基于双曲线渐近线与TDOA的定位模型研究
2022-10-18李轩孙先松秦禹杰胡寅红黄志杰孟麟
李轩 孙先松 秦禹杰 胡寅红 黄志杰 孟麟

摘要:针对传统双曲线定位模型求解计算较為复杂,低端微处理器无法满足实时定位运算需求的问题。该文对传统双曲线定位模型做出改进,研究了一种基于双曲线渐近线和TDOA的二维平面定位模型,并据此提出了一种三维空间目标定位的设计方案。利用Matlab软件分别对二维平面和三维空间的定位模型进行仿真验证,在STM32单片机上进行二者的运算速度对比,结果表明,该文所提出的定位模型在整体运算速度上要比传统模型快33%左右。
关键词:双曲线定位算法;TDOA;双曲线渐近线;三维空间目标定位
中图法分类号:TN802 文献标识码:A
文章编号:1009-3044(2022)25-0011-04
开放科学(资源服务) 标识码(OSID) :
双曲线定位是传统导航手段当中一种简单易行的方法[1],虽然随着科技的发展,各类定位技术涌现,如目前常见的质心定位法、三角定位法、航卫推算法、粒子群定位算法、神经网络定位算法等[2-4],但由于传统双曲线模型原理简单,且易于实现,如今在航海、航空领域、室内定位仍广泛使用[5]。
定位的指标主要有两点:一是精度,二是实时性。在双曲线定位模型的基础上,对于精度的改良,许多学者都进行了大量的研究。文献[6]提出了利用双曲线定位和广义互相关法来提高定位精度,文献[7]提出了在室内定位中,可添加N个信标点,采用最大似然估计法来提高定位准确度,虽然提高了定位精度,但却给双曲线定位模型引入了新的计算因子,MCU处理器计算目标点坐标的时长增加,定位实时性下降。在目前高端芯片供不应求的情况下,低端处理器运算性能无法满足实时定位的运算需求,采用传统双曲线定位的系统在定位实时性上难以达到较好的效果。
为解决上述问题,本文以传统双曲线定位算法为基础,并加以改善,旨在研究出一个合适的新模型,并提出相对应的算法,简化双曲线定位模型的计算量,提高整体模型的计算效率,进而提高整体系统的定位实时性。
1 基本原理
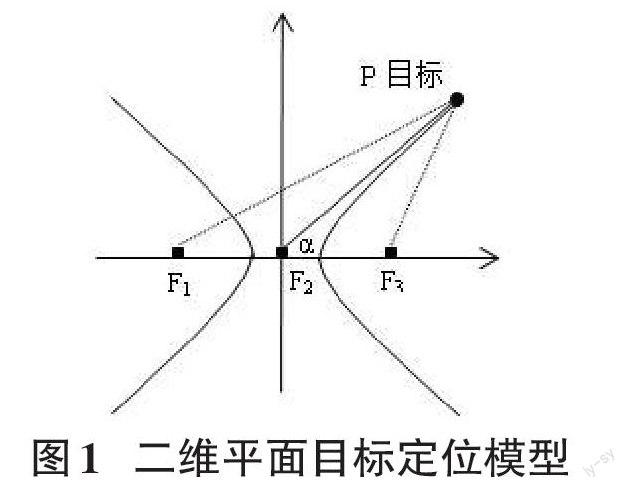
本文提出了一种基于TDOA与双曲线渐近线的二维平面目标定位模型,具体如下图1所示。图中P为目标,且处于第一象限,在同一直线上的F1、F2和F3处安置信号接收器,一般接收来自目标P所传递的声信号、光信号或电磁波等信号,设线段F1F2 = F2F3=d。
首先测得目标P到F1和F3的时间差为?t1,P到F2和F3的时间差为?t2,并且通过测量可知声信号、光信号或电磁波信号的传播速度为v,所以有关系式|PF1-PF3|= v?t1,即目标P必在以F1和F3为焦点、F2为坐标原点、v?t1为实轴长的双曲线上,列出双曲线的标准方程。
[x2a2-y2b2=1] (1)
其中实轴长2a=v?t1,焦点长2c=F1F3=2d,根据关系式a2+b2=c2可求出虚轴b,最终可求得渐近线与x轴的夹角[α=arctanba]。根据双曲线性质,若目标P距离F1和F3足够远时,目标所在的双曲线与其渐近线非常趋近,而在实际测量时,目标往往都离测量设备较远,此时可以认为目标P在渐近线上,即此时目标P与x轴的偏角等于渐近线与x轴的偏角,所以PF2与F2F3的夹角为:
[α=arctan(2d2-vΔt122vΔt1)] (2)
式(2)中的d、v和?t1皆为可测物理量,因此α可以由式(2)计算得出。
