基于PSD的超精密小型机床几何误差测量系统
2022-10-19廖璘志罗宗平
廖璘志,陈 琪,罗宗平
(1.宜宾职业技术学院智能制造学院,四川 宜宾 644003)(2.韩国培材大学计算机工学系,大田 35347 )
在超精密加工中,实现高精度和复杂形状零件的加工非常重要[1]。超精密小型机床已被开发用于加工微米级范围的精密零件,常用于加工超精密产品的MEMS(micro electro mechanical system,微机电系统)半导体零部件。
几何误差是影响小型机床精度的主要因素之一,主要是由于零件加工不准确、装配不合格、变形或磨损造成的,因此在开始加工之前必须测量和校正几何误差。传统的几何误差测量是用激光干涉仪、电子水平仪等进行测量[2-4],测量设备体积很大,难以安装在机床上,且一次安装无法实现六自由度的误差测量,测量时间长且成本比较高[5]。
目前,已开发出一种使用激光和光学传感器的测量系统作为替代方案。Bae等[6]利用光束偏转和三角关系的方法进行测量,其测量范围仅限于激光源光束的半径。Prather[7]提出了由3个垂直激光束和3个PSD(position sensitive detector,位置敏感器件)的激光模块组成的测量系统,该激光模块的制造和装配比较困难,造成了一定的局限性。Lee等[8]在三轴小型机床中使用电容传感器测量每个轴的几何误差和垂直度误差。Lee等[9]提出了使用3个PSD对6个自由度几何误差进行测量,测量范围受限于PSD自身的有效范围,与机床行程范围相比非常小。
本文提出了一种六自由度几何误差测量系统,通过扩大测量范围提高几何误差测量精度的准确性[10]。使用推导测量系统的误差估计算法,仿真研究了高阶误差项消除对误差估计算法精度的影响和安装误差导致测量系统精度下降的程度,并进行了测量实验。
1 六自由度几何误差测量系统
如图1所示,六自由度几何误差测量系统由激光模块和PSD模块组成。激光模块由2个激光二极管和1个反射镜组成。PSD模块由1个分束器和3个PSD组成,其安装在工作台上。光束源S1被分束器分成两束并投射到PSD2和PSD3上,光束源S2被反射镜以特定角度θ反射后投射到PSD1上。由于当前几何误差测量系统在测量时局限于PSD的有效测量范围,而且大部分工作台的移动距离远大于PSD的有效测量范围,因此通过改变反射镜的反射角θ来扩展可测量范围。使用3个二维 PSD 计算6个几何误差,获得6个有效数据。
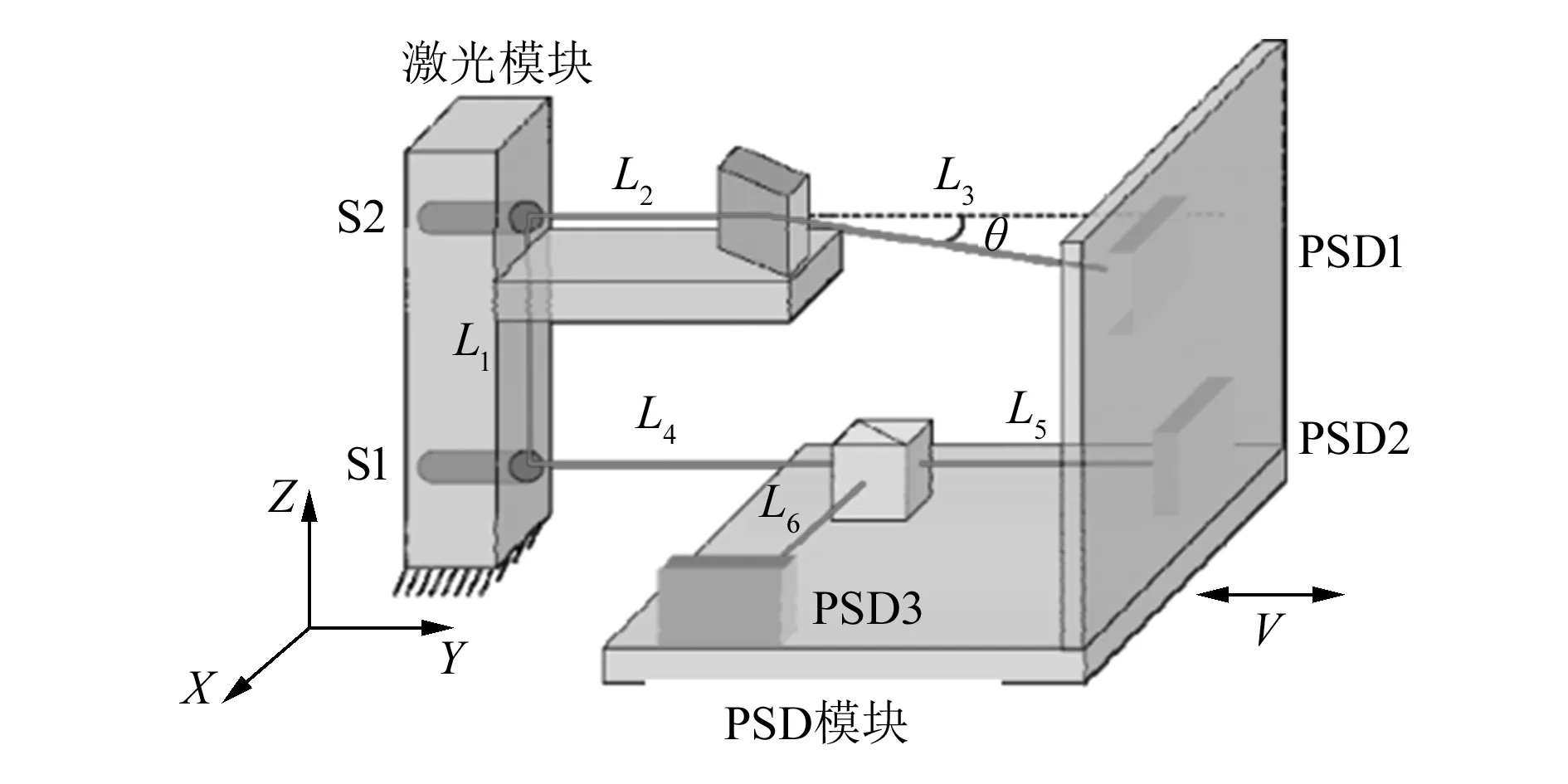
图1 六自由度误差测量系统的配置
1.1 几何误差与PSD输出值的关系
一般来说,所有的误差都是由安装在工作台上的PSD模块同时移动产生的,PSD输出值包含了所有的几何误差值。使用齐次变换矩阵,得出了输出值和几何误差之间的数学关系:
(1)

