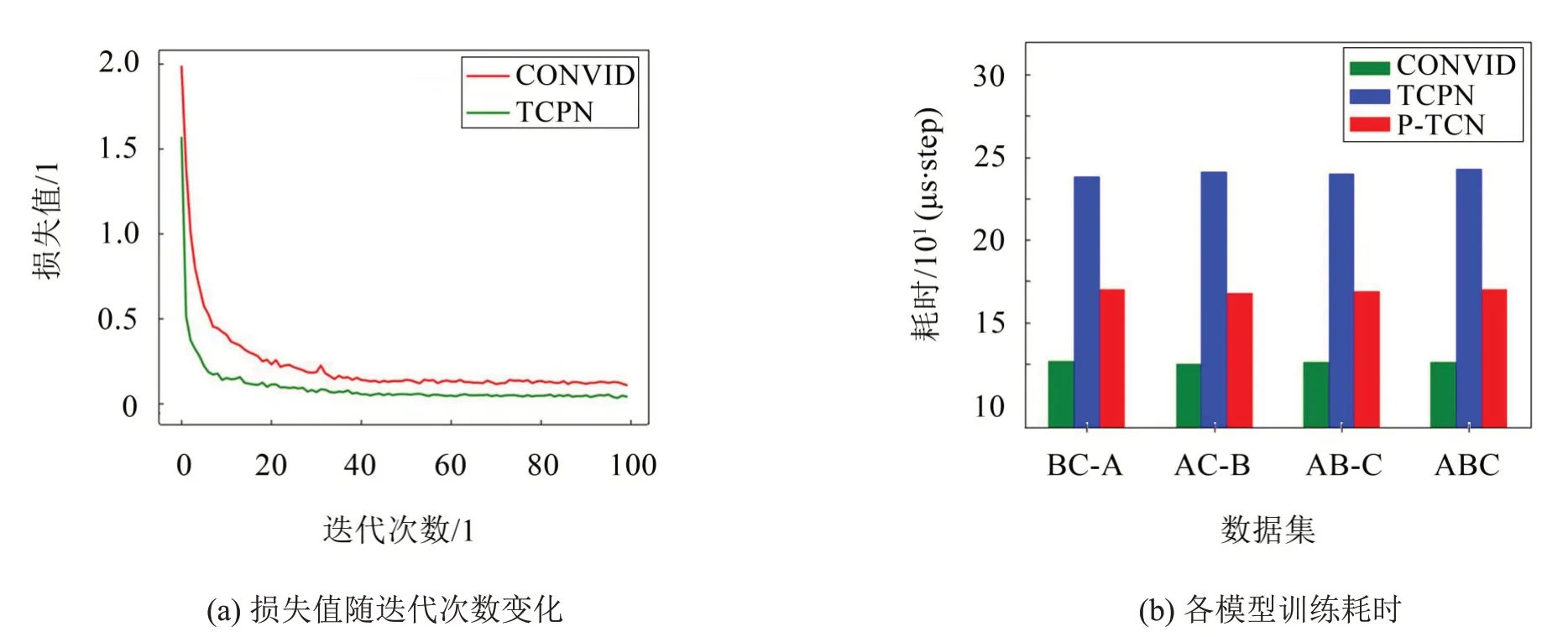
图6 轴承故障分类实验结果
4.2 样本缩减实验
文献[27]认为变工况条件下轴承振动信号中存在大量不相关、冗余的特征,为进一步去除数据分布差异,降低输入特征维度,降低模型训练耗时本文对样本进行数据简化,即仍然采用轴承转动一周的振动信号为一个样本,并对样本数据进行降采样,不同采样频率降采样后的振动信号如图7(a)所示。
由图可知,降采样后,样本丢失了大量细节信息,但轴承转动一个周期内的噪声趋势不变。为探究降采样步长对故障诊断准确率的影响,本文对实验样本进行均匀采样,降采样后不同实验的准确率、耗时变化如表4、图7(b)所示:

表4 不同降采样步长在各数据集的准确率/(%)
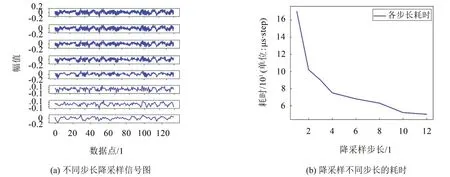
图7 降采样实验结果图
由实验结果可知,原始轴承振动信号存在大量不相关的冗余特征,当降采样频率小于4时,该振动信号既保留了故障特征,又忽略了轴承转速及负载变化而导致的数据集间的分布差异,因此准确率有所提升,同时,由于降采样后,样本的数据点减少,因此每个“steps”的训练耗时逐渐降低,当采样频率为2时,模型所需要的训练时间就低于传统一维卷积神经网络;当降采样频率大于4时,虽然样本的数据点更少,噪声更少,但是信号的特征也被过滤,因此虽然训练耗时大大减少,但是准确率也相应降低。
综上,降采样实验步长为3时,本文提出的模型在不同数据集的准确率均高于文献[26]所提出的模型以及CNN模型,准确率提升约1%~4%左右,训练耗时较CNN模型降低30%。