设目标P的坐标为(x,y),根据直角三角形的三边关系可得以下几个关系式:
[y=xtanα] (3)
[PF22=x2+y2] (4)
[PF32=x-d2+y2] (5)
由所测目标P到F2和F3的时间差?t2,可得到|PF2-PF3|=v?t2,因此联立上面三式可得:
[x=-d2+vΔt22d+vΔt2tanα2+12vΔt22-2d2+2vΔt22tanα2] (6)
[x=-d2+vΔt22d-vΔt2tanα2+12vΔt22-2d2+2vΔt22tanα2] (7)
式(6)为P处于y轴右侧计算公式,式(7)为P处于y轴左侧的计算公式,即所求坐标结果有两个解,之后与传统双曲线定位模型处理过程一样,通过相位差、幅度差等方式,判断在双曲线的某条边上,进一步筛选出真实值。
在此基础上[8-10],本文提出了一种三维空间目标定位模型的设计方案,如图2所示。图中P为目标,坐标为(x,y,z) ,首先在Z轴上依次安置三个信号接收器(F1、F2和F3) ,在Y轴的正半轴安置一个信号接收器(F4),其中F2为三维空间直角坐标系的坐标原点,设线段F1F2 = F2F3= F2F4=d,目标P到各接收器的距离分别为PF1、PF2、PF3、PF4。
首先测得目标P到F1和F3的时延差为?t1,P到F1和F2的时延差为?t2,P到F2和F4的时延差为?t3,并且已知目标P所传递的光信号、声信号或电磁信号的传播速度为v。以三维空间直角坐标系的第一象限为例,若仰角和目标P到原点F2的距离确定,此时不管方位角为多少度,声源的z坐标都为定值,取声源与Z轴的截面图,如图3所示。
研究对比发现,此时的三维空间截面(图3) 与二维平面(图1) 一致,并满足二维平面目标定位模型的所有条件,若假定的目标P处于第一象限,因此利用二维平面目标定位模型推导出z的值如下:
[z=-d2+vΔt22d+vΔt2tanα2+12vΔt22-2d2+2vΔt22tanα2] (8)
上式(8)中的参数d、v、?t2和α皆为已知变量,因此可求得z,并根据三角关系求出[PF2=zcos(α)]。
在三维空间直角坐标系中,如图2所示,存在以下几个关系式:
[x2+y2+z2=PF22] (9)
[x2+y-d2+z2=PF42] (10)
[|PF2-PF4|=vΔt3] (11)
联立以上三式可以求得:
[x=-d4+4(dPF2)2-4PF2Δt3vd2+2(dΔt3v)2-4(dz)2-4(PF2Δt3v)2+4PF2(Δt3v)3-(Δt3v)42d]
(12)
[y=d2-(Δt3v)2+2PF2Δt3v2d] (13)
式(12)和式(13)中的参数d、PF2、?t3、v和z都已知,因此可以根据二式,求出目标P的x坐标和y坐标,至此求出目标P在三维空间直角坐标系中的坐标(x,y,z) 。
2 定位模型的仿真验证与分析
本次实验在Matlab中进行,且为理想条件。为了验证上述模型,下文所述二维平面定位模型简称二维模型,三维空间定位模型简称三维模型,文中无单位标注的物理量,所用单位均为国际标准单位。
搭建如图1和图3所示模型,假设目标P为声源,在不考虑声音传播的衰减、混响、噪声等情况下,即声源P到各个信号接收器之间为理想传播,利用Matlab进行声源定位模型仿真,设置F1、F2、F3和F4之间间距d为0.02m,声速为340m/s。
2.1 定位模型验证
