基于混合粒子群算法的船用离心泵电机优化研究
2022-10-18付荣赫邢吉生
付荣赫,邢吉生
(北华大学 电气与信息工程学院,吉林 吉林 132021)
0 引 言
离心泵作为船舶系统不可或缺的一部分,其在运行时起到了关键作用,进而对驱动电机的控制效果和性能等提出了很高要求。电机能否正常稳定运行,直接影响到离心泵能否稳定工作,进而影响到船舶各系统。因此,运用自动化技术和智能优化算法实现离心泵电机更加精确、稳定并快速的控制,提升离心泵的运行效率,具有非常重要的意义。
PID控制由于应用广泛,原理易懂,因而得到了普遍运用。PID控制器参数整定优化的结果对于离心泵电机的控制效果起决定作用,然而在传统PID参数整定过程中含有复杂棘手、难度大等缺点,传统方式很难在复杂系统中整定出理想的最优值,致使其控制效果不佳,不能满足系统的控制要求。
现如今,随着学者们对智能算法的深入研究,众多群智能算法被引入到PID参数整定优化问题中。但随着研究的深入,算法中的问题也逐步显现出来。比如PSO算法存在精度差、易陷入局部最优等问题。为此,本文提出一种将蝙蝠随机移动概念引入粒子群算法中来优化PID参数的方法,在保留算法简单、易实现的基础上,算法的精度、全局搜索能力等得到了显著提高,优化后的PID控制器能更好地达到系统的控制要求,且调节时间少、稳定性强,使得离心泵电机能够更加安全稳定运行。
1 PID控制
PID控制器由3部分构成,分别为比例、积分和微分等,一般形式下式:

式中:为系统误差;K,K,K分别对应PID控制器中3个部分的系数,通过调整这3个系数,找到最优值,就能够得到最好的控制成果,达到改善控制性能的目的。PID的性能由这3个参数是否合理决定,所以,优化其参数具有重大意义。将式(1)转换为传递函数形式:

式中:T和T为其所对应的时间常数。
在众多的性能指标中,选用ITAE作为误差性能指标,一般形式如下式:

2 PID控制模型
2.1 船用离心泵电机研究
在船舶系统中,离心泵作为一种重要设备需向系统中输送水和油等液体,用于消防、抽水、排水等系统中,它是运用离心力的原理运行的,并将电机产出的机械能转换成被甩入液体的动能和势能。离心泵大致由泵体、叶轮、泵轴、轴承、密封环等构成,其结构如图1所示。
通电后电机获得电能并驱动离心泵运转,同时又要求电机在一定的环境下稳定工作。所以正确选择驱动电机是使得离心泵效率高并稳定运行的关键,需仔细探讨其性能和可靠性等因素。在实际使用中遭遇意外情况或故障时,对驱动电机的效率、调节时间等有着很高的要求,以达到能快速启停、增减速等效果。在众多的驱动电机中,永磁直流电机特点显著,因其损耗小,运行简便,便于控制,响应速度快,易调速等特性,将其用作船用离心泵的驱动电机。

图1 离心泵结构图Fig. 1 Structure diagram of centrifugal pump
2.2 电机传递函数
运用电机的机械特性和参数等,能简单并快速获取传递函数。与他励直流电机相比,永磁直流电机用永久磁体取代了励磁绕组,其电路图如图2所示。电磁转矩T和 感应电动势E是电机实现电能机械能之间相互转换的主要参数。电动机两端的电压值为U,R是电枢电路的电阻,电机的转速为,L是电枢回路的自感,M是粘性摩擦负载。

图2 永磁直流电机等效电路图Fig. 2 Equivalent circuit diagram of permanent magnet DC motor
永磁直流电机转速发生变化时,电磁转矩方程为:

式中:T为电枢绕组在磁场中受力产生的电磁转矩;为输出转矩;为转动惯量;ω为角速度。
负载阻转矩方程为:

式中:C为 转矩常数;I为电动机电枢电流。
电枢电压方程为:


2.3 传递函数的确定
采用某型号永磁直流电机,将其参数代入式(7)中,可得传递函数为:

