智能光通信物联网背景下嵌入式控制关键设计分析
2022-10-18张康瑞
张康瑞
(桂林创研科技有限公司,广西 桂林 541004)
0 引 言
近年来,物联网工程的概念得到了较为广泛的认识,各行各业也逐渐将单独的产品进行组网,实现各产品数据的实时交互以及融合控制,进而满足实际应用需求[1]。光通信产业链基本包含光器件(含芯片、光模块)、光纤(光缆)、光设备3部分[2]。其中光器件包含光模块类产品、雪崩管、激光器等,而光设备则包含光时域反射仪、光开关、光交叉、线路自动保护以及多路复用发生器等。近年来,为了适应各种各样的应用场景,将各类型光设备进行组网,以实现特定功能[3]。各个设备之间保持良好的信息交互,同时加入了一定的控制算法,例如自动切换、功能开关、告警提交等,逐渐形成了一种由光设备组成的光通信物联网[4]。这种光通信物联网主要应用在线路保护、振动传感、中断位置预测等方面,各类型的应用最终通过上位机等形式将数据或结果提交给用户,并对整个链路进行一定的改动[5]。
光通信物联网系列应用一般需要考虑时效性、稳定性等指标。时效性指标主要体现在光层面切换指标出现时整个或部分光通信物联网由不稳定到稳定的时间。稳定性指标指在各种应用环境中能够正确处置突发事件并将信息上报,主要依赖硬件设备的稳定性和严谨的控制方式。基于此,对影响光通信物联网时效的嵌入式设计进行分析。
1 光通信物联网控制组网形式分析
光通信物联网控制组网方式的不同会影响光通信物联网的时效性指标,结合应用实际,常见的控制组网形式有以下3种。
(1)层级递进组网形式。这种组网形式中一般有3种类型的设备,即底层设备、中间设备以及顶层设备。底层设备具有独立的工作逻辑,主要功能为获取器件原始数据、初加工数据以及操作具体器件。除此之外,底层设备之间一般连接有复杂的光路。中间设备数量不定,其主要功能为使用各类型通信协议完成中间设备之间或者其与底层设备的数据交互,同时其也可以进一步加工数据并对下级设备进行控制。顶层设备的主要功能是与最高层级的中间设备进行数据交互,是用户进行操作和展示的接口。这种组网形式层级和控制逻辑较为清晰,但稍不注意,途经路由便会增加。层级递进组网结构如图1所示。
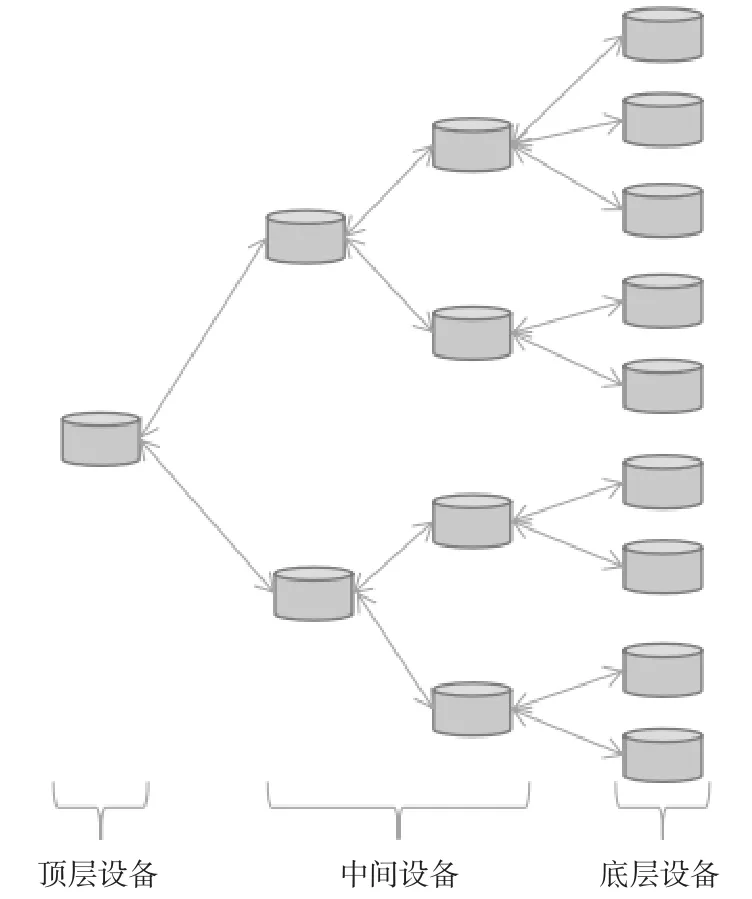
图1 层级递进组网结构
(2)单层组网形式。这种形式下各类设备互相进行数据交互并根据交互结果自动完成操作,最终由某一个底层设备进行数据总结,再将数据提供给客户。这种组网形式大多只有一层,不适用于较大型的应用场景。单层组网结构如图2所示。
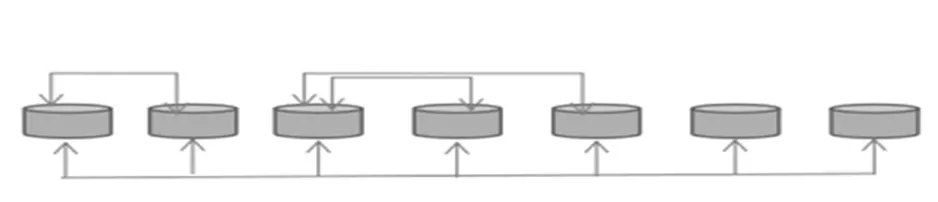
图2 单层组网结构
(3)混合组网形式。这种组网融合了层级递进和单层组网,在每层级内或跨层级设备之间加入数据交换的功能,依据同层级或跨分支设备关系的紧密性对同层或跨分支设备之间是否进行通信做出决策,该组网形式下的应用逻辑较为复杂。混合组网结构如图3所示。

图3 混合组网结构
2 光通信物联网时效性指标制约因素分析
实际业务中,切换时间等时效类参数是重要的考核指标之一,其实际体现的是从使能发生到实际操作之间的时间差。使能不仅仅指单一的使能信号,其往往由多个底层设备捕捉,捕捉后向上级设备提交,每个中间设备都会判断该信息是否为本设备应解析或处理的信息,不是便继续向上传送。如果该信息属于该设备处理,便解析信息并向下发送指令,之后将整合的数据继续向上发送。相较于传递过程,虽然底层设备内部器件的性质也会影响时效性,但其不属于主要影响因素,且相应的影响只能通过更换器件优化,故可忽略。在忽略器件影响的情况下,时间耗费主要发生在设备之间的数据交互及芯片信息处理方面。从途经链路角度分析,此过程经过多层中间设备再返回底层设备,使能信息经历了多个传递和处理的过程,这部分耗时可以优化。