在二维平面目标定位中,如图1所示,因为实验条件是理想传播,即可认为,通过声源P到各个接收器之间的距离关系计算所得的理论值?t1和?t2,等于各个接收器最终检测所得的实际时间差数值(三维空间验证中同理) 。以第一象限为例,在其中选取一组二维平面中的随机点作为声源P的坐标,并记为实际坐标(x,y),将参数d、v、?t1和?t2带入式(3)和(6)中,计算所得坐标,记为公式坐标(x0,y0),并记坐标误差(x0-x,y0-y),验证后的结果整理至表1中,单位均为国际标准单位。
由表1可看出随着x的增大,理论上误差越来越小现象,并未出现,而造成这一现象的原因便是角度误差,不同的角度对应的坐标所产生的误差各不相同,后续会加以验证。
在三维空间中,如图2所示,验证过程与二维平面一致,以第一象限为例,选取一组随机点记为实际坐标(x,y,z),再将参数d、v、?t1、?t2和?t3带入式(8)、(12)和(13)中,计算所得坐标,记为公式坐标(x0,y0,z0),并记坐标误差(x0-x,y0-y,z0-z),验证后的结果整理至表2中。
由表2可看出三维模型所产生的现象与二维模型相一致,原因在于前者是在后者基础上建立的,因此具备了由后者带来的误差,这一点从图3和式(8)、(12)和(13)可知。三维空间的误差主要是由于二维平面的误差造成的,因此下面对二维平面的误差产生原因做出验证。
2.2 误差分析
本文所提出的模型如图1所示,误差原因是利用了双曲线性质:当目标P距离F1和F3足够远时,目标所在的双曲线与其渐近线非常趋近。而上述理论中的趋近一词并不意味着相等,用渐近线与x轴的夹角(以下简称渐近线夹角),代替双曲线上的点和原点的连线与x轴的夹角(以下简称双曲线夹角),此过程中产生了理论误差。
记双曲线夹角为[α1],渐近线夹角为[α2],记角度误差?[α]=[α2]-[α1],由于[0≤α1≤90],则以每10°分为一个小段,并从每个小段中随机选定一个角度作为[α1]的值,求出随着x的增大,对应的角度误差?[α],验证后的数据记录至图4中。
观察图4可知随着x的增大,不同[α1]下的?[α]都呈下降趋势,满足随着距离的增大,双曲线和渐近线愈加趋近这一特性。从图4可知,不同角度下的?[α]曲线在x为0.5~1.5m之间区别较大,而1.5m之后,各曲线之间的误差相对较小。为求出理论上的最大误差,在x=1m的条件下,[α1]处于0~90°之间,以1°为基本单位,对所有角度下的误差?[α]进行对比,整理实验数据至图5中。
从图5中可以看出30°下存在最大误差,于是按前文定位模型验证中的方式计算对应的坐标误差,并记
[误差结果=x-x0x*100%]
y方向的誤差结果计算方式与上式相同,经计算发现当实际值x为20米时,测量值的横坐标和纵坐标误差结果约为0.075%,当x为200米时,误差结果约为0.0075%,对于大多数定位场合而言,此时误差可忽略不计。
3 定位模型的计算速度对比实例
如文献[11]中所述,传统双曲线定位模型示意图如图6所示。
图中P为目标,在同一直线上的F1、F2和F3处安置信号接收器,一般接收来自目标P所传递的声信号、光信号或电磁波等信号,设线段F1F2 = F2F3=d。首先测得目标P到F1和F2的时间差为?t1,P到F2和F3的时间差为?t2,并且通过测量可知声信号、光信号或电磁信号的传播速度为v,那么令目标P的坐标为(x,y),则有方程组:
[vΔt1=x2+(y-d)2-x2+y2vΔt2=(x-d)2+y2-x2+y2]