1.1.1PSD1的向量分析
如图2所示,参考坐标系{R}设置在光束源S1的初始位置。虚线是工作台移动前光束源的路径,实线是工作台移动后光束源在Y轴上的实际路径。

图2 位置传感器1的激光束

矢量分析方程为:
(2)
(3)
(4)
(5)
(6)
(7)

从式(2)中可以得到x,y,z分量的3个表达式,求解后得到的x1和z1为PSD1的几何误差。
x1=[εzcosθ(L3+εxL1-δy-y)-sinθ(δy+y-L3-εxL1)]/(cosθ+εzsinθ)+δx-εzL2+εyL1-L3tanθ
(8)
z1=[εxcosθ(-δy-y+L3+εxL1)]/(cosθ+εzsinθ)+δz+εxL2+[εysinθ(δy+y-L3-εxL1)]/(cosθ+εzsinθ)
(9)
式中:y为参考坐标系{R}沿Y轴方向移动的距离。
1.1.2PSD2的向量分析


图3 位置传感器2的激光束
矢量分析方程为:
(10)
(11)
(12)
通过式(10)~(12)组合求解,PSD2的输出值与几何误差的关系可以表示如下:
x2=δx-εz(-δy-y+L4+L5)
(13)
z2=δz+εx(-δy-y+L4+L5)
(14)
式中:x2和z2为PSD2的几何误差。
1.1.3PSD3的向量分析
来自S1的光束源被分束器反射并投射到PSD3上。将式(13)和(14)中将L5替换为L6,x2替换为y3,z2替换为z3,可以得到 PSD3 的输出值y3和z3。
y3=δx-εz(-δy-y+L4+L6)
(15)
z3=δz+εx(-δy-y+L4+L6)
(16)
式中:L6为分束器到PSD3的距离;y3和z3为PSD3的几何误差。
1.2 6自由度几何误差估计算法
式(8)、(9)和(13)~(16)表示3个PSD的输出值和6个几何误差之间的关系。在误差估计算法中,作为几何误差乘积出现的高阶项被忽略,因此可以得到如下6个几何误差值:
x1=[-εzsecθL3-sinθ(δy+y-εxL1)]/(cosθ+εzsinθ)+[cosθ(δx+εzy-εzL2+εyL1)]/(cosθ+εzsinθ)
(17)
z1={εysinθ(y-L3)+cosθ[δz-εxy+
εx(L2+L3)]}/(cosθ+εzsinθ)
(18)
x2=δx+εz(y-L4-L5)
(19)
z2=δz-εz(y-L4-L5)
(20)
y3=δx+εz(y-L4-L6)
(21)
z3=δz-εx(y-L4-L6)
(22)
按照仿真计算流程(如图4所示),研究去除高阶误差项对误差估计算法精度的影响。从几何位置误差-100~100 μm,角度误差-200″~200″中选择一个随机值,利用式(8)、 (9) 和 (13)~(16) 计算PSD 的输出值。通过对比PSD输出值和误差估计算法估计的6个几何误差,比较实际误差和估计的几何误差之间的差异。

