基于数字信号处理器的船用异步电机矢量控制方法
2022-10-18雷道仲
雷道仲
(1. 湖南省电子学会,湖南 长沙 410200;2. 湖南信息职业技术学院,湖南 长沙 410200)
0 引 言
异步电机已成为船舶电力领域常用的发电设备。船舶运行环境过于复杂,船用异步电机需要具备更高的控制性能。矢量控制技术是控制船用异步电机的重要方法,矢量控制是电气传动领域的重要控制技术,矢量控制技术的调速性能优越,可以实现船用异步电机的精准控制。船用异步电机是一个多变量、具有极强非线性时变参数组成的强耦合系统,异步电机的定子电压、定子电流控制是异步电机矢量控制的重要控制方式,异步电机矢量控制可以令船用异步电机保持在最佳运行状态。船用异步电机受到运行频率、环境温度以及磁饱和程度影响,转子磁场定向存在差异,影响船用异步电机矢量控制的动态响应性能。船用异步电机矢量控制时,应具备自适应控制性能,提升船用异步电机矢量控制的动态响应性能。船用异步电机矢量控制时,经过变频调速后的电机动态性能应满足电机的调速性能需求。
目前针对异步电机控制的研究较多,祝新阳等[对滑模观测器的常数切换函数进行改进,引入了低通滤波器,利用改进后的滑模观测器控制永磁同步电机,通过实验验证该方法可以实现永磁同步电机的频率与转速的精准控制。胡冰等利用无速度传感器对感应电机进行矢量控制,该方法将积分器利用低通滤波器代替,提升了磁链的观测精准性。通过实验验证该方法可以改善电机控制过程中,受到随机扰动与测量噪声的影响,提升参数估算精度。以上2种方法虽然可以实现电机的控制,但是存在运算速度过慢影响控制速度的缺陷。数字信号处理器具有运算速度快的特点,面向电机控制的数字信号处理器可以快速运行矢量控制方法,提升船用异步电机的矢量控制性能。通过实验,验证该方法具有良好的控制稳定性。
1 船用异步电机矢量控制方法
1.1 船用异步电机数学模型
船用异步电机矢量控制时,依据转子磁链实施两相同步旋转定向时,存在表达式如下:

式中:ψ与ψ分别表示坐标系中,船用异步电机转子磁链的轴分量与轴分量; ψ与ψ分别表示坐标系中,船用异步电机转子磁链的轴分量与轴分量;ψ表示船用异步电机转子磁链的旋转矢量。
依据以上公式,获取坐标系下,船用三相异步电机的状态方程表达式如下:

式中:i与i表示坐标系内,船用异步电机转子电流的轴分量与轴分量;与n分别表示船用异步电机的转动惯量以及磁极对数;L 与L分别表示定子与转子间的互感与自感;T与T分别表示转子的电磁时间常数以及负载转矩;ω与 ω分别表示船用异步电机的同步角速度与转子旋转角速度;T表示电磁转矩。
通过式(4)获取船用异步电机转子磁链的旋转矢量表达式如下:

式中,表示微分算子。
船用异步电机的同步旋转角速度表达式如下:

电磁转矩的表达式如下:

式(5)~式(7)构成船用异步电机矢量控制的基本方程,依据以上公式作为矢量控制的理论基础,利用数字信号处理器矢量控制船用异步电机。
1.2 数字信号处理器的矢量控制方法
1.2.1 数字信号处理器设计
数字信号处理器的内部程序和数据分开设置,数字信号处理器设置的硬件乘法器,可以为船用异步电机矢量控制提供控制指令,实时控制数字信号运算。选取TMS320F28335型单片机作为船用异步电机矢量控制的数字信号处理器。该数字信号处理器工作频率高达150 MHz,满足船用异步电机矢量控制的高精度控制需求;具备32位浮点处理单元,包含丰富的外部I/O口,存储空间大。所选取数字信号处理器中包含针对电机矢量控制设置的专用外围,具有极高的模数转换能力。利用数字信号处理器处理矢量控制的转矩、磁链、转速估算等控制过程,提升船用异步电机的控制性能。
1.2.2 数字信号处理器的异步电机矢量控制
利用所选取的数字信号处理器,运行异步电机矢量控制的转速估算、转矩电流计算、磁链调节等过程,提升矢量控制的运算速度。矢量控制方法将船用异步电机定子电流通过旋转变换方法解耦,实现船用交流异步电机的转矩控制与磁链控制。利用数字信号处理器完成船用异步电机矢量控制的总体结构图如图1所示。可以看出,利用异步电机的转速估算结果与转速指令值间的差值,通过速度控制器获取船用异步电机下一指令周期的电磁转矩输入值,将所获取电磁转矩输入值作为转矩环的输入量。设置电磁转矩反馈值作为转矩环的另一输入量,将二者之差设置为矢量控制转矩调节器的输入值,获取电压矢量的转矩分量指令值。选取PI控制算法实现船用异步电机的转速估计、转矩调节以及磁链调节,利用异步电机的状态方程估算转子磁链,实现船用异步电机的磁通电流、速度以及转矩闭环控制。

