基于UG的水果筛选封装一体机结构设计
2022-10-20董绍富刘成义张桐语刘家全穆德敏
董绍富 , 刘成义 , 张桐语 , 樊 伟 , 刘家全 , 穆德敏,2
(1.沈阳工学院机械工程与自动化学院,辽宁 抚顺 113122;2.沈阳工学院辽宁省数控机床信息物理融合与智能制造重点实验室,辽宁 抚顺 113122)
0 引言
自改革开放以来,我国科技发展势头迅猛,一举跻身到了制造业大国的行列,并获得了“世界工厂”的殊荣。随着果园面积和规模的不断扩大,果实的采收、筛选和封装成为果农的一大问题,大多数采用机械化采收。目前,一些筛选机构与封装机构在位置精度的确定和占地面积上缺陷较多,如体积过大,不便移动[1]。
本文基于上述问题,设计了一款新型的水果筛选封装一体机。应用平行四连杆机构、电动螺杆以及双导轨导向定位等几个功能模块执行机构实现水果的筛选、封装功能,并在此基础上增强装置机动性。采用喷雾器和电动毛刷对果实进行清洗,以铝型材作为支撑,使用Arduino微控制器完成各模块间的运动控制,满足高精度、高承载和高效率的要求。
1 水果筛选封装一体机项目概述
1.1 水果筛选封装一体机的整体结构
设备整体采用立式布局,外壳使用车体结构,外部设置推把,可通过人力推动,将其移动至不同的加工场景,满足果农对不同加工场景的需要[2]。
机身外壳设置多处检修口,不仅便于检修,还可用作耗材补充口,各检修口上方设置有挡板,使用电动推杆完成进给运动,起到防尘的作用。机身及内部各模块设备使用具有优良力学性能的铝型材完成固定及支撑,由下至上,完成支撑结构的建立,大大提升了结构的稳定性。
筛选缸与清洗机构紧贴,采用六点定位的方式被固定在机身外壳上,底部由铝型材作为支撑,侧面由螺栓完成螺纹夹紧固定工作。榨汁机构设置在筛选缸下方,其上部漏斗紧贴筛选缸底部,与筛选口匹配,并起到了支撑作用[3]。封装机构使用三排料道,经筛选后的果实分别落入软管料道和漏斗中,起到了缓冲作用,避免果实因碰撞影响品质。两侧为果实封箱料道,布置有电动倾斜板、送盖机构和压盖机构。中间为果汁封装料道,布置有榨汁机构与果汁封装机构。并在传送带上布置导向机构,防止箱体在运行时发生位置偏移。在料道的传送带上布置限位挡板,防止在多工序同时运行时相互干涉。设备整体结构设计如图1所示。

图1 水果筛选封装一体机的整体结构图
1.2 水果筛选封装一体机的工作原理
设备经由人力推送到所需工作场景中后,可使用遥控器或按键开启设备。设备开启时,各挡板收起,准备工作,其工作流程如图2所示。
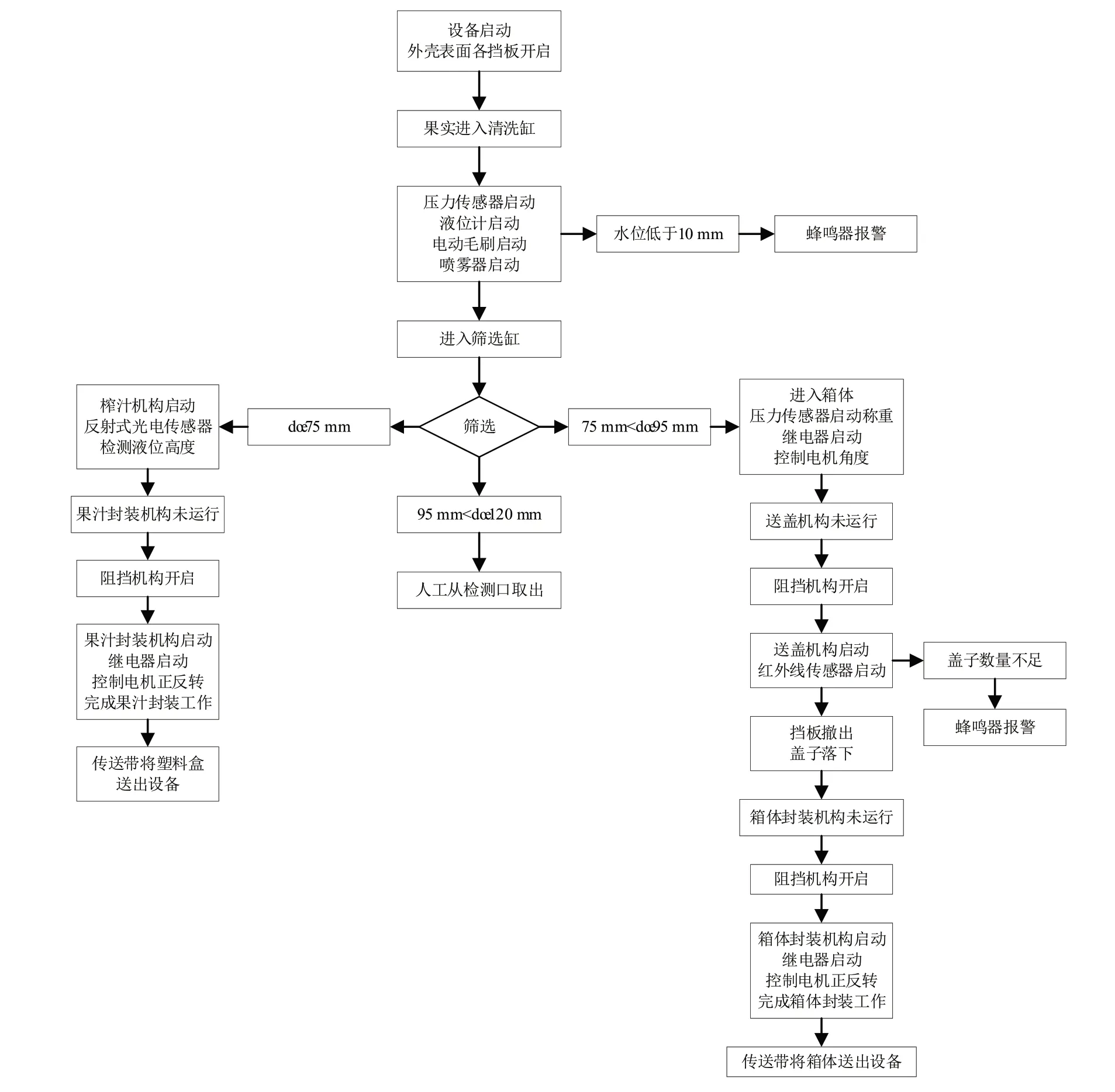
图2 水果筛选封装一体机工作流程图