5 结语
5.1 实验结论
提出的时域卷积池化神经网络模型(TCPN)对不同数据集进行实验,实验结果表明:
(1)利用膨胀卷积巨大的感受野,挖掘轴承振动信号的全局特征与改进的残差块挖掘的局部特征以拼接的方式进行特征融合的方法可以有效减小不同工况间数据集的分布差异,从而提升准确率。由实验结果可知,准确率较CNN模型提升约5%,较文献[26]提出的FD-CCN模型提升0.5%到2.5%,较传统TCN提升0.5%到5%。
(2)提出的TCPN模型由于加入池化层,使得网络结构更简单,模型参数量更小,从而收敛速度更快,迭代40次即可收敛,远低于文献[26]提出的FDCCN模型的10 000代。
(3)轴承振动信号中存在大量冗余特征,对样本进行降采样可以在一定程度上减少冗余特征。当采样频率小于4 时准确率有小幅度提升,当采样频率为3时准确率接近100%,且训练耗时降低47%,比传统一维卷积神经网络低30%。
5.2 实验不足
(1)在变工况AB-C 实验中,本文提出的方法准确率虽然提高了9.55%,但是仍低于99%,对比于AC-B以及BC-A数据集,准确率有待提高;
(2)在样本降采样实验中,分类混淆矩阵如图8所示。由图可知,当采样频率大于4 时,只有类别2与类别6、类别4与类别8难以区分,其余类别仍然可分,但TCPN未解决该问题。
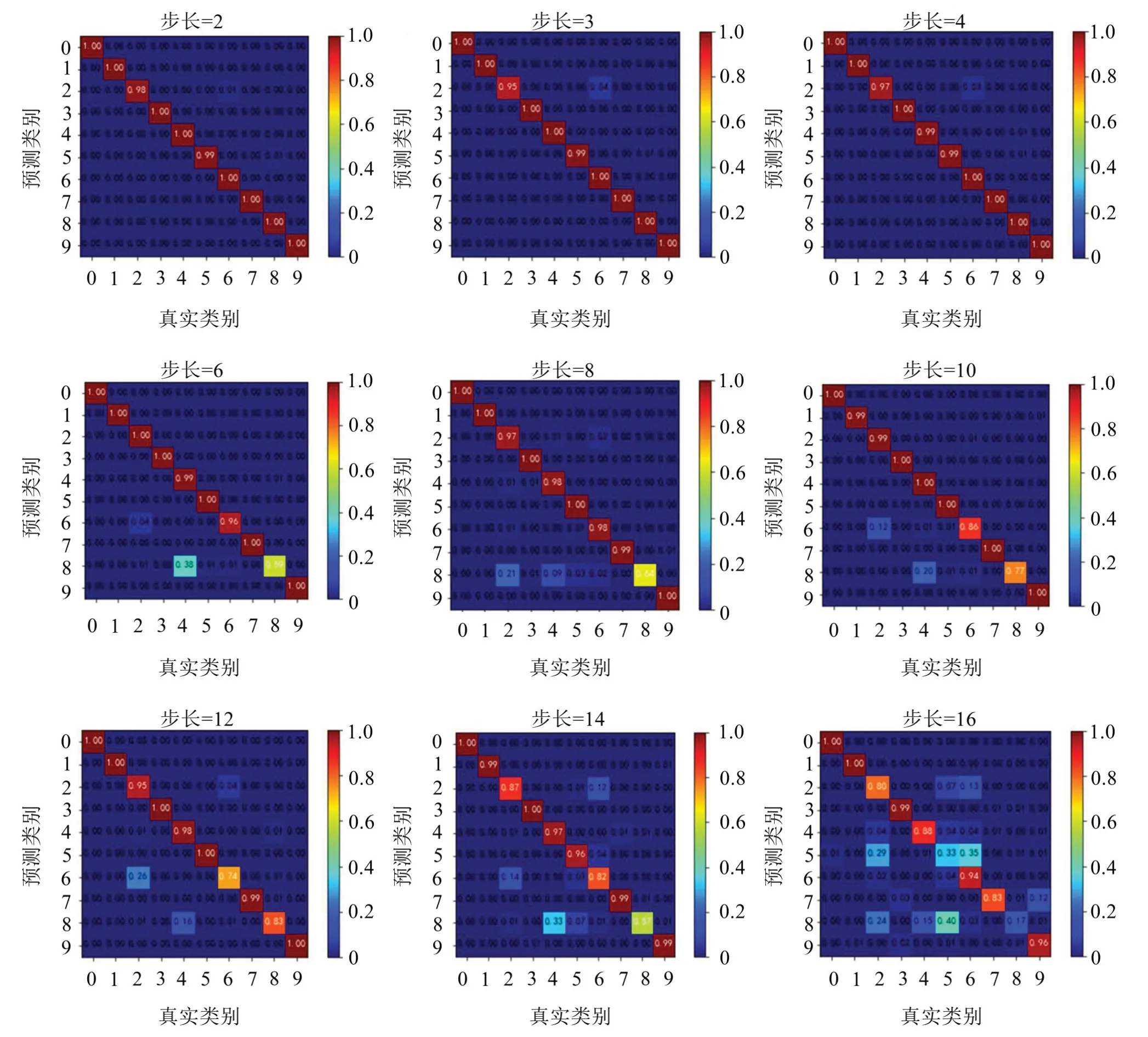
图8 不同采样频率下的混淆矩阵