图4 仿真计算流程图
仿真结果表明,实际几何误差与估计几何误差之间存在差值位置误差为±1 μm,角度误差为±3×10-10″。 因此,去除高阶误差项对算法的准确性影响不大。
1.3 安装误差引起的误差估计算法分析
在安装每个光学器件时,由于激光束的理想路径与实际路径不完全一致,会出现安装误差,从而降低误差估计算法的准确性。为了减小安装误差,将测量系统的所有元件制作成激光模块和PSD模块,不但降低了安装误差,而且可以简化安装过程。通过仿真分析了由安装误差引起的误差估计算法对几何误差的影响,将各光学器件的理想坐标系和由安装误差所改变的坐标系用齐次变换矩阵表示,研究方法类似于1.1。
(23)
式中:εmx,εmy,εmz为光学器件安装后X,Y,Z方向几何误差。
将改变后的坐标系乘以式(23)的齐次变换矩阵,可以得到3个PSD的输出值、几何误差和安装误差之间的关系。求出安装误差引起的PSD各自的输出值,利用误差估计算法估算几何误差。
取几何位置误差-20~20 μm,角度误差-20″~20″中选择一个随机值,通过随机100 次的仿真,结果见表1,由表可知,安装误差对估计算法的影响很小。
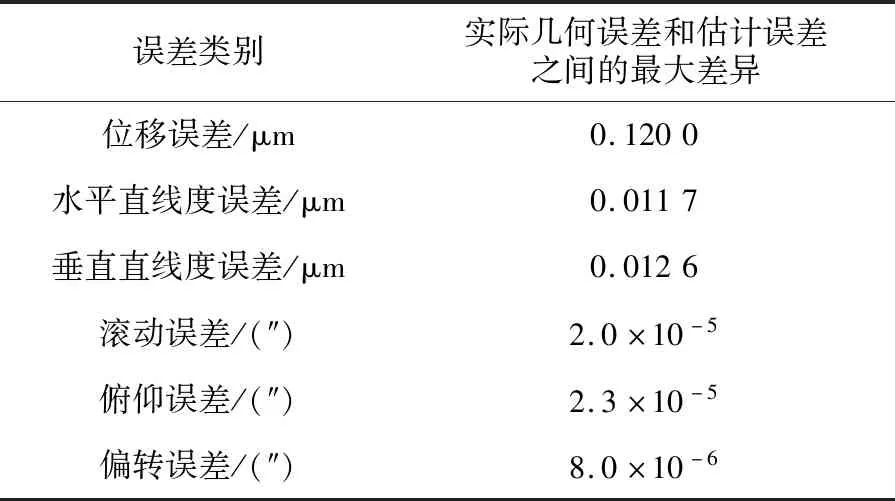
表1 安装误差的影响
2 实验
2.1 测量系统的安装
测量设备如图5所示,测量系统实物如图6所示。

图5 测量设备

图6 测量系统实物
元器件分别为:激光二极管(功率:5 mW;波长:655 nm;光束直径:0.15 mm)、位置传感器(有效范围:4 mm×4 mm;分辨率:100 nm)、分束器(角度公差:3′;尺寸:10 mm×10 mm×10 mm;分离比率:50/50)、反光镜(表面平整度:λ/10;尺寸:1.5 mm×1.5 mm)。安装参数如下:L1=15.0 mm,L2=158.1 mm,L3=41.8 mm,L4=141.9 mm,L5=36.2 mm,L6=74.9 mm,镜面角度:θ=18°,在实验中,将反射镜的角度调整为18°进行实验,这样可以使系统的可测量范围增加3倍。
2.2 实验结果
实验一,在小型机床中安装六自由度几何时误差测量系统来测量Y轴的6个几何误差——位移误差、水平直线度、垂直直线度、滚动误差、俯仰误差和偏转误差[11]。由于镜面角度的调整,PSD1 的分辨率降低到约 300 nm,可测量范围增加到 12 mm。
实验二,使用激光干涉仪 (Renishaw XL80) 测量6个几何误差。测量结果如图7~图12所示,结果表明,使用PSD的测量系统,位置误差的精度为±1 μm,滚动、俯仰和偏转误差的精度为±3″。

图7 线性位移误差及差异测量结果

图8 水平直线度误差及差异测量结果

图9 垂直直线度误差及差异测量结果

图10 滚动误差

图11 俯仰误差及差异测量结果

图12 偏转误差及差异测量结果
3 结束语
本文使用六自由度几何误差测量系统可以在加工误差范围内估计出6个自由度几何误差,系统由两个模块构成,不仅可以将安装误差降至最低,而且也简化了安装过程,扩展了受限于 PSD 有效测量范围的可测量范围。结果表明,该测量系统在测量超精密小型机床时的位置误差为±1 μm,角度误差为±3×10-10″,具有一定的参考实用价值。