从传递时的嵌入式程序设计方面分析,每个最低层级的中间层设备都会通过串口、网口等方式与底层设备通信。内部芯片的管脚有限,在某些情况下,上级设备不得不使用同一个通信接口与众多下级设备通信。在下级设备较多的情况下,由于各设备同时向上传送会造成接口堵塞,因此只能使用一些轮询查询下级设备信息的方式获取其信息。这种方式循环一次才能更新全部的下级设备信息,造成信息更新延迟。在中间层设备通信之间,轮询依然会影响信息更新的速度。尤其在下级设备的设备信息没有变更时,仍然对该设备进行查询,占用一定的时间资源。
3 解决方法
3.1 优选控制算法在控制网中的位置
不同应用情景包含着不同的控制算法,不同的控制算法其放置位置也并不相同。
对于层级递进的组网方式,控制算法等放在离各判断所需的底层设备最近层级的设备中,尽可能减少途径的链路。对于层数为N的层级递进组网(底层设备层数记为1,顶层设备层数记为N),如果在顶层设备进行逻辑判断,判断后再将设置指令返回底层,共需经过2N-3个设备进行处理。如果在R(R<N)层进行处理,经过的设备数仅为2R-3。设备光通信网信息传递过程中的链路长度与传递时间呈正相关,将操作的判定放置在与底层设备最近的节点处,能够降低途径链路长度,进而减少时延。
对于混合组网的形式,则对各种需要满足的应用情景进行模拟,根据模拟结果确定最优的控制程序放置位置。由于混合组网模式较为复杂,因此此类组网往往选用编写程序的方式进行模拟。首先,不考虑控制组网,单独对底层设备外的光链路进行模拟,通过模拟可以得出各底层设备是否会满足使能条件,即外部光路的改变能否促使底层设备发生信息改变或告警。模拟时尤其需注意外部光路长度等的模拟,在实际应用中,外部光路有时会导致底层设备获得使能的时间产生毫秒级的时间差,此时间差会影响具体的控制逻辑。例如分光器两端分别经过30 km光纤和180 km光纤与两个光探测器相连,当分光器入口光源拔出,线路末端两个关于光强的告警存在着时间差,此时间差经常会造成逻辑失效。外部光路的模拟主要包含链路长度和链路节点的模拟,其中光路节点主要模拟光路的走向和由接头损耗等造成的光衰,链路长度主要使用光纤的长度、衰减系数等指标进行模拟。其次,对控制逻辑的放置位置进行时间模拟。每个设备节点的分枝数均不一致,先计算出所有可能的控制信息传递路径,然后计算各途径路由所经历的时间。时间以第一个使能条件满足开始,以最后一个底层设备收到操作指令结束。最后,对底层设备接受指令之间的时间差进行模拟,明确该时间差内光链路特性是否发生改变、改变的链路特性是否会重新反馈至底层设备、反馈至底层设备的信息是否会引起控制算法生效以及此场景下生效的控制算法所带来的结果是否符合应用场景要求等。各底层设备收到上级设备发来的指令会存在一定的先后性,由于底层设备收到指令便进行操作,因此会产生时间差,该时间差有可能导致意外情况发生。通过以上步骤,最终可以寻找出能够稳定实现该应用场景且耗时最少的控制算法具体放置位置。
3.2 底层设备融合
上级设备轮询查询底层设备,每个底层设备在同一轮询内只会查询一次,信息的更新速度较低。在无放置地点等因素的限制时,可以将底层设备进行融合,即将多个底层设备通过硬件设计等整合为一个设备,这种情况下删减了轮询查询步骤。
3.3 变更轮询查询
如果已知光通信控制网某一部分发生更改的概率较小,这种情况下发生更改的设备先将是否更改的信息提示发至某一个固定设备中,上级设备每隔一段时间查询更改提示信息,变主动轮询查询为更改后再查询。需要注意的是,此方法仅适用于改动几率较小的控制网组分支。
4 结 论
光通信物联网对于控制时效性的要求较高,控制算法的放置位置所造成的路由冗余、查询方式的不合理均会导致时延较长。对于此类问题,可通过优化控制算法放置位置、底层设备融合以及变更查询方式进行改善。