果实通过上盖入口进入清洗缸中。在果实被置入清洗缸的同时,压力传感器启动,测算果实质量。继电器接收信号,电动毛刷与喷雾器启动,先喷药、再喷水,电动毛刷带动果实,对果实进行清洗消杀工作。经清洗消杀后的果实被推入分选轨道,依照果实尺寸,由小到大,依次落入分选管道中。不满足要求且尺寸较小的果实会被用于榨汁,其余符合要求的果实会经由软管料道落入箱体中,准备封箱工作[4]。尺寸过大的果实可以打开机身外壳顶部设置的检测口将其取出,再决定其用途。
电机带动卷筒旋转,将塑料布置于塑料盒上,热封头开始升温,将塑料布熔化。此时螺杆运动,完成下压工作,移至最大行程处,保压1 s~2 s,冷却头工作,塑料布冷却凝固。
经筛选后的小果实落入榨汁机构的漏斗中,完成榨汁工作,果汁流入下方塑料盒中,经由反射式光电传感器检测液位高度,当液面处于一定高度,且果汁封装工序内未检测到箱体存在时,限位挡板开启,塑料盒进入果汁封装机构。
经筛选后的大果实通过软管料道落入下方箱体中,压力传感器启动,测算果实质量,箱体下方电动倾斜板上的电机接收反馈信号,依据箱体内果实质量控制转动角度,采取往复运动的形式,并在此基础上控制电机的正反转,完成简单的码放工作[5]。满足箱体内部质量要求后,电动倾斜板上电机转动至最大角度,箱体即会从电动倾斜板上滑下。箱体从电动倾斜板上滑下后,进入传送带,检测到送盖机构下无箱体时,限位挡板开启,传送带将其送入送盖机构中。
送盖机构上方设置有耗材补充口,可将盖子存入机构内,接收到限位挡板开启的信号后,上方电动推杆启动,滑块将上盖推至箱口对应位置,挡片撤出,盖子落下,完成盖子的放置工作。完成放置工作后,检测到箱体封装装置下无箱体时,限位挡板开启,传送带将其送入箱体封装装置中。
箱体进入箱体封装机构后电动机启动,带动螺杆转动,实现螺纹传动,压板下压,完成箱体封装工作。完成箱体封装工作后,限位挡板打开,传送带将箱体送出设备。
2 水果筛选封装一体机结构设计概述
2.1 水果筛选封装一体机的主要技术参数要求
电源:220 V,50 Hz;功率:370 W;工作方式:电动;生产能力:150 kg/h左右;筛选果实:苹果;直径d:1)d≤75 mm,2)75 mm<d≤85 mm,3)85 mm<d≤95 mm,4)95 mm<d≤120 mm;外形尺寸:长1 750 mm×宽1 190 mm×高1 455 mm。
2.2 清洗机构的结构与控制系统设计
2.2.1 清洗机构的控制部分
清洗机构由Arduino微控制器完成整个流程的控制工作,水果筛选封装一体机需依靠Arduino微控制器完成整个机体的控制,但其额定电压仅有5 V,而外接电源和用电器的额定电压皆为220 V。因此,需加装继电器,达到弱电控制强电和保护电路的效果。
清洗机构中,Arduino微控制器主要被应用在电动毛刷的旋转运动、压力传感器的测算、喷雾器的喷洒和储水箱的液位监测工作上。
2.2.2 筛选缸的结构设计部分
在筛选装置中,筛选缸紧贴清洗缸,并在缸体底部设有缓冲管道。其布置形式如图3所示,采用六点定位的形式对筛选装置进行完全定位。清洗缸与筛选缸在水果的运动轨迹上布置胶皮,不仅起到了保护果实表皮的作用,还在表面有水为润滑条件的情况下,起到减小摩擦的作用[6]。