此系统为典型的2阶系统,对永磁直流电机控制系统的传递函数在Matlab软件中仿真,其在Simulink环境下其仿真图如图3所示。

图3 Simulink环境下PID仿真图Fig. 3 PID simulation diagram under Simulink environment
3 智能算法
3.1 粒子群算法
粒子群算法(简称PSO)主要是运用粒子间的彼此配合,共享全局最优位置来搜寻待优化问题的最优解。该算法以所有个体的位置作为待优化问题的解,用适应度函数来计算粒子的适应值,通过将所有个体的适应值进行对照,判断粒子位置的好与坏。当所有个体在待优化问题解的空间中移动时,每次迭代中粒子的移动方向和距离由一个速度变量所决定。经过不断更新个体位置和最优位置,粒子在搜索空间中逐渐逼近最优位置。
粒子在搜索空间中的速度和位置由式(9)和式(10)来确定:

式中:为粒子位置,为粒子速度,为学习因子;,∈[0,1], 其为随机数;ω为惯性因子,普遍取值为0.1~0.9;P为粒子的最好位置,为全体粒子群的最好位置。
运用PSO优化PID参数的大致流程如图4所示。

图4 PSO优化PID过程图Fig. 4 PSO Optimization PID process diagram
3.2 蝙蝠算法
蝙蝠算法(简称BA)是利用蝙蝠觅食时回声定位特性的一种群智能算法。其中,蝙蝠靠随机改变其速度、位置和超声波频率等来搜寻猎物。当它靠近猎物时,蝙蝠发出的超声波频率会加强,与此同时响度也会降低,表明距离猎物越来越近。效仿蝙蝠搜索猎物过程,运用式(11)更新其频率,运用式(12)更新其速度,运用式(13)更新其位置。

式中: ξ∈[0,1] ,为随机数;为频率变化的最小值,为频率变化的最大值;全局蝙蝠最优位置。
当确定了当下最优值后,每只蝙蝠按照式(14)做随机移动,进而产生一组新解。

式中:x为新的解位置,x为上一代的解位置;τ∈[-1,1] 为随机数;A为其响度在时刻均值。
3.3 混合粒子群算法(HPSO)
对于PSO存在容易陷入局部最优等问题,提出混合粒子群算法(简称HPSO)。将蝙蝠算法融入到PSO算法中,增强粒子多样性,并加强局部搜索能力。将蝙蝠算法里种群中的每个个体都可以描述成PSO中的粒子进行搜索,将算法里蝙蝠随机移动的概念引入到PSO中,对其位置进行更新,此方法可增强粒子位置的多样性。位置更新公式如下式:


运用式(15)和式(16)进行反复迭代,通过反复更新粒子的位置,将其产生的新位置和目前的最优位置进行对比,找出最优解继续迭代,直至找出全局最优解,进而找到最佳参数值。
运用HPSO优化其参数的结构图如图5所示,其大致流程如下:
1 初始化参数。拟定粒子数目,K,K,K和惯性权重的范围,学习因子的值,音量参数值,设定最大迭代次数maxIter,然后将种群中所有个体的位置和速度初始化。
2 调用sim函数。把所有粒子的位置分量的值各自赋给K,K,K,启动系统仿真模型,得到性能指标,并输出每个粒子对应的适应值。
3 对粒子群的运动状态进行更新。运用式(8)重新更换其速度,运用式(9)重新更换其位置,判断其速度和位置是否越过了既定区域,若其越过,则用范围限值替换当前的速度或位置。
4 对于每个个体,把它的适应值和所有群体所经过的最佳位置的值相比,要是较好,便把它用作当前的。
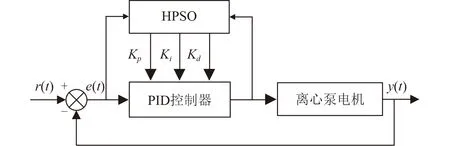
图5 HPSO整定PID参数控制图Fig. 5 HPSO tuning PID parameter control diagram
5 对于每个个体,把它的适应值和此粒子所经过的最佳位置P的值相比,要是较好,便把它用作当前的P。
6 引入BA算法中随机移动理念,运用式(15)和式(16)计算下一代的位置,更新和P。
7 判别其有没有达到结束要求。要是已达到,则输出最佳参数,即PID参数的最佳组合,要是没有达到,返回步骤3重新执行。
4 仿真结果与对比分析
分别选用HPSO,PSO和传统方法对系统进行PID控制器的参数优化。假设粒子数nop=30,迭代次数的最高值maxIter为100次,K,K,K位置搜索范围为[-10,10],学习因子取值皆为2,惯性权重从0.9降低至0.2,音量参数为0.1,τ取值为1。
在图3的仿真模型中,其输入为单位阶跃信号,仿真时长设为10 s,采样时长d=0.001 s。多次迭代后其适应值收敛图如图6所示,输出其各参数如表1所示。
将3种方法优化所得的参数值代入离心泵电机控制系统的PID控制器中,并在Matlab中运行,得出响应曲线如图7所示。