图1 船用异步电机矢量控制方法Fig. 1 Vector control method of marine asynchronous motor
2 实例分析
为了验证所研究方法的控制性能,在Simulik软件中,构建仿真模型。所构建船用异步电机模型的环境为海洋环境,直流母线电压为220 V,脉宽调制的载波频率为40 Hz,矢量控制时的采样周期为1 ms。所构建船用异步电机模型的参数设置如表1所示。

表1 船用异步电机模型参数Tab. 1 Model parameters of marine asynchronous motor
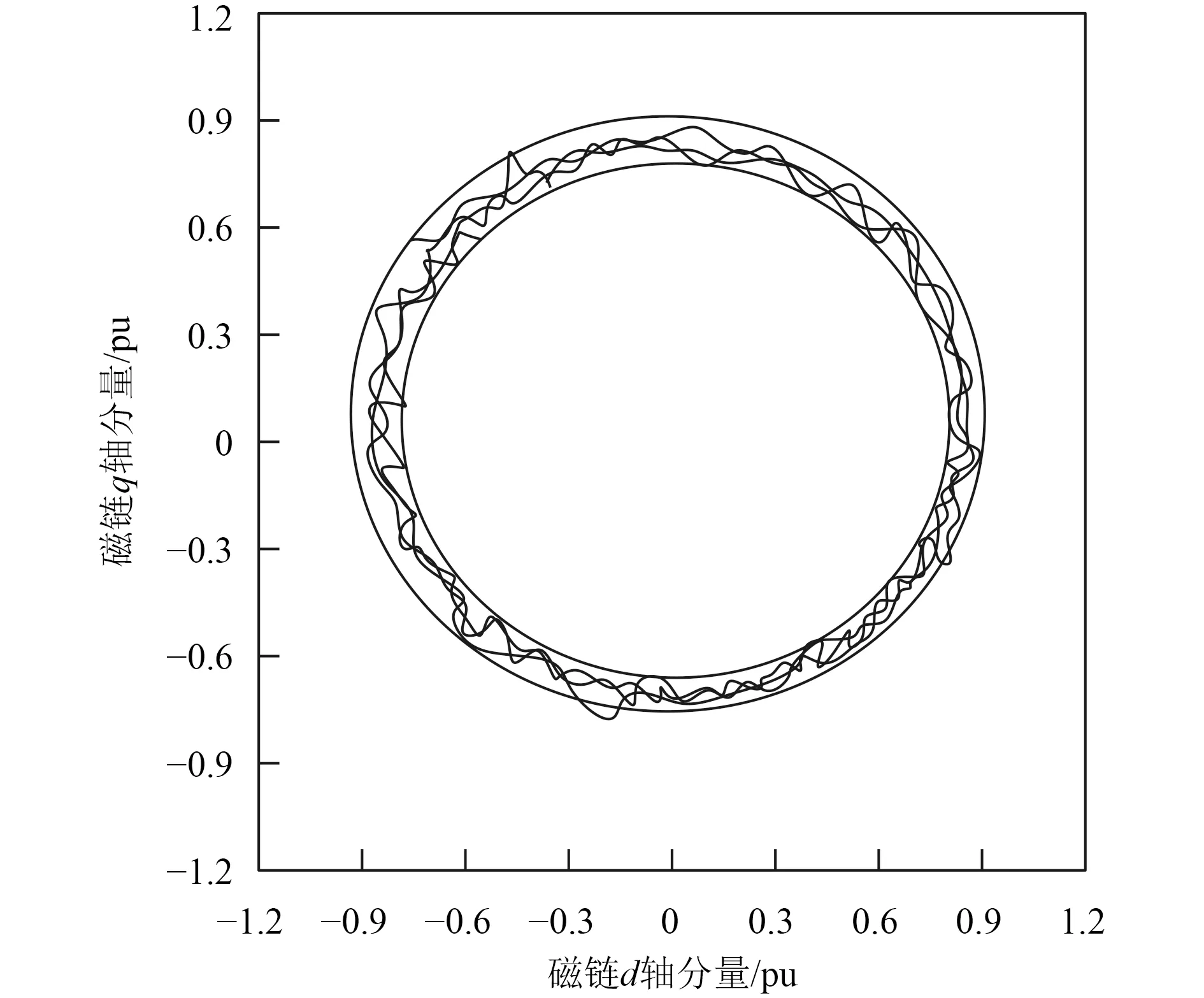
图2 解耦后定子磁链变化Fig. 2 Stator flux changes after decoupling
采用本文方法对船用异步电机进行矢量控制,解耦后定子磁链变化结果如图2所示。可以看出,采用本文方法对船用异步电机进行矢量控制,解耦后异步电机的定子磁链轨迹与理想圆形轨迹极为逼近,验证本文方法对船用异步电机矢量控制的控制效果良好。通过矢量控制,使完成解耦后的磁链轨迹与圆形更加接近,具有良好的控制性能,满足矢量控制的期望控制状态。采用本文方法控制船用异步电机的跟踪能力良好,缩小励磁控制静差范围,磁链波形波动极小,正弦度良好,满足转子磁场控制时,磁链不变的控制效果。
设置船用异步电机的初始转速为500 r/min,2 s时将转速提升至1 000 r/min,统计船用异步电机的实际转速与估算转速的变化结果,统计结果如图3所示。可知,采用本文方法对船用异步电机矢量控制,可以获取精准的异步电机转速估算结果。精准控制船用异步电机。本文方法输出的异步电机转速估计值与异步电机实际转速较为接近,实验结果验证本文方法的转速估计性能良好。