图3 筛选缸俯视图
筛选装置采用螺旋轨道,使用圆角作导向,降低果实表皮的破损风险,且可分散应力,防止应力集中,在受力上更便于实现果实的运输工作。
筛选缸可筛选的果实直径有以下四种:1)d≤75 mm,2)75 mm<d≤85 mm,3)85 mm<d≤95 mm,4)95 mm<d≤120 mm。
筛选装置中的每个筛选口都比被筛选果实的直径大5 mm,并在筛选口处设置45°倒角,保障满足尺寸要求的果实在通过相应筛选口时进入下方管道。筛选缸中的导向板间距为120 mm,相对常规尺寸大5 mm,有少部分超过正常水平的果实可通过机体外壳上方的检测口将其取出,具体用途,可参考果农实际需求将其置于不同的机构内[7]。
d≤75 mm的果实被用于制作果汁,经清洗消杀工作后,果实落入榨汁机构中,完成榨汁工作。75 mm<d≤95 mm的果实会被送入箱体,进行码放作业。
2.3 封装部分结构设计
果实的封装机构包含压力板、压力传感器、送盖机构等,如图4所示。主要运动依靠电机带动螺杆,通过螺纹的有效距离,将曲线运动转化为直线运动,完成封装压盖部分的直线进给运动[8]。

图4 封装机构
2.4 其他零部件结构设计
2.4.1 送盖机构结构设计
送盖机构包括支撑架、直线导轨、滑块、挡片和挡板等,采用立式布局,主要运动依靠电动推杆带动滑块,完成箱盖存储和输入的进给运动。
在果实完成筛选工作后,通过管道置入箱体的过程中,压力传感器对箱体重量进行测算,每增加一定的重量,电机便会旋转一定的角度,直至最终倾斜角度足够使箱体滑入传送带中,再经由横梁完成箱体的导向,进入压盖输送口下方[9]。
送盖机构起到了将上盖置于箱体上的作用,另外可通过侧口及时补充压盖,当机构中的压盖不足时,红外传感器反馈信号,提醒果农及时补充压盖,机体检测到电机反转时将箱体送至压盖机构。
2.4.2 压盖机构结构设计
压盖机构采用推送的原理,使用电机带动螺杆,将曲线运动转化为直线运动,实现进给运动。下方使用滚子下压四边封装扣,使用弹簧作为压力的缓冲,完成压盖封装工作,机体检测到电机反转后,传送带将箱体送出[10]。
3 结论
本文经过对水果筛选封装一体机的结构设计,得出以下结论:
1)采用了机械式自动分级技术完成筛选工作,虽在检测指标上具有一定的局限性,但极大地提高了生产率,且相对更容易实现,并在此基础上增加了清洗消杀的功能。
2)本设备的封装定位主要通过阻挡装置、导向板、导向装置和平行四连杆等机构完成。进给运动主要靠电机带动螺杆,使曲线运动转化为直线运动完成。另外,由下至上,使用铝型材结合三角架的支撑方法,极大地提升了结构的稳定性。
3)本设备采用Arduino微控制器完成各执行机构间的运动控制和数据监测,其体积小、适用范围广的特点符合设备设计要求。