图6 适应值收敛曲线Fig. 6 fitness convergence curve
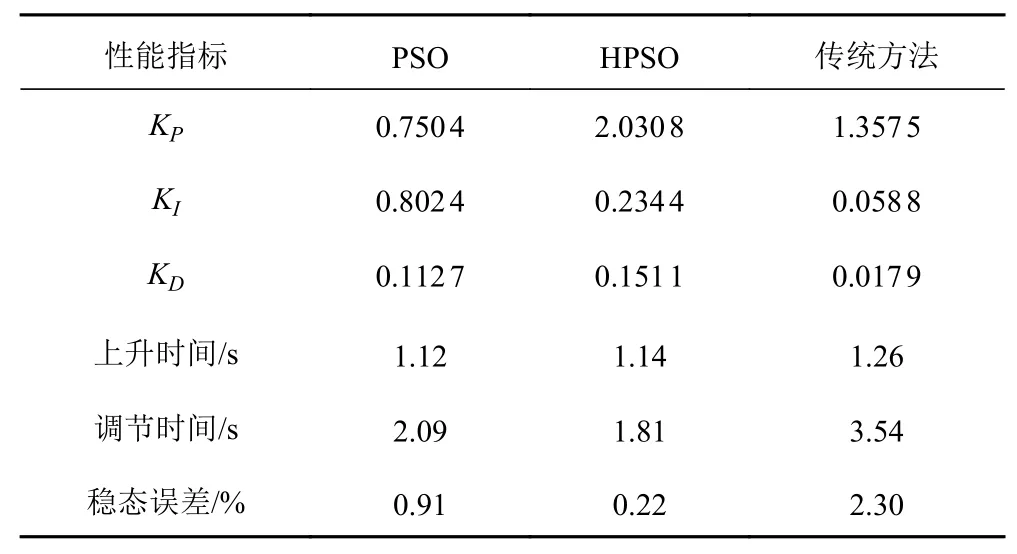
表1 PID整定优化结果Tab. 1 PID tuning optimization results

图7 系统阶跃响应输出曲线Fig. 7 System step response output curve
由图6可知,随着迭代次数的增加,HPSO在迭代次数为25次时适应值得到了收敛并得到了较高的精度,而PSO迭代到31次时适应值得到了收敛,因此HPSO展现出了收敛速度快、精度高等优势。由图7和表1可知,标准PSO的上升时间短,进而导致PSO的响应速度快于HPSO算法,但在超调量、稳态误差等方面HPSO明显更少。
HPSO到达稳定所用的调节时间为1.81 s,优于PSO稳定的调节时间2.09 s和传统方法的3.54 s,因此系统的调节速度更快,能很快达到稳定状态。经过HPSO优化的PID最佳参数,使其选出的3个值恰当,能够很好将调节时间和超调量等优化到尽可能少,使得系统能得到良好的控制效果,因而证明此方法的可行性。
5 结 语
本文以船舶离心泵电机为研究对象,常规PID控制存在稳定性能差、控制精度低等问题,提出运用HPSO优化PID参数的方法,并验证了引入蝙蝠随机移动概念后的HPSO算法通过增强粒子多样性能改善PSO易陷入局部最优等缺点的可行性。通过对比3种方法参数整定优化的结果,在控制效果、调节时间、性能指标和稳定性等方面,HPSO算法比其他2种方法效果更好,显著提高了系统的稳定状态,有效提升了离心泵电机控制系统性能和运行稳定性。