求解出的方程组有两个解,然后通过相位差等信息,确定唯一真实值。本次时间对比试验中,传统双曲线模型的计算时间为求解上述方程组的两个坐标值所耗费的时间,本文所提模型的计算时间为求解出式(2)、(3)、(6)和(7)所得坐标的耗费时间,本次试验选取STM32F1战舰开发板作为试验平台,利用定时器计时两模型计算一次坐标所花时间,并将多次测量结果传送至上位机,结果如图7所示。
观察图7可知,在实验条件相同的情况下,传统双曲线模型的计算用时在600us左右,而本文所提模型的计算用时在400us左右,相较于前者来说,后者在计算用时上快了200us左右,速度提升了大约33%。对于STM32F103ZET6这款微处理器而言,其执行一条指令的时间约为0.011us,200us的时间差距足够该微处理器执行18181条指令,在速度上具有较大提升。针对图7,还需说明:对于不同微处理器,在同一条件下运行所耗费的时间可能不同,但两种模型所耗费时间的关系,一定相同。
4 结束语
本文所提出的模型,以传统双曲线模型为基础,并在其基础上做出相应的改进。与传统双曲线模型对比可知,本文所提出的模型在理论计算中存在相对较小的误差,在对定位精度要求极高的环境中,本文所提出的模型要稍差于传统双曲线模型,但在理论上本文的计算复杂度要远低于传统模型,也就意味着成本更低的低端微处理器采用本文所提模型进行实时目标定位的速度有一个很大的提升。
目前低端的微处理器一般不具备DSP库,在计算三角函数时速度较慢,在今后的研究过程中,可以围绕算法进行DSP库的编写,以进一步提升低端微处理器的计算速度。此外,后续也会在此模型的基础上,加上广义互相关法、神经网络等算法,提高整体系统的定位精度。
参考文献:
[1] 方冠,杨春燕,李响,等.双模压缩光双曲线定位方案设计与分析[J].空军工程大学学报(自然科学版),2017,18(4):66-72.
[2] 朱清山,王伟.基于SAGA-BP神经网络室内定位算法[J].电子测量技术,2021,44(9):100-104.
[3] 张勇,徐小龙,徐科宇.基于加权质心法的WLAN室内定位系统[J].电子测量与仪器学报,2015,29(7):1036-1041.
[4] 龚阳,崔琛,余剑,等.基于RBF神经网络的室内定位算法研究[J].电子测量技术,2016,39(10):57-60,99.
[5] 高万明.E罗兰系统研究现状和进展[J].信息通信,2019,32(7):166-170.
[6] 郝燕玲,邓志鑫,赵国清.双曲线与圆圆定位最优岸台分布算法研究与比较[J].中国航海,2008,31(2):95-99.
[7] 殷桂华,王小辉,雷毅谈.基于TDOA的室内运动目标双曲线RFID定位方法[J].计算机应用,2014,34(S2):52-54.
[8] 杨震.基于EKF的TDOA/AOA定位算法解决TDOA多解难题[J].工业控制计算机,2019,32(9):104-106.
[9] 張晓光,吕海峰,吕传茂,等.四元十字麦克风阵声源定位算法研究[J].中国测试,2020,46(2):96-102.
[10] 陈浩,李起伟,王子龙.基于改进TDOA在煤矿井下超宽带定位算法的研究[J].电子测量技术,2021,44(6):96-102.
[11] 叶佳卉.基于TDOA的室内定位算法设计与实现[D].武汉:华中科技大学,2013.
【通联编辑:光文玲】