图3 实际转速与估算转速对比Fig. 3 Comparison between actual and estimated rotational speeds
采用本文方法矢量控制船用异步电机,异步电机运行时间为2 s时,对船用异步电机添加一个大小为40 N·m的负载,定子电流控制结果如图4所示。可知,采用本文方法对船用异步电机矢量控制时,异步电机的定子电流仅存在0.5 s左右的波动,即可快速恢复至正常电流波动状态。实验结果验证本文方法矢量控制船用异步电机时,可以控制异步电机定子电流在添加负载时,快速恢复至正常值,控制性能良好。
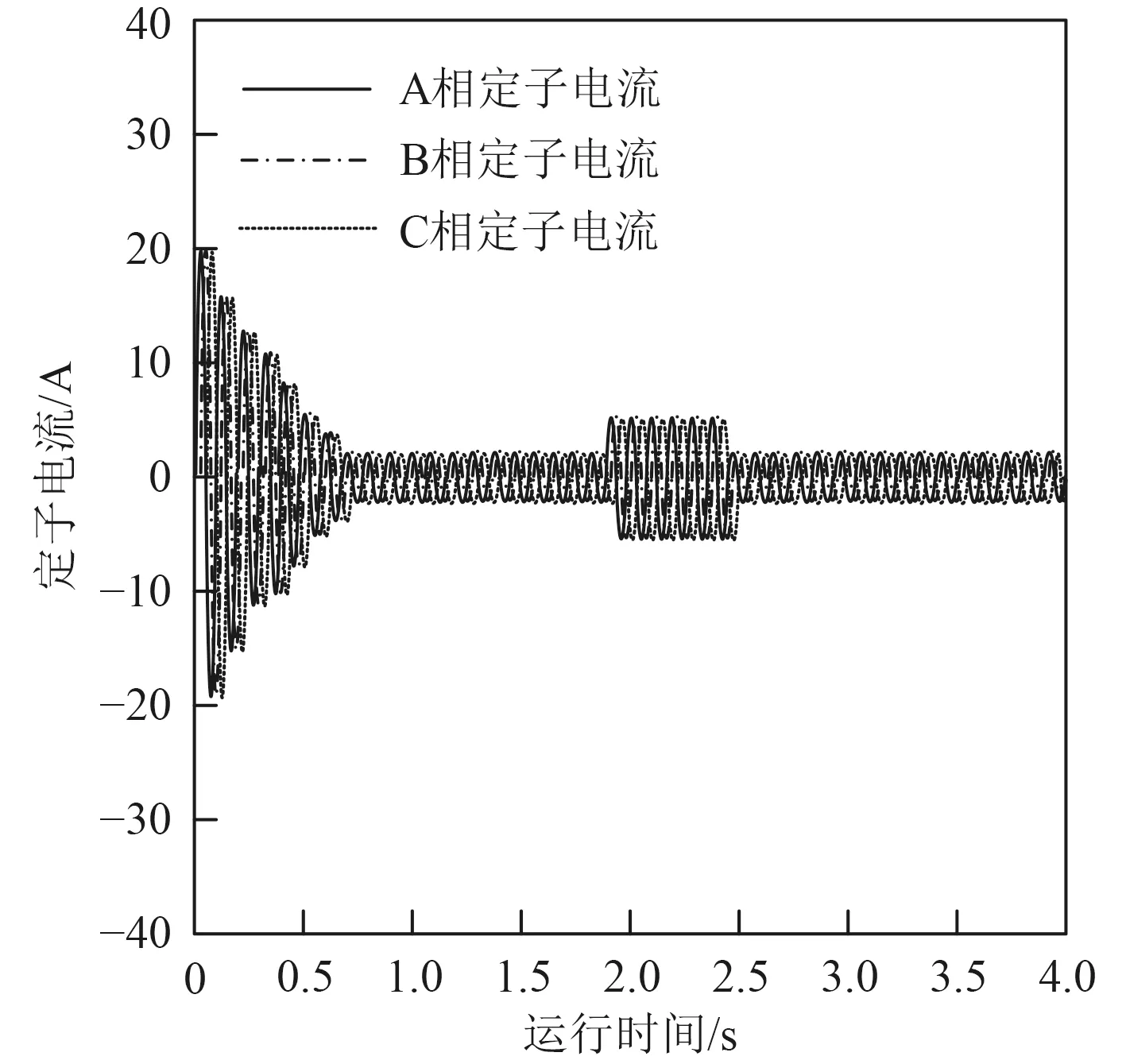
图4 定子电流控制结果Fig. 4 Stator current control results
转矩控制结果如图5所示。可以看出,采用本文方法矢量控制船用异步电机时,异步电机的转矩可以依据设定参数变化而有所变化。异步电机转矩经过本文控制,可以快速恢复至理想的20 N·m,维持稳定状态。
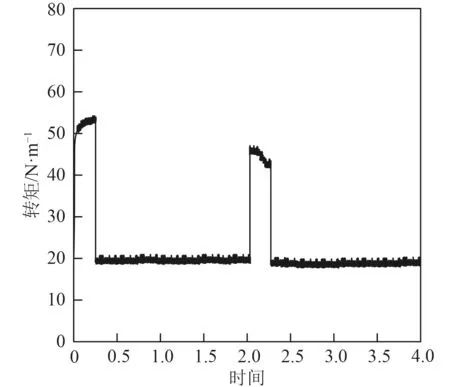
图5 转矩控制结果Fig. 5 Torque control results
转速控制结果如图6所示。可以看出,采用本文方法对船用异步电机矢量控制,添加负载时,异步电机的转速仅存在短暂波动,即可快速达到理想转速。船用异步电机运行环境较为复杂,本文方法可以实现异步电机的矢量控制,使船用异步电机在复杂海洋环境运行时,仍然具有较好的控制性能,满足自适应的控制需求。

图6 转速控制结果Fig. 6 Speed control results
3 结 语
将数字信号处理器应用于船用异步电机矢量控制中,利用数字信号处理器的高速度运算能力,提升船用异步电机矢量控制性能。实验验证该方法可以实现船用异步电机的解耦控制,具有控制方式简单,可以适应船用异步电机使用环境的高动态性能,控制精度极高。该方法属于高性能、低功耗的控制方法,应用前景广泛,适用于复杂的船舶航行环境中,通过高效的控制性能提升船舶航行可靠性。船用异步电机矢量控制方法,无需设置速度传感器,即可获取船用异步电机转速,转速估算精度高。船用异步电机转速动态变化时,可以快速跟踪电机的输出转速,跟踪性能强。